1.本公开属于柔性传感器技术领域,具体涉及一种柔性电容传感器及其制备方法。
背景技术:
2.柔性压力传感器是未来人机交互,人体运动监测,电子皮肤和软体机器人的重要组件之一,目前,压力传感器按照传感机理可分为压阻,电容,压电和摩擦电等不同类型。将压力信号转变为电容信号的电容传感器通常是由上下两电极和中间介电层的三明治结构组成。虽然电容压力传感器具有结构简单和高漂移稳定性的特点,但是该传感器的检测范围有限或者在高压下极易饱和。传统的电容传感器通常使用实心中介层,导致整个传感器不仅灵敏度低而且响应速度缓慢。因此,在传感器电极和中介层上制备微结构已经被证明是一种能够提高灵敏度和响应速度的有效方式。这些微结构包括微金字塔阵列,微圆柱阵列以及诸如树叶图案的仿生结构。虽然这些微结构给电容压力传感器提供了一种新的性能提高方式,但是对于微米尺度甚至是纳米尺度微结构的加工仍然具有不少的挑战。采用一些低弹性模量的材料比如海绵,虽然能够增加电容压力传感器在低压下的灵敏度,但是压力检测范围仍然比较低。除此以外,之前大多数报道的压力传感器局限于单一功能,比如应变传感或者应力传感,具有简单结构的接近觉应力传感器在最近日益收获关注。
技术实现要素:
3.针对现有技术中的不足,本公开的目的在于提供一种柔性电容传感器及其制备方法,该柔性电容传感器同时具有接近觉和压力传感功能,且在压力传感的时候可以实现大小量程检测。
4.为实现上述目的,本公开提供以下技术方案:
5.一种柔性电容传感器,包括:
6.第一电极层和第二电极层;
7.所述第一电极层和第二电极层均包括无尘纸,所述无尘纸上浸染有导电复合溶液;
8.所述第一电极层和第二电极层之间设置有介电层;
9.所述介电层包括弹性模量不同的第一弹性体和第二弹性体。
10.优选的,所述第一弹性体包括弹性模量大于0.49gpa且小于等于0.78gpa的发泡棉。
11.优选的,所述第二弹性体包括弹性模量大于等于0.000138gpa且小于等于0.49gpa的海绵。
12.优选的,所述导电复合溶液包括石墨烯复合溶液、多壁碳纳米管颗粒和聚氧化乙烯颗粒。
13.优选的,所述石墨烯复合溶液和多壁碳纳米管颗粒的质量比为1:0.25,所述聚氧化乙烯颗粒的质量为0.05g。
14.本公开还提供一种制备柔性电容传感器的方法,包括如下步骤:
15.s1:将清洗后的无尘纸在导电复合溶液中浸染,将浸染后的无尘纸干燥,以获得第一电极层和第二电极层;
16.s2:将第一弹性体和第二弹性体清洗、干燥;
17.s3:将干燥后的第一弹性体和第二弹性体进行拼接,以获得介电层;
18.s4:将第一电极层、介电层、第二电极层按顺序贴合,即获得柔性电容传感器。
19.优选的,步骤s2中,所述导电复合溶液的制备方法包括如下步骤:将质量比为1:0.25的石墨烯复合溶液和多壁碳纳米管颗粒与0.05g聚氧化乙烯颗粒混合后进行搅拌和破碎,以获得导电复合溶液。
20.优选的,搅拌温度为60℃,搅拌转速为1000r/min,搅拌时间为30min。
21.优选的,破碎采用超声破碎,破碎时间为30min。
22.与现有技术相比,本公开带来的有益效果为:
23.本公开采用弹性模量不同的弹性体拼接构成介电层,由于弹性模量不同且整体弹性模量较低,在相同的应力下不仅可以发生更大的形变而且可以适用于不同量程的压力检测。同时由于无尘纸电极表面的粗糙结构,还可以使得传感器具有接近觉检测功能。此外,在实现压力传感的过程中,还可以实现大小量程的检测。
附图说明
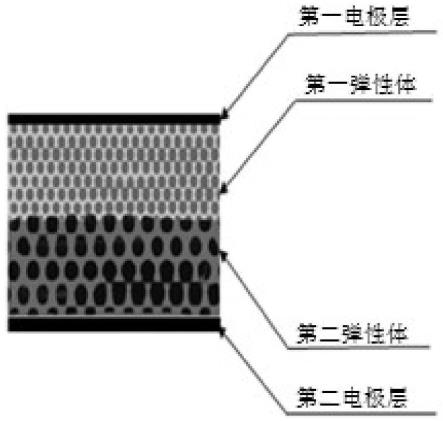
24.图1是本公开一个实施例提供的一种柔性电容传感器的结构示意图;
25.图2(a)是浸染前100μm尺度下的无尘纸结构sem图;
26.图2(b)是浸染前10μm尺度下的无尘纸结构sem图;
27.图2(c)是浸染前2μm尺度下的无尘纸结构sem图;
28.图2(d)是浸染后100μm尺度下的无尘纸结构sem图;
29.图2(e)是浸染后10μm尺度下的无尘纸结构sem图;
