1.本发明涉及可见光室内定位领域,具体涉及一种基于改进鲸鱼算法的可见光室内定位系统及其方法。
背景技术:
2.随着室内环境复杂度的增加,人们对位置信息的需求越来越高。全球定位系统(gps)的定位技术在室外定位中已经趋于成熟,但是室内环境中无线电信号被建筑物阻挡,使得接收信号较弱,从而导致定位精度不能满足室内标准,因此gps等卫星定位技术难以适用于室内环境。目前常见的室内定位技术有超声波定位技术、红外定位技术、无线局域网(wifi)定位技术和蓝牙定位技术等。超声波定位技术根据回波与发射波之间的时间差进行测距,具有很高的定位精度,但是需要在空间布置大量的测量设备,定位成本较高;蓝牙定位技术通过测量接收信号的强度进行定位,适合短距离、小范围定位,但是稳定性差;wifi定位技术通过测量用户到无线热点的距离进行定位,易受其他信号的干扰,而且定位器的能耗也比较高;红外定位技术的定位精度高,但是传播距离短、系统成本较高,因此发展受到一定的限制。
3.可见光室内定位是利用led灯发出高速明暗闪烁的信号来传递信息,通过微控单元将存储的坐标位置数据快速编码成led光信息,通过接收端的光电器件接收信号并将光信号转化为电信号,最后对解调出的数据进行计算并给出接收机的实际位置。针对由于室内照度不均匀导致的通信性能不均衡问题,目前用于优化led布局,用到遗传算法,粒子群算法,蝙蝠算法,目前提出新型的启发算法——鲸鱼优化算法。研究表明鲸鱼算法(woa)算法在收敛速度和全局寻优能力方面,明显优于ga算法、粒子群算法等一些智能优化算法。
技术实现要素:
4.本发明的目的在于提供一种基于改进鲸鱼算法的可见光室内定位系统及方法,以解决上述背景技术中提出的问题。
5.为实现上诉目的,本发明提供如下技术方案:一种基于改进鲸鱼算法的可见光室内定位系统及方法,包括如下步骤:
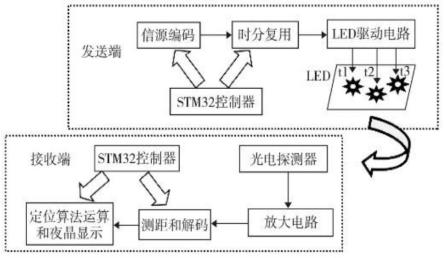
6.s1:可见光收发模型构建;
7.s2:rssi及三点定位接收处理;
8.s3:构建改进鲸鱼算法模型,改进控制参数递减策略调整搜索步长,采用的随机差分变异策略对群体进行变异扰动,产生较好的多样性个体,避免算法陷入局部最优,防止早熟现象的发生,提高算法收敛精度;
9.所述步骤s1具体包括以下步骤:
10.s1.1:发送端是采用stm32单片机作为控制芯片构成的微控电路;
11.s1.2:单片机对led的id进行脉宽编码,然后经过时分复用发送给驱动电路放大,驱动led发送光信号;
12.s1.3:接收端,探测器把接收到的光信号送给放大电路进行放大,然后送至单片机a/d端口进行解码与测压;
13.所述步骤s2中通过rrsi及三点定位算法对接收信号进行处理,具体定义如下:
14.基于rssi的三点定位算法,是已知三个点的坐标和未知点到这三个点的rssi的信号值,求解未知点的坐标。首先是将rssi信号转换为距离:
15.d=10^((abs(rssi)-a)/(10*n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
16.其中d为距离,单位是m。rssi为rssi信号强度,为负数。a为距离探测设备1m时的rssi值得绝对值,最佳范围在45-49之间。n为环境衰减因子,需要测试矫正,最佳范围在3.25-4.5之间。
17.在获取未知点到三个点的距离后,剩下的就是求解未知点坐标。平面上有三个不共发送端的空间坐标为o1(a1,b1,c1)、o2(a2,b2,c2)和o3(a3,b3,c3);接收端p到投影点的距离线的基站a,b,c,和一个未知终端d,并已测出三个基站到终端d的距离分别为r1,r2,r3,则以三个基站坐标为圆心,三基站到未知终端距离为半径可以画出三个相交的圆假设:给定3个分别为d1、d2、d3,则可根据空间坐标几何关系列出多组距离公式,从而得到接收端p(x,y,z)的估计坐标点。
18.(a1-x)^2 (b1-y)^2 (c1-z)^2=r1^2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
19.(a2-x)^2 (b2-y)^2 (c2-z)^2=r2^2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
20.(a3-x)^2 (b3-y)^2 (c3-z)^2=r3^2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
21.所述步骤s3改进鲸鱼算法模型构建,具体步骤如下:
22.s3.1:包围猎物:座头鲸识别猎物位置并将他们包围起来,由于搜索空间中的最优位置不是事先已知的,因此woa算法假设当前最优个体位置为目标猎物,其他个体位置以不断靠近猎物的方式进行位置更新,表示如下:
23.x
→
t
1=x
→
best-a
×
|c
×
x
→
best-x
→
t
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
24.a=2ar-a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
