射源及探测器固定的ct系统
技术领域
1.本公开涉及一种射源及探测器固定的ct系统。
背景技术:
2.电子计算机x射线断层扫描技术ct(computed tomography)在目前医学影像中发挥着举足轻重的作用,传统ct可以提供清晰度高的三维信息,但其放射剂量大、价格昂贵,尤其在口腔医学中的应用有限。
3.新型的锥形束ct(cbct)系统具有放射剂量小、分辨率高、价格便宜等显著优点。常规cbct系统中射源和探测器围绕扫描物体旋转扫描,然后通过三维重建技术生成物体的三维信息。
4.传统的锥形束ct系统的结构较为复杂分散、整机重心高、设备安装要求高。由于射源和探测器需要转动,其内部通常设置有驱动电路(例如,用于驱动旋转臂旋转以带动射源和探测器旋转)和实现其它功能的电路。立式固定架和旋转臂远离地面,导致锥形束ct内部各种电路的布线设置复杂繁琐并且需要进行布置以尽量避免暴露在外部。而且,由于射源和探测器固定在旋转臂上,为射源和探测器提供电压的布线设置也相对复杂。
5.传统锥形束ct系统由于机械结构限制,成像视野较小且锥形束伪影严重,而基于外壳(射源和探测器)旋转的锥形束ct系统,在实现大视野的同时对外壳结构和功能要求较高,因此成本较高,体积虽低于传统螺旋ct但仍未能达到最优体积。
技术实现要素:
6.为了解决上述技术问题之一,本公开提供了一种射源及探测器固定的ct系统。
7.根据本公开的一个方面,提供了一种射源及探测器固定的ct系统,包括:
8.射源,所述射源发射x射线并且所述射源的位置固定;
9.探测器,所述探测器接收所述射源发射的x射线并且所述探测器的位置固定;
10.旋转平台,所述旋转平台承载被测对象,并且能够被转动以便带动所承载的被测对象进行转动,从而在所述被测对象的转动过程中,所述射源对转动的被测对象进行照射,并且所述探测器根据所接收的x射线能量来得到电信号;以及
11.处理装置,所述处理装置根据所述电信号来得到所述被测对象的影像。
12.根据本公开至少一个实施方式的ct系统,还包括旋转驱动装置,所述旋转驱动装置控制所述旋转平台的旋转。
13.根据本公开至少一个实施方式的ct系统,所述旋转驱动装置包括:
14.旋转支撑部,所述旋转支撑部与所述旋转平台可转动连接,以便所述旋转平台能够相对于所述旋转支撑部进行转动;
15.驱动部,所述驱动部与所述旋转支撑部相互作用,以便通过所述驱动部与所述旋转支撑部的作用,使得所述旋转平台转动,或者所述驱动部与所述旋转平台相互作用,以便通过所述驱动部与所述旋转平台的作用,使得所述旋转平台转动。
16.根据本公开至少一个实施方式的ct系统,所述驱动部为驱动齿轮,所述驱动齿轮的轮齿与所述旋转支撑部所设置的轮齿相啮合,并且所述驱动齿轮相对于所述旋转平台固定配置,
17.所述旋转驱动装置还包括驱动电机,所述驱动电机的电机轴相对于所述驱动齿轮固定连接,以便通过所述电机轴的转动带动所述驱动齿轮转动,并且基于所述驱动齿轮的轮齿与所述旋转支撑部的轮齿的啮合作用,来通过所述驱动齿轮带动所述旋转平台转动。
18.根据本公开至少一个实施方式的ct系统,所述旋转支撑部包括:
19.外环件,所述外环件与所述ct系统的固定底座固定连接;
20.内环件,所述内环件与所述旋转平台连接,并且所述外环件位于所述内环件的外周;以及
21.滚动体,所述滚动体设置在所述外环件与内环件之间;
22.其中,所述外环件的外周设置有与所述驱动齿轮的轮齿相啮合的轮齿,所述驱动齿轮能够绕所述外环件进行转动,从而带动所述旋转平台及内环件相对于所述外环件进行转动。
23.根据本公开至少一个实施方式的ct系统,所述驱动齿轮的轮齿数量少于所述外环件所设置的轮齿的数量。
24.根据本公开至少一个实施方式的ct系统,所述驱动电机的电机轴固定设置在所述驱动齿轮的内孔,并且使得所述驱动齿轮不相对于所述电机轴进行转动。
25.根据本公开至少一个实施方式的ct系统,还包括电机法兰,所述驱动电机固定安装至所述电机法兰,并且所述电机法兰与所述旋转平台固定连接,以使得所述驱动齿轮相对于所述旋转平台固定配置。
26.根据本公开至少一个实施方式的ct系统,所述射源和所述探测器固定在所述旋转平台上的的外周位置。
27.根据本公开至少一个实施方式的ct系统,所述ct系统为锥形束ct系统。