30.图2(f)是浸染后2μm尺度下的无尘纸结构sem图;
31.图2(g)是聚乙烯发泡棉100μm尺度下的sem图;
32.图2(h)是聚乙烯发泡棉10μm尺度下的sem图;
33.图2(i)是聚乙烯发泡棉2μm尺度下的sem图;
34.图3是本公开另一个实施例提供的导电复合溶液的性能电阻测试图;
35.图4是本公开另一个实施例提供的无尘纸电极制作流程示意图;
36.图5(a)为本公开另一个实施例提供的具有不同介电层的柔性电容传感器的电容灵敏度测试结果示意图;
37.图5(b)为本公开另一个实施例提供的在不同载荷下介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器的循环稳定性测试图;
38.图5(c)为本公开另一个实施例提供的在1n的载荷下介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器的响应时间测试图;
39.图5(d)为本公开另一个实施例提供的在5n的载荷下介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器的循环稳定性测试图;
40.图6(a)为本公开另一个实施例提供的介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡
棉的柔性电容传感器的接近觉灵敏度测试结果;
41.图6(b)为本公开另一个实施例提供的介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器在不同高度下的循环稳定性测试图;
42.图7(a)非接触式传感的人机交互界面图;
43.图7(b)接触式传感的人机交互界面图。
具体实施方式
44.下面将参照附图1至图7(b)详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
45.需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本公开的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本公开的范围。本公开的保护范围当视所附权利要求所界定者为准。
46.为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且各个附图并不构成对本公开实施例的限定。
47.一个实施例中,如图1所示,本公开提供一种柔性电容传感器,包括:
48.第一电极层和第二电极层,
49.所述第一电极层和第二电极层均包括无尘纸,所述无尘纸上浸染有导电复合溶液;
50.所述第一电极层和第二电极层之间设置有介电层,
51.所述介电层包括弹性模量不同的第一弹性体和第二弹性体。
52.上述实施例构成了本公开的完整技术方案。现有技术中,虽然采用低弹性模量海绵可以部分解决低压下灵敏度较低的问题,但是低弹性模量海绵在高压下容易饱和。本实施例通过将不同弹性模量的弹性体进行拼接作为介电层,能够实现压力传感时大小量程的检测。在进行压力传感时,当传感器受到压力,虽然第一弹性体和第二弹性体都会同时发生变形,但是由于二者弹性模量的不同,当压力比较小时,弹性模量低的弹性体变形量比较大,引起传感器电容改变,随着压力的增加,弹性模量比较低的弹性体受压变形会达到饱和,而弹性模量高的弹性体则可以继续变形并引起传感器电容的改变,从而使得传感器在进行压力传感时可以实现量程大小的检测。
53.另一个实施例中,所述第一弹性体包括弹性模量大于0.49gpa且小于等于0.78gpa的发泡棉。
54.本实施例中,符合以上弹性模量范围的发泡棉包括聚乙烯发泡棉、聚苯发泡棉等,其中,由于聚乙烯发泡棉具有回弹力度好以及重量轻的特点,尤其是在相同压力下相比第二弹性体可以继续变形,因此本实施例优选聚乙烯发泡棉作为第一弹性体。
55.另一个实施例中,所述第二弹性体包括弹性模量大于等于0.000138gpa且小于等于0.49gpa的海绵。
