1.本实用新型涉及智能汽车相机标定技术领域,尤其涉及一种用于智能汽车车载相机的标定装置。
背景技术:
2.智能汽车为通过搭载先进传感器等装置,运用人工智能等新技术,具有自动驾驶功能,逐步成为智能移动空间和应用终端的新一代汽车。近年来,车载环视相机逐步应用在众多车型中,成为辅助驾驶系统的一个重要组成部分。当车载相机安装在车身前、后、左、右四个方位后,为了确定每个车载相机相对于车身的相对位置,需要标定每个车载相机的外参,其中外参即表示了车载相机坐标系与车身坐标系之间的相对位置关系。
3.现有技术中,在对车载相机进行标定时,标定装置的自动化程度低,对相机标定靶的移动和旋转操作多需要人工进行参与,工人劳动强度大,标定效率低,标定的精确度低。
4.针对以上技术问题,本实用新型公开了一种用于智能汽车车载相机的标定装置,本实用新型具有结构简单、可快速部署、操作方便快捷、自动化程度高、提高标定的效率和精确度等优点。
技术实现要素:
5.本实用新型的目的在于克服现有技术的不足,提供了一种用于智能汽车车载相机的标定装置,以解决现有技术中车载相机标定装置自动化程度低,人工劳动强度大,标定的效率和精确度低等技术问题,本实用新型具有结构简单、可快速部署、操作方便快捷、自动化程度高、提高标定的效率和精确度等优点。
6.本实用新型通过以下技术方案实现:本实用新型公开了一种用于智能汽车车载相机的标定装置,包括:
7.底座,底座的顶端竖直设置有立柱,底座的顶端还设置有激光水平仪ⅰ,激光水平仪ⅰ位于立柱的前侧且与立柱位置对应;
8.滑套ⅰ,滑套ⅰ滑动套设在立柱上,立柱上设置有驱动滑套ⅰ上下滑动的驱动机构ⅰ,滑套ⅰ的前端固定设置有与立柱垂直的前侧支臂,滑套ⅰ的左右两端分别设置有与立柱垂直的左侧支臂和右侧支臂;
9.滑套ⅱ,滑套ⅱ分别滑动套设在左侧支臂与右侧支臂上,左侧支臂与右侧支臂上分别设置有驱动滑套ⅱ左右滑动的驱动机构ⅱ,滑套ⅱ的前端固定设置有激光水平仪ⅱ;
10.三轴调节机构,三轴调节机构设置在前侧支臂的前端,三轴调节机构的前端设置有相机标定靶,三轴调节机构驱动相机标定靶在三个方向上转动;
11.侧部滑轨机构,侧部滑轨机构分别设置在相机标定靶前端的左右两侧。
12.优选的,为了便于对滑套ⅰ的位置进行调节,驱动机构ⅰ包括驱动电机ⅰ和丝杆ⅰ,驱动电机ⅰ固定设置在立柱的顶端,立柱的中部设置有竖槽ⅰ,丝杆ⅰ竖直设置在竖槽ⅰ内且丝杆ⅰ的上下两端均与立柱通过轴承转动连接,驱动电机ⅰ的转轴端部向下与丝杆ⅰ的顶端固
定连接,丝杆ⅰ上螺接有连接块ⅰ,连接块ⅰ与滑套ⅰ固定连接。
13.优选的,为了便于对滑套ⅱ的位置进行调节,驱动机构ⅱ包括驱动电机ⅱ和丝杆ⅱ,驱动电机ⅱ分别固定设置在左侧支臂与右侧支臂的外端部,左侧支臂与右侧支臂的中部分别设置有滑槽ⅰ,丝杆ⅱ分别设置在滑槽ⅰ内且丝杆ⅱ的左右两端与左侧支臂以及右侧支臂之间均通过轴承转动连接,驱动电机ⅱ的转轴端部与丝杆ⅱ的外端部固定连接,丝杆ⅱ上螺接有连接块ⅱ,连接块ⅱ与滑套ⅱ固定连接。
14.优选的,为了在不使用左侧支臂与右侧支臂时便于对左侧支臂和右侧支臂进行收纳,滑套ⅰ的左右两侧分别设置有上下贯通的竖槽ⅱ,左侧支臂与右侧支臂的内端分别伸入竖槽ⅱ内且与滑套ⅰ之间通过铰接轴ⅰ铰接,左侧支臂的内端以及右侧支臂的内端均与铰接轴ⅰ固定连接,滑套ⅰ的外壁上分别设置有与铰接轴ⅰ驱动连接的驱动电机ⅲ。
15.优选的,为了便于驱动相机标定靶在不同的方向上进行转动,提高标定的可靠性,三轴调节机构包括驱动电机ⅳ、铰接块ⅰ、铰接块ⅱ、驱动电机
ⅴ
、铰接块ⅲ、驱动电机ⅵ和imu模块,驱动电机ⅳ内置在前侧支臂的前端,驱动电机ⅳ的转轴端部朝向前侧且与铰接块ⅰ固定连接,铰接块ⅱ设置在铰接块ⅰ的前端,铰接块ⅱ的后端与铰接块ⅰ的前端通过铰接轴ⅱ铰接,驱动电机
ⅴ
内置在铰接块ⅰ的内部且驱动电机
ⅴ
与铰接轴ⅱ通过锥形齿轮啮合传动,铰接块ⅲ设置在铰接块ⅱ的前端,铰接块ⅲ的后端与铰接块ⅱ的前端通过铰接轴ⅲ铰接,驱动电机ⅵ内置在铰接块ⅱ的内部且驱动电机ⅵ与铰接轴ⅲ通过锥形齿轮啮合传动,铰接轴ⅲ与铰接轴ⅱ垂直,相机标定靶设置在铰接块ⅲ的前端,imu模块内置在铰接块ⅲ与相机标定靶之间的连接处。