附图说明
28.附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
29.图1示出了根据本公开的一个实施例的ct系统的示意图。
30.图2示出了根据本公开的一个实施例的ct系统的局部示意图。
31.图3示出了根据本公开的一个实施例的ct系统的局部剖视示意图。
具体实施方式
32.下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
33.需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开的技术方案。
34.除非另有说明,否则示出的示例性实施方式/实施例将被理解为提供可以在实践中实施本公开的技术构思的一些方式的各种细节的示例性特征。因此,除非另有说明,否则在不脱离本公开的技术构思的情况下,各种实施方式/实施例的特征可以另外地组合、分离、互换和/或重新布置。
35.在附图中使用交叉影线和/或阴影通常用于使相邻部件之间的边界变得清晰。如此,除非说明,否则交叉影线或阴影的存在与否均不传达或表示对部件的具体材料、材料性质、尺寸、比例、示出的部件之间的共性和/或部件的任何其它特性、属性、性质等的任何偏好或者要求。此外,在附图中,为了清楚和/或描述性的目的,可以夸大部件的尺寸和相对尺寸。当可以不同地实施示例性实施例时,可以以不同于所描述的顺序来执行具体的工艺顺序。例如,可以基本同时执行或者以与所描述的顺序相反的顺序执行两个连续描述的工艺。此外,同样的附图标记表示同样的部件。
36.当一个部件被称作“在”另一部件“上”或“之上”、“连接到”或“结合到”另一部件时,该部件可以直接在所述另一部件上、直接连接到或直接结合到所述另一部件,或者可以存在中间部件。然而,当部件被称作“直接在”另一部件“上”、“直接连接到”或“直接结合到”另一部件时,不存在中间部件。为此,术语“连接”可以指物理连接、电气连接等,并且具有或不具有中间部件。
37.为了描述性目的,本公开可使用诸如“在
……
之下”、“在
……
下方”、“在
……
下”、“下”、“在
……
上方”、“上”、“在
……
之上”、“较高的”和“侧(例如,如在“侧壁”中)”等的空间相对术语,从而来描述如附图中示出的一个部件与另一(其它)部件的关系。除了附图中描绘的方位之外,空间相对术语还意图包含设备在使用、操作和/或制造中的不同方位。例如,如果附图中的设备被翻转,则被描述为“在”其它部件或特征“下方”或“之下”的部件将随后被定位为“在”所述其它部件或特征“上方”。因此,示例性术语“在
……
下方”可以包含“上方”和“下方”两种方位。此外,设备可被另外定位(例如,旋转90度或者在其它方位处),如此,相应地解释这里使用的空间相对描述语。
38.这里使用的术语是为了描述具体实施例的目的,而不意图是限制性的。如这里所使用的,除非上下文另外清楚地指出,否则单数形式“一个(种、者)”和“所述(该)”也意图包括复数形式。此外,当在本说明书中使用术语“包含”和/或“包括”以及它们的变型时,说明存在所陈述的特征、整体、步骤、操作、部件、组件和/或它们的组,但不排除存在或附加一个或更多个其它特征、整体、步骤、操作、部件、组件和/或它们的组。还要注意的是,如这里使用的,术语“基本上”、“大约”和其它类似的术语被用作近似术语而不用作程度术语,如此,它们被用来解释本领域普通技术人员将认识到的测量值、计算值和/或提供的值的固有偏差。
39.根据本公开的一个实施方式,提供了一种射源及探测器固定的ct系统。其中该ct系统可以为锥形束ct(cbct)系统。
40.本文中所称的“射源及探测器固定”是指:在ct系统工作时,射源及探测器不进行转动,一直处于固定的位置。
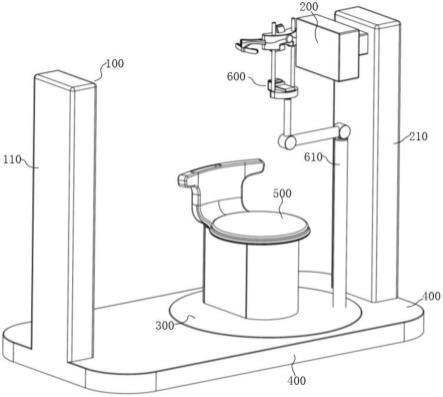
41.如图1所示,该ct系统可以包括射源100、探测器200和旋转平台300。
42.射源100可以发射x射线,例如锥形束x射线,并且射源100可以通过射源固定架110进行固定,在一个实施例中,可以将射源通过射源固定架110固定至ct系统的底座400上。此
