1.本发明涉及物联网技术领域,具体为一种基于物联网平台可自动调整位置的幼儿园床。
背景技术:
2.物联网是基于互联网、传统电信网等信息承载体,让所有能行使独立功能的普通物体实现互联互通的网络,随着对幼儿教育的不断重视,幼儿园的基础设施也在不断完善过程中,其中将各种基础设施与物联网连通,使得幼儿园的基础设施越来越趋向于智能化的方向。
3.现有的幼儿园床主要存在如下技术缺陷:其一、为了节约幼儿园的活动空间,传统的幼儿园床在闲置时需要将幼儿园床进行集中收集,在使用时再依次摆放,其摆放与收集方式主要通过人工进行,从而造成需要消耗人力资源的问题;其二、若采用将幼儿园床连通物联网,通过物联网发出指令对幼儿园床的位置进行自动化调整,但是在对幼儿园床位置进行移动的过程中,幼儿园床的移动速度无法得到匀速的控制,进而存在因幼儿园床移动速度过快,幼儿园床发生撞击或倾倒的情形,从而造成容易损害床体的问题。
技术实现要素:
4.本发明的目的在于提供一种基于物联网平台可自动调整位置的幼儿园床,以解决背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于物联网平台可自动调整位置的幼儿园床,包括导轨,所述导轨上侧设置有传感装置,所述传感装置上固定安装有运动装置、控制装置和检测装置;
6.所述传感装置包括床体、连接块、红外传感器和反射板,所述导轨的上侧设置有床体,所述床体的右部下侧固定连接有连接块,所述连接块上固定安装有红外传感器,所述床体的左部下侧固定安装有反射板。
7.进一步的,所述运动装置包括固定块、导向环、磁力块和动力装置,所述床体的下侧且位于床体中部位置固定安装有固定块,所述固定块关于床体前后两侧对称设置,所述固定块的内侧滑动连接有导向环,所述固定块上开设有与导向环相对应的环形槽,所述导向环靠近床体中心位置的一侧通过圆柱杆固定连接有磁力块,所述磁力块的外侧设置有动力装置。
8.进一步的,所述动力装置的结构包括第一线圈、铁芯和转动套,所述磁力块关于导向环轴向的外侧固定连接有转动套,所述磁力块关于转动套轴向的内侧设置有铁芯,所述磁力块围绕铁芯做圆周运动,所述铁芯上缠绕有整圈的第一线圈。
9.工作人员通过外置遥控装置设定床体之间的间距,然后物联网根据设定的间距信息发出指令控制红外传感器发出相对应的红外线频率,在红外传感器启动发射红外线后,红外线照射到反射板后反射回来,然后红外传感器控制对第一线圈的内部通入电流方向不
断变化的电流,在第一线圈通入电流后产生驱使磁力块围绕铁芯做圆周转动的磁场力,使得磁力块带动与其固定连接的转动套沿导轨进行转动,然后带动床体进行移动,当床体移动指定距离后,红外传感器控制第一线圈的内部断电,进而实现了根据物联网可以自动化的调整幼儿园床位置的目的。
10.进一步的,所述控制装置包括连接板、滚动轮、圆形板和限制装置,所述床体的下侧固定安装有连接板,所述连接板的内侧转动连接有滚动轮,所述滚动轮的内部中心位置固定连接有圆形板,所述滚动轮的内部设置有限制装置。
11.进一步的,所述限制装置的结构包括第二线圈、第一弹簧、磁力杆、l形板和限制环,所述圆形板的前后两侧均固定连接有第二线圈、l形板,所述第二线圈、l形板关于圆形板的轴向呈均匀分布,所述第二线圈远离圆形板的一侧设置有磁力杆,所述磁力杆贯穿l形板,所述磁力杆远离圆形板的一侧固定连接有限制环,所述磁力杆的轴向外侧套接有第一弹簧。
12.床体未进行运动时,物联网对第二线圈的内部通入强电流,使得第二线圈通入电流后产生与磁力杆相斥的磁场力,使得磁力杆压缩第一弹簧,同时磁力杆带动与其固定连接的限制环向滚动轮的外侧运动与导轨上开设的凹槽相强力接触,进而实现了对床体进行有效固定的目的,在床体进行运动时,由于第二线圈与滑动变阻器为电性连接,使得通入第二线圈内部的电流大小与滑动变阻器内部的阻值大小呈反向关系,进而实现了限制环对导轨的接触力大小与床体运动的速度大小呈正向的关系,从而达到了可以控制床体匀速运动的效果。