56.本实施例中,符合以上弹性模量范围的海绵包括各类聚氨酯海绵,其中,由于仿丝瓜聚氨酯海绵的回弹范围最广,容易受压变形且达到饱和状态,因此,本实施例优选仿丝瓜聚氨酯海绵作为第二弹性体。
57.另一个实施例中,所述导电复合溶液包括石墨烯复合溶液、多壁碳纳米管颗粒和聚氧化乙烯颗粒。
58.另一个实施例中,本公开还提供一种制备柔性电容传感器的方法,包括如下步骤:
59.s1:将无尘纸裁剪为10x10mm的尺寸,然后如图4所示,将剪裁好的无尘纸依次置于去离子水和无水乙醇中清洗20min,在导电复合溶液中浸染10min后挤干,然后置于60
°
的真空干燥箱中干燥1个小时,如此循环操作3-4次,以确保导电复合溶液能够完全浸染于无尘纸上,从而获得第一电极层和第二电极层;
60.该步骤中,图2(a)至图2(c)分别为浸染前不同尺度(依次为100μm、10μm、2μm)的无尘纸结构的sem图,由图2(a)至图2(c)所示,浸染前的无尘纸表面单根纤维表面光滑。图2(d)至图2(f)为浸染后不同尺度(依次为100μm、10μm、2μm)的无尘纸结构的sem图,由图2(d)至图2(f)所示,浸染后的无尘纸表面单根纤维上表面粗糙,由此能够证明导电复合溶液成功浸染在无尘纸表面。
61.s2:将聚乙烯发泡棉和仿丝瓜聚氨酯海绵置于去离子水中超声清洗20min,然后置于无水乙醇中清洗20min,最后置于60
°
真空干燥箱中干燥。
62.该步骤中,图2(g)至图2(i)表示不同尺度下(依次为100μm、10μm、2μm)的聚乙烯发泡棉sem图,由图2(g)至图2(i)可以看出,聚乙烯发泡棉的表面存在片状微结构,微结构的存在可以增加传感器两电极之间的接触面积,从而使得传感时电容值变化量增加,提高传感器的灵敏度。
63.需要说明的是,该步骤中的聚乙烯发泡棉和仿丝瓜聚氨酯海绵均从市场采购。
64.s3:将干燥后的聚乙烯发泡棉和仿丝瓜聚氨酯海绵用胶带进行拼接,以获得介电层;
65.该步骤中,聚乙烯发泡棉和仿丝瓜聚氨酯海绵的长度以及宽度均为10mm,厚度均为5mm(聚乙烯发泡棉和仿丝瓜聚氨酯海绵也可以选用不同的厚度,此处之所以都采用5mm厚度,只是便于同后续实施例进行比对)。
66.s4:将第一电极层、介电层、第二电极层按顺序贴合,制备得到柔性电容传感器。
67.该步骤中,第一电极层,介电层和第二电极层优选通过物理贴合的方式,并用3m胶带固定,制备得到柔性电容传感器。
68.另一个实施例中,步骤s1中,所述导电复合溶液的制备方法包括如下步骤:将质量比为1:0.25的石墨烯复合溶液和多壁碳纳米管颗粒与0.05g聚氧化乙烯颗粒混合后置于搅拌温度为60℃、搅拌转速为1000r/min的环境中搅拌30min,然后在超声破碎机中破碎30min,以获得导电复合溶液。
69.本实施例中,需要说明的是,石墨烯复合溶液和多壁碳纳米管颗粒采购自美国sigma-aldrich公司,石墨烯复合溶液中的石墨烯的质量分数为0.1%,多壁碳纳米管颗粒中的碳含量超过98%。聚氧化乙烯颗粒购于合肥巴斯夫有限公司,其中,聚氧化乙烯的摩尔
分子量为300000g/mol。
70.还需要说明的是,在制备导电复合溶液的过程中,之所以将石墨烯复合溶液和多壁碳纳米管颗粒的质量比设置为1:0.25以及将聚氧化乙烯颗粒的质量设定为0.05g,如图3所示,是因为采用此比例以及固定质量能够使得导电复合溶液的电阻值较低且测试时稳定性最好。
71.另一个实施例中,本公开还提供一种制备柔性电容传感器的方法,与上一实施例不同的是,本实施例中仅采用聚乙烯发泡棉作为介电层材料,其中,聚乙烯发泡棉的长度及宽度均为10mm,厚度为10mm。
72.另一个实施例中,本公开还提供一种制备柔性电容传感器的方法,与上一实施例不同的是,本实施例中仅采用仿丝瓜聚氨酯海绵作为介电层材料,其中,仿丝瓜聚氨酯海绵的长度及宽度均为10mm,厚度为10mm。
73.下面,本公开对上述实施例制备获得的具有不同介电层的柔性电容传感器的性能通过性能测试装置进行压力电容性能测试。