25.c=2r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
26.a=2-2t/t
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
27.式中,t为当前迭代次数,x
→
best
为当前最优位置,x
→
t
为其他鲸鱼个体位置,a和c为随机参数,a为控制参数,在整个迭代过程中线性地从2减小到0,r是[0,1]区间的随机数,t
max
为最大迭代次数。
[0028]
s3.2:螺线捕食:鲸鱼吐出气泡并以螺线运动轨迹向最优个体(猎物)游去,其位置更新如下式:
[0029]
x
→
t 1
=d
→
best
×ebl
×
cos(2πl) x
→
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0030]d→
best
=|x
→
best-x
→
t
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0031]
式中,d
→
best
表示当前个体与猎物之间的距离,b为决定螺线形状的常数,l为[-1,1]区间的随机数。
[0032]
s3.3:搜寻猎物:从当前种群中随机地选取一个鲸鱼个体位置(xrand)作导航来寻觅猎物,其位置更新如下式:
[0033]
x
→
t 1
=x
→
rand-a
×
|c
×
x
→
rand-x
→
t
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0034]
改进鲸鱼优化算法:改进控制参数递减策略调整搜索步长。在woa中,a的取值决定
算法全局搜索能力和局部开发能力之间的转换,即收敛因子a的取值变化决定算法寻优质量。但在迭代过程中a是线性递减的,不能适应实际的寻优过程,对a采用一种新的非线性指数递减方式:
[0035]
a=2-2(1/(e-1)
×
(e
t/tmax-1))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0036]
随机差分变异策略:由式(5)和式(9)可知,在woa算法中,种群中其他鲸鱼个体由当前最优个体x
→
best
引导逐渐向最优区域靠近。如果x
→
best
是局部最优解,随着迭代次数的增加,群体均聚集在最优解周围,导致群体多样性损失,算法出现早熟现象。采用随机差分变异策略,利用当前最优个体和随机个体进行随机差分对群体进行变异扰动。
[0037]
x
→
t 1
=r
×
(x
→
best-x
→
t
) r
×
(x
→
rand-x
→
t
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0038]
式中,r为分布在[0,1]之间的随机数。在woa的每次迭代中,采用式(13)表示的随机差分变异策略对群体进行变异扰动,产生较好的多样性个体,避免算法陷入局部最优,防止早熟现象的发生,提高算法收敛精度。
附图说明
[0039]
图1为本发明的可见光收发模型示意图。
[0040]
图2为本发明可见光定位图。
[0041]
图3为本发明中一种基于改进鲸鱼算法流程图。
具体实施方式
[0042]
实施例:
[0043]
本发明提供如下技术方案:一种基于改进鲸鱼算法的可见光室内定位系统及方法,包括如下步骤:
[0044]
s1:可见光收发模型构建;
[0045]
s2:rssi及三点定位接收处理;
[0046]
s3:构建改进鲸鱼算法模型,改进控制参数递减策略调整搜索步长,采用的随机差分变异策略对群体进行变异扰动,产生较好的多样性个体,避免算法陷入局部最优,防止早熟现象的发生,提高算法收敛精度;
[0047]
所述步骤s1具体包括以下步骤:
[0048]
s1.1:发送端是采用stm32单片机作为控制芯片构成的微控电路;
[0049]
s1.2:单片机对led的id进行脉宽编码,然后经过时分复用发送给驱动电路放大,驱动led发送光信号;
[0050]
s1.3:接收端,探测器把接收到的光信号送给放大电路进行放大,然后送至单片机a/d端口进行解码与测压;
[0051]
所述步骤s2中通过rrsi及三点定位算法对接收信号进行处理,具体定义如下:
[0052]
基于rssi的三点定位算法,是已知三个点的坐标和未知点到这三个点的rssi的信号值,求解未知点的坐标。首先是将rssi信号转换为距离:
[0053]
d=10^((abs(rssi)-a)/(10*n)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0054]
其中d为距离,单位是m。rssi为rssi信号强度,为负数。a为距离探测设备1m时的rssi值得绝对值,最佳范围在45-49之间。n为环境衰减因子,需要测试矫正,最佳范围在
3.25-4.5之间。
[0055]