外,射源100所需线路可以设置在射源固定架110中,例如在射源固定架110中可以设置有允许线路通过的空间。
43.探测器200可以为平板探测器,并且用于接收射源100发射的x射线。这样可以通过射源100发射的x射线照射到被测对象之后再由探测器200接收,并且探测器200根据所接收的x射线能量来得到电信号。此外ct系统还可以包括处理装置,处理装置根据电信号来得到被测对象的影像。
44.探测器200的位置也可以是固定的,并且可以通过探测器固定架210进行固定,探测器固定架210可以与ct系统的底座400相固定。此外,探测器200所需线路可以设置在探测器固定架210中,例如在探测器固定架210中可以设置有允许线路通过的空间。
45.如图1所示,射源固定架110和探测器固定架210均可以设置在底座400上,并且二者可以对向设置,位于被测对象的两侧。
46.旋转平台300可以承载被测对象,并且能够被转动以便带动所承载的被测对象进行转动,从而在被测对象的转动过程中,射源对转动的被测对象进行照射,从而可以得到被测对象的ct数据。例如旋转平台300可以设置底座400上,并且能够相对于底座400进行转动。
47.此外,被测对象可以为人体的口腔,通过该ct系统可以得到口腔牙齿的ct数据。
48.另外,在旋转平台300上可以设置座椅500、头部支撑部600、和头部支撑架610,并且被测者可以坐在该座椅500上,并且将头部靠在头部支撑部600上,而且头部支撑部600可以与头部支撑架610相连接,并且头部支撑架610可以固定至旋转平台上。当旋转平台300进行转动时,将带动座椅500进行转动,并且坐在座椅500上的被测者也相应地进行转动。
49.与射源、探测器进行转动以进行拍摄的现有技术相比,本公开的ct系统结构紧凑并且设备安装要求较低。系统的旋转通过被测对象的旋转来实现,旋转半径大大减小并且所要求的旋转力矩也同步降低,同时可以实现超长的射源探测器距离,大大降低cbct的锥形束伪影和有效增加fov。
50.在本公开中,探测器和射源可以独立安装或者根据应用需要可变装配。而且射源和探测器位置固定可以更方便布线和装配。
51.根据本公开实施方式的ct系统还包括旋转驱动装置,旋转驱动装置控制旋转平台的旋转。
52.图2示出了根据本公开的一个实施例的旋转驱动装置700。旋转驱动装置700用于控制旋转平台300进行旋转。
53.如图2所示,旋转驱动装置700可以包括旋转支撑部710和驱动齿轮720。
54.旋转支撑部710与旋转平台300可转动连接,以便旋转平台300能够相对于旋转支撑部710进行转动。
55.驱动齿轮720的轮齿与旋转支撑部710所设置的轮齿相啮合,并且驱动齿轮720相对于旋转平台300固定配置,从而通过驱动齿轮720的驱动来使得旋转平台300进行转动。
56.旋转支撑部710可以包括外环件711、内环件712、滚动体等。
57.外环件711与ct系统的固定底座400固定连接,例如可以通过螺栓连接将外环件711固定连接至固定底座400。可以在外环件711上设置有一组贯穿其厚度方向的通孔,并且该通孔可以分别与固定底座400上设置的螺纹孔相对齐,穿过通孔拧入螺栓并进行固定,从
而将外环件711固定至固定底座400。
58.内环件712位于外环件711的内侧,并且内环件712相对于外环件711为可转动的形式。转动平台200可以连接至内环件712上,例如可以连接至内环件712的外周位置或者中心位置,例如内环件712为环状形式时,转动平台200与内环件712的外周位置固定连接,例如内环件712可以为圆板的形状,并且转动平台200固定至该圆板的圆心位置处。
59.内环件712与外环件711之间设置有滚动体,例如滚珠。
60.旋转支撑部710可以为轴承的形式,并且其能够同时承受较大的轴向、径向负荷和倾覆力矩。
61.外环件711的外周设置有与驱动齿轮720的轮齿相啮合的轮齿,驱动齿轮720能够绕外环件711进行转动,从而带动旋转平台300及内环件712相对于外环件711进行转动。这样当外环件711的轮齿与驱动齿轮720的轮齿相互啮合,这样可以形成动力传递。
62.驱动齿轮720的轮齿数量少于外环件711所设置的轮齿的数量。这样齿轮的传动可以为减速传动。