13.进一步的,所述检测装置包括安装块、风筒、转动座、扇叶杆和电器装置,所述导轨的下侧连接有安装块,所述安装块的下侧固定连接有风筒,所述风筒的轴向内侧通过矩形块固定连接有转动座,所述转动座的右侧转动连接有扇叶杆,所述扇叶杆的内部设置有电器装置。
14.进一步的,所述电器装置的结构包括运动框、滑动变阻器、拨块和第二弹簧,所述扇叶杆的内部开设有运动框,所述运动框的内部固定连接有滑动变阻器,所述滑动变阻器关于扇叶杆轴向的内侧设置有拨块,所述拨块在滑动变阻器上滑动,所述拨块与运动框之间固定连接有第二弹簧,所述滑动变阻器与第二线圈为电性连接。
15.在床体进行移动调整的同时,通过气流快速流动的作用,带动扇叶杆进行转动,扇叶杆在转动时所产生的离心力带动拨块压缩第二弹簧在滑动变阻器上滑动,进而改变滑动变阻器内部的阻值,使得滑动距离越长,滑动变阻器内部的阻值越小,同时床体运动的速度大小与扇叶杆转速大小呈正向关系,即床体运动的速度大小与滑动变阻器内部阻值的大小呈反向关系,从而达到了可以根据风筒内部阻值变化的大小间接得出床体运动速度变化的目的。
16.进一步的,所述导轨上开设有与转动套、滚动轮相对应的凹槽,所述连接板上开设有与限制环相对应的开槽,所述第一线圈与红外传感器为电性连接。
17.与现有技术相比,本发明提供了一种基于物联网平台可自动调整位置的幼儿园床,具备以下有益效果:
18.1、该基于物联网平台可自动调整位置的幼儿园床,通过床体、红外传感器、反射板、第一线圈、磁力块、铁芯和导轨之间的配合作用,进而实现了根据物联网可以自动化的
调整幼儿园床位置的目的,从而解决了为了节约幼儿园的活动空间,传统的幼儿园床在闲置时需要将幼儿园床进行集中收集,在使用时再依次摆放,其摆放与收集方式主要通过人工进行,从而造成需要消耗人力资源的问题。
19.2、该基于物联网平台可自动调整位置的幼儿园床,通过扇叶杆、拨块、第二弹簧和滑动变阻器之间的配合作用,从而达到了可以根据风筒内部阻值变化的大小间接得出床体运动速度变化的目的。
20.3、该基于物联网平台可自动调整位置的幼儿园床,通过第二线圈、磁力杆、第一弹簧、限制环、滚动轮、导轨和滑动变阻器之间的配合作用,进而实现了限制环对导轨的接触力大小与床体运动的速度大小呈正向的关系,从而达到了可以控制床体匀速运动的效果从而解决了若采用将幼儿园床连通物联网,通过物联网发出指令对幼儿园床的位置进行自动化调整,但是在对幼儿园床位置进行移动的过程中,幼儿园床的移动速度无法得到匀速的控制,进而存在因幼儿园床移动速度过快,幼儿园床发生撞击或倾倒的情形,从而造成容易损害床体的问题。
附图说明
21.图1为本发明立体结构示意图;
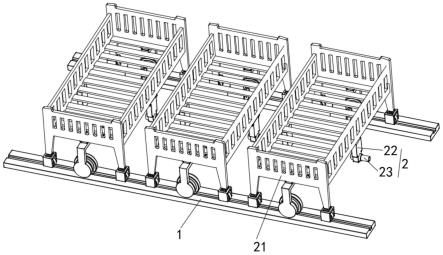
22.图2为本发明床体的立体结构示意图;
23.图3为本发明固定块的立体结构示意图;
24.图4为本发明运动装置的立体结构示意图;
25.图5为本发明固定块的剖切立体结构示意图;
26.图6为本发明滚动轮的立体结构示意图;
27.图7为本发明限制装置的立体结构示意图;
28.图8为本发明检测装置的立体结构示意图;
29.图9为本发明扇叶杆的平面结构示意图;
30.图10为本发明图9中a处的放大示意图。
31.图中:1、导轨;2、传感装置;21、床体;22、连接块;23、红外传感器;24、反射板;3、运动装置;31、固定块;32、导向环;33、磁力块;34、动力装置;341、第一线圈;342、铁芯;343、转动套;4、控制装置;41、连接板;42、滚动轮;43、圆形板;44、限制装置;441、第二线圈;442、第一弹簧;443、磁力杆;444、l形板;445、限制环;5、检测装置;51、安装块;52、风筒;53、转动座;54、扇叶杆;55、电器装置;551、运动框;552、滑动变阻器;553、拨块;554、第二弹簧。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例
34.请参阅图1-图10,一种基于物联网平台可自动调整位置的幼儿园床,包括导轨1,导轨1上侧设置有传感装置2,传感装置2上固定安装有运动装置3、控制装置4和检测装置5;
35.传感装置2包括床体21、连接块22、红外传感器23和反射板24,导轨1的上侧设置有床体21,床体21的右部下侧固定连接有连接块22,连接块22上固定安装有红外传感器23,床体21的左部下侧固定安装有反射板24。
36.进一步的,运动装置3包括固定块31、导向环32、磁力块33和动力装置34,床体21的下侧且位于床体21中部位置固定安装有固定块31,固定块31关于床体21前后两侧对称设置,固定块31的内侧滑动连接有导向环32,固定块31上开设有与导向环32相对应的环形槽,导向环32靠近床体21中心位置的一侧通过圆柱杆固定连接有磁力块33,磁力块33的外侧设置有动力装置34。
37.进一步的,动力装置34的结构包括第一线圈341、铁芯342和转动套343,磁力块33关于导向环32轴向的外侧固定连接有转动套343,磁力块33关于转动套343轴向的内侧设置有铁芯342,磁力块33围绕铁芯342做圆周运动,铁芯342上缠绕有整圈的第一线圈341。
38.工作人员通过外置遥控装置设定床体21之间的间距,然后物联网根据设定的间距信息发出指令控制红外传感器23发出相对应的红外线频率,在红外传感器23启动发射红外线后,红外线照射到反射板24后反射回来,然后红外传感器23控制对第一线圈341的内部通入电流方向不断变化的电流,在第一线圈341通入电流后产生驱使磁力块33围绕铁芯342做圆周转动的磁场力,使得磁力块33带动与其固定连接的转动套343沿导轨1进行转动,然后带动床体21进行移动,当床体21移动指定距离后,红外传感器23控制第一线圈341的内部断电,进而实现了根据物联网可以自动化的调整幼儿园床位置的目的。
39.进一步的,控制装置4包括连接板41、滚动轮42、圆形板43和限制装置44,床体21的下侧固定安装有连接板41,连接板41的内侧转动连接有滚动轮42,滚动轮42的内部中心位置固定连接有圆形板43,滚动轮42的内部设置有限制装置44。
40.进一步的,限制装置44的结构包括第二线圈441、第一弹簧442、磁力杆443、l形板444和限制环445,圆形板43的前后两侧均固定连接有第二线圈441、l形板444,第二线圈441、l形板444关于圆形板43的轴向呈均匀分布,第二线圈441远离圆形板43的一侧设置有磁力杆443,磁力杆443贯穿l形板444,磁力杆443远离圆形板43的一侧固定连接有限制环445,磁力杆443的轴向外侧套接有第一弹簧442。
41.床体21未进行运动时,物联网对第二线圈441的内部通入强电流,使得第二线圈441通入电流后产生与磁力杆443相斥的磁场力,使得磁力杆443压缩第一弹簧442,同时磁力杆443带动与其固定连接的限制环445向连接板41的外侧运动与导轨1上开设的凹槽相强力接触,进而实现了对床体21进行有效固定的目的,在床体21进行运动时,由于第二线圈441与滑动变阻器552为电性连接,使得通入第二线圈441内部的电流大小与滑动变阻器552内部的阻值大小呈反向关系,进而实现了限制环445对导轨1的接触力大小与床体21运动的速度大小呈正向的关系,从而达到了可以控制床体21匀速运动的效果。
42.进一步的,检测装置5包括安装块51、风筒52、转动座53、扇叶杆54和电器装置55,导轨1的下侧连接有安装块51,安装块51的下侧固定连接有风筒52,风筒52的轴向内侧通过矩形块固定连接有转动座53,转动座53的右侧转动连接有扇叶杆54,扇叶杆54的内部设置有电器装置55。
43.进一步的,电器装置55的结构包括运动框551、滑动变阻器552、拨块553和第二弹簧554,扇叶杆54的内部开设有运动框551,运动框551的内部固定连接有滑动变阻器552,滑
动变阻器552关于扇叶杆54轴向的内侧设置有拨块553,拨块553在滑动变阻器552上滑动,拨块553与运动框551之间固定连接有第二弹簧554,滑动变阻器552与第二线圈441为电性连接。
44.在床体21进行移动调整的同时,通过气流快速流动的作用,带动扇叶杆54进行转动,扇叶杆54在转动时所产生的离心力带动拨块553压缩第二弹簧554在滑动变阻器552上滑动,进而改变滑动变阻器552内部的阻值,使得滑动距离越长,滑动变阻器552内部的阻值越小,同时床体21运动的速度大小与扇叶杆54转速大小呈正向关系,即床体21运动的速度大小与滑动变阻器552内部阻值的大小呈反向关系,从而达到了可以根据风筒52内部阻值变化的大小间接得出床体21运动速度变化的目的。
45.进一步的,导轨1上开设有与转动套343、滚动轮42相对应的凹槽,连接板41上开设有与限制环445相对应的开槽,第一线圈341与红外传感器23为电性连接。
46.本实施例的具体使用方式与作用:
47.使用时,首先工作人员通过外置遥控装置设定床体21之间的间距,然后物联网根据设定的间距信息发出指令控制红外传感器23发出相对应的红外线频率,在红外传感器23启动发射红外线后,红外线照射到反射板24后反射回来,然后红外传感器23控制对第一线圈341的内部通入电流方向不断变化的电流,在第一线圈341通入电流后产生驱使磁力块33围绕铁芯342做圆周转动的磁场力,使得磁力块33带动与其固定连接的转动套343沿导轨1进行转动,然后带动床体21进行移动,当床体21移动指定距离后,红外传感器23控制第一线圈341的内部断电,进而实现了根据物联网可以自动化的调整幼儿园床位置的目的。
48.进一步的,在床体21进行移动调整的同时,通过气流快速流动的作用,带动扇叶杆54进行转动,扇叶杆54在转动时所产生的离心力带动拨块553压缩第二弹簧554在滑动变阻器552上滑动,进而改变滑动变阻器552内部的阻值,使得滑动距离越长,滑动变阻器552内部的阻值越小,同时床体21运动的速度大小与扇叶杆54转速大小呈正向关系,即床体21运动的速度大小与滑动变阻器552内部阻值的大小呈反向关系,从而达到了可以根据风筒52内部阻值变化的大小间接得出床体21运动速度变化的目的。
49.进一步的,床体21未进行运动时,物联网对第二线圈441的内部通入强电流,使得第二线圈441通入电流后产生与磁力杆443相斥的磁场力,使得磁力杆443压缩第一弹簧442,同时磁力杆443带动与其固定连接的限制环445向滚动轮42的外侧运动与导轨1上开设的凹槽相强力接触,进而实现了对床体21进行有效固定的目的,在床体21进行运动时,由于第二线圈441与滑动变阻器552为电性连接,使得通入第二线圈441内部的电流大小与滑动变阻器552内部的阻值大小呈反向关系,进而实现了限制环445对导轨1的接触力大小与床体21运动的速度大小呈正向的关系,从而达到了可以控制床体21匀速运动的效果。
50.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。