74.首先,对上述实施例制备获得的柔性电容传感器进行电容灵敏度性能测试,然后对介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器进行不同载荷下的循环稳定性测试和同一载荷下的循环稳定性测试。
75.图5(a)为具有不同介电层的柔性电容传感器的电容灵敏度测试结果。如图5(a)所示,在0到250kpa范围内,介电层为仿丝瓜聚氨酯海绵的柔性电容传感器的灵敏度最高为0.8629kpa-1
,但是当压力增加到3000kpa,仿丝瓜聚氨酯海绵被迅速压平,灵敏度逐渐降低。相反,在0到250kpa范围内,介电层为聚乙烯发泡棉的柔性电容传感器的灵敏度最低为0.14743kpa-1
,但是当压力增加到3000kpa,聚乙烯发泡棉被逐渐压缩,灵敏度降低,但并未失效,仍具有一定的灵敏度。而介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器则很好的综合了前两者的优点,无论是在0到250kpa的低压范围内还是在250kpa到3000kpa的高压范围内均表现出优异的灵敏度,分别为0.4427kpa-1
和0.0019kpa-1
。
76.图5(b)为不同载荷下(分别为1n,2n,3n,4n,5n,6n,7n,8n,9n,10n,50n,100n,150n,200n,250n,300n)介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器的循环稳定性测试图。如图5(b)所示,在同一载荷下对传感器按压多次时,每次按压时传感器的电容变化曲线基本一致,从而证明每次测试时传感器性能均稳定。
77.图5(c)为在1n的载荷下介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器的响应时间测试图。如图5(c)所示,在1n载荷下,该传感器的响应时间为72ms。
78.图5(d)为在5n的载荷下介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器的循环稳定性测试图。如图5(d)所示,在5n的载荷下,经历5000次循环的拉压,每次拉压时,传感器的电容变化曲线相似,以此能够证明介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器的传感性能稳定。
79.下面,本公开进一步对介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器进行接近觉电容性能测试,首先,对其进行接近觉灵敏度性能测试,然后对其进行不同高度下的循环稳定性测试。
80.图6(a)为接近觉灵敏度测试结果。每次测试时,将传感器固定,手掌从距离传感器一定高度的位置向传感器缓慢靠近,随着手掌与传感器距离的降低直到接触,该柔性传感
器的灵敏度逐渐增加。如图6(a)所示,最大检测高度为28cm,最大灵敏度为0.122cm-1
。
81.图6(b)为在高度3cm、5cm和7cm下该柔性传感器的循环稳定性测试图。如图6(b)所示,在同一高度下,经历5次循环后,随着时间变化,该传感器的电容变化曲线相似,证明该传感器的循环稳定性稳定。
82.本技术所述的介电层为仿丝瓜聚氨酯海绵和聚乙烯发泡棉的柔性电容传感器可用于人机交互。首先将传感器固定,手掌从高到低靠近传感器,实现如图7(a)所示的非接触式到如图7(b)所示的接触式按压,通过lcr表进行记录,并在电脑上显示,可以发现电脑桌面上会实时呈现出实验的真实场景,这些画面证明了电容传感器在人机交互中的潜在应用。
83.以上结合具体实施例对本公开所提供的柔性电容传感器进行了详细介绍,同时,上述实施例的说明只是用于帮助理解本公开的方法及其核心思想,对于本领域的一般技术人员,依据本公开的思想,在具体实施方式及应用范围上均会有改变之处。因此,本说明书内容不应理解为对本公开的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。