63.此外旋转驱动装置还包括驱动电机730,驱动电机730的电机轴相对于驱动齿轮720固定连接,以便通过电机轴的转动带动驱动齿轮720的转动。驱动电机730的电机轴固定设置在驱动齿轮720的内孔,并且使得驱动齿轮720不相对于电机轴进行转动。
64.旋转驱动装置还包括电机法兰740,驱动电机730固定安装至电机法兰740,并且电机法兰740与旋转平台300固定连接,以使得驱动齿轮720相对于旋转平台300固定配置。
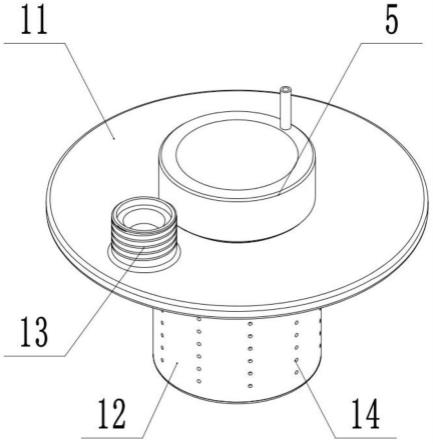
65.图3示出了根据本公开的ct系统的局部剖视图。
66.固定底座400可以为盘装结构,底面可以具有多个底脚410,底脚410设置在ct系统的最底部,ct系统安装时被置放于平整地面上,通过底脚410对ct系统进行支撑。固定底座400在圆周方向上布置一组螺纹孔,以便固定外环件711。
67.旋转支撑部710可以为能够承受综合载荷的大型轴承,其主要由外环件711、内环件712和滚动件713等组成。外环件711和内环件712可以作相对转动。旋转支撑部710位于固定底座400的上方,外环件711的底部端面与固定底座400的上平面配合定位,外环件711上有一组贯穿厚度方向的通孔,将通孔与固定底座400上的螺纹孔对齐,拧入螺栓810并固定。
68.旋转平台400位于旋转支撑部710的上方,并与旋转支撑部710的内环件712配合接触,采用螺栓820连接固定。
69.电机法兰740为沉孔式的回转体结构,位于旋转平台300的法兰孔中,轴向上电机法兰740的台阶面741与旋转平台300的上平面配合定位,并采用螺栓830连接固定台阶面741与旋转平台300的上平面。
70.驱动电机730可以为步进电机,安装于电机法兰740上,驱动电机730的输出轴穿过电机法兰740上的孔,并采用螺栓连接固定好。
71.驱动齿轮720通过内孔721穿入驱动电机730的输出轴731上,圆周方向上通过插入平键722进行定位,轴向通过轴端垫片723压在驱动齿轮720的末端端面上,螺钉穿过轴端垫片723上的孔,再旋入驱动电机730的输出轴上的螺纹孔中,拧紧螺钉,保证驱动齿轮720在轴向上无位移。
72.驱动齿轮720与旋转支撑部710的外环件711的轮齿相互啮合,形成动力传递。
73.驱动电机730通电启动后,驱动电机730的输出轴731输出扭矩,驱动齿轮720旋转,
由于旋转支撑部710的外环件711与固定底座400连接而形成固定件,经过啮合传动,驱动齿轮720围绕旋转支撑部710的外环件711的轴线进行公转。由于驱动齿轮720与驱动电机730和旋转平台300为一相对固定的联合组件,即驱动齿轮720在绕轴线公转的同时带动该联合组件进行公转。由此,安装于旋转平台300上的各机构组件可实现围绕旋转支撑轴线的回转运动。
74.综上,通过上述方式在固定底座400上安装旋转平台300,可带动座椅360度转动,实现基于被测对象旋转的ct系统。
75.在本公开中,虽然以驱动齿轮的形式说明驱动部件,但是本领域的技术人员应当理解,也可以采用其他方式的驱动部件,例如可以采用链条驱动等。另外,虽然在本公开中描述了驱动部件与旋转支撑部相互作用,来使得旋转平台进行旋转。但是应当理解,其也可以采用其他方式等。例如,可以将驱动部件等固定至底座,并且通过驱动部件直接驱动旋转平台,其可以采用现有的合适驱动方式。例如可以将电机固定至底座中,并且通过与电机轴固定的齿轮来驱动旋转平台(例如旋转平台上也可以设置相应的轮齿)。
76.根据本公开的落地式锥形束ct系统,为克服现有中空回转装置存在的技术局限以及基于射源和探测器旋转的装置存在的成本、体积等局限,本公开旨在为基于固定射源和探测器的落地式锥形束ct系统提供一种新的回转运动的解决方案,其具有转动平稳、控制精度高、结够简单、体积小等优点。
77.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
78.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
79.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。