在获取未知点到三个点的距离后,剩下的就是求解未知点坐标。平面上有三个不共发送端的空间坐标为o1(a1,b1,c1)、o2(a2,b2,c2)和o3(a3,b3,c3);接收端p到投影点的距离线的基站a,b,c,和一个未知终端d,并已测出三个基站到终端d的距离分别为r1,r2,r3,则以三个基站坐标为圆心,三基站到未知终端距离为半径可以画出三个相交的圆假设:给定3个分别为d1、d2、d3,则可根据空间坐标几何关系列出多组距离公式,从而得到接收端p(x,y,z)的估计坐标点。
[0056]
(a1-x)^2 (b1-y)^2 (c1-z)^2=r1^2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0057]
(a2-x)^2 (b2-y)^2 (c2-z)^2=r2^2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0058]
(a3-x)^2 (b3-y)^2 (c3-z)^2=r3^2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0059]
所述步骤s3改进鲸鱼算法模型构建,具体步骤如下:
[0060]
s3.1:包围猎物:座头鲸识别猎物位置并将他们包围起来,由于搜索空间中的最优位置不是事先已知的,因此woa算法假设当前最优个体位置为目标猎物,其他个体位置以不断靠近猎物的方式进行位置更新,表示如下:
[0061]
x
→
t
1=x
→
best-a
×
|c
×
x
→
best-x
→
t
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0062]
a=2ar-a
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0063]
c=2r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0064]
a=2-2t/t
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0065]
式中,t为当前迭代次数,x
→
best
为当前最优位置,x
→
t
为其他鲸鱼个体位置,a和c为随机参数,a为控制参数,在整个迭代过程中线性地从2减小到0,r是[0,1]区间的随机数,t
max
为最大迭代次数。
[0066]
s3.2:螺线捕食:鲸鱼吐出气泡并以螺线运动轨迹向最优个体(猎物)游去,其位置更新如下式:
[0067]
x
→
t 1
=d
→
best
×ebl
×
cos(2πl) x
→
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0068]d→
best
=|x
→
best-x
→
t
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0069]
式中,d
→
best
表示当前个体与猎物之间的距离,b为决定螺线形状的常数,l为[-1,1]区间的随机数。
[0070]
s3.3:搜寻猎物:从当前种群中随机地选取一个鲸鱼个体位置(x
rand
)作导航来寻觅猎物,其位置更新如下式:
[0071]
x
→
t 1
=x
→
rand-a
×
|c
×
x
→
rand-x
→
t
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0072]
改进鲸鱼优化算法:改进控制参数递减策略调整搜索步长。在woa中,a的取值决定算法全局搜索能力和局部开发能力之间的转换,即收敛因子a的取值变化决定算法寻优质量。但在迭代过程中a是线性递减的,不能适应实际的寻优过程,对a采用一种新的非线性指数递减方式:
[0073]
a=2-2(1/(e-1)
×
(e
t/tmax-1))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0074]
随机差分变异策略:由式(5)和式(9)可知,在woa算法中,种群中其他鲸鱼个体由当前最优个体x
→
best
引导逐渐向最优区域靠近。如果x
→
best
是局部最优解,随着迭代次数的增加,群体均聚集在最优解周围,导致群体多样性损失,算法出现早熟现象。采用随机差分变异策略,利用当前最优个体和随机个体进行随机差分对群体进行变异扰动。
[0075]
x
→
t 1
=r
×
(x
→
best-x
→
t
) r
×
(x
→
rand-x
→
t
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0076]
式中,r为分布在[0,1]之间的随机数。在woa的每次迭代中,采用式(13)表示的随机差分变异策略对群体进行变异扰动,产生较好的多样性个体,避免算法陷入局部最优,防止早熟现象的发生,提高算法收敛精度。
[0077]
综上,本发明提出了一种基于改进鲸鱼算法的可见光室内定位系统及方法,首先,以室内照度均匀度为目标函数,迭代优化得到led布局;其次,根据优化后的布局,对室内光照度、接收功率、误码率进行仿真分析。改进鲸鱼算法流程图算法学习图如图3所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。