16.优选的,为了便于对智能汽车侧部的车载相机进行标定,侧部滑轨机构包括滑轨、丝杆ⅲ、滑块和驱动电机ⅶ,滑轨的顶端沿其长度方向设置有滑槽ⅱ,丝杆ⅲ设置在滑槽ⅱ内且丝杆ⅲ的两端分别与滑轨通过轴承转动连接,滑块滑动设置在滑轨的顶端且滑块的底部伸入滑槽ⅱ内且与丝杆ⅲ螺接,驱动电机ⅶ设置在滑轨的端部且驱动电机ⅶ的转轴端部与丝杆ⅲ的端部固定连接。
17.优选的,相机标定靶包括相机标定板或者图像显示器。
18.优选的,为了便于对标定装置进行移动,底座底端的四个拐角处分别设置有滚轮。
19.本实用新型具有以下优点:本实用新型结构简单,便于部署与操作,通过驱动机构ⅰ对相机标定靶的高度进行调节,通过三轴调节机构驱动相机标定靶在三个方向上转动,在对汽车左右两侧的车载相机进行标定时,通过驱动机构ⅱ对滑套ⅱ的横向位置进行调节,自动化程度高,降低了工人的劳动强度,提高了标定的效率,且适用于标定不同的车型,通用性强,另外,激光水平仪ⅰ的设置可以精确调节立柱与车载相机位置对应,通过激光水平仪ⅱ的设置可以精确调节汽车两侧的侧部滑轨机构与汽车之间的距离以及确保侧部滑轨机构与汽车的两侧平行,调节的精确度高,从而提高了标定的精确度。
附图说明
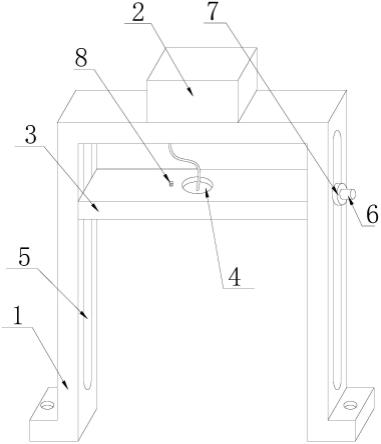
20.图1为本实用新型结构示意图;
21.图2为图1中a处结构放大示意图;
22.图3为图1中b处结构放大示意图;
23.图4为右侧支臂内端结构示意图;
24.图5为图1中c处结构放大示意图;
25.图6为三轴调节机构剖视图;
26.图7为图1中d处结构放大示意图。
27.图中:1、底座;11、立柱;111、竖槽ⅰ;12、激光水平仪ⅰ;13、滚轮;2、滑套ⅰ;21、前侧支臂;22、左侧支臂;23、右侧支臂;24、竖槽ⅱ;25、驱动电机ⅲ;3、驱动机构ⅰ;31、驱动电机ⅰ;32、丝杆ⅰ;321、连接块ⅰ;4、滑套ⅱ;41、激光水平仪ⅱ;5、驱动机构ⅱ;51、驱动电机ⅱ;52、丝杆ⅱ;521、连接块ⅱ;6、滑槽ⅰ;7、铰接轴ⅰ;8、三轴调节机构;81、驱动电机ⅳ;82、铰接块ⅰ;83、铰接块ⅱ;84、驱动电机
ⅴ
;85、铰接块ⅲ;86、驱动电机ⅵ;9、相机标定靶;10、铰接轴ⅱ;100、铰接轴ⅲ;110、侧部滑轨机构;1101、滑轨;1102、丝杆ⅲ;1103、滑块;1104、驱动电机ⅶ;120、滑槽ⅱ。
具体实施方式
28.下面对本实用新型的实施例作详细说明,本实施例在以本实用新型技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例,在本实用新型的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.实施例1
30.实施例1公开了一种用于智能汽车车载相机的标定装置,如图1所示,包括:
31.底座1,底座1的顶端竖直设置有立柱11,底座1的顶端还设置有激光水平仪ⅰ12,激光水平仪ⅰ12位于立柱11的前侧且与立柱11位置对应,底座1底端的四个拐角处分别设置有滚轮13;
32.滑套ⅰ2,如图1和图2所示,滑套ⅰ2滑动套设在立柱11上,立柱11上设置有驱动滑套ⅰ2上下滑动的驱动机构ⅰ3,滑套ⅰ2的前端固定设置有与立柱11垂直的前侧支臂21,滑套ⅰ2的左右两端分别设置有与立柱11垂直的左侧支臂22和右侧支臂23,驱动机构ⅰ3包括驱动电机ⅰ31和丝杆ⅰ32,驱动电机ⅰ31固定设置在立柱11的顶端,立柱11的中部设置有竖槽ⅰ111,丝杆ⅰ32竖直设置在竖槽ⅰ111内且丝杆ⅰ32的上下两端均与立柱11通过轴承转动连接,驱动电机ⅰ31的转轴端部向下与丝杆ⅰ32的顶端固定连接,丝杆ⅰ32上螺接有连接块ⅰ321,连接块ⅰ321与滑套ⅰ2固定连接;
33.滑套ⅱ4,如图1和图3所示,滑套ⅱ4分别滑动套设在左侧支臂22与右侧支臂23上,左侧支臂22与右侧支臂23上分别设置有驱动滑套ⅱ4左右滑动的驱动机构ⅱ5,滑套ⅱ4的前端固定设置有激光水平仪ⅱ41,驱动机构ⅱ5包括驱动电机ⅱ51和丝杆ⅱ52,驱动电机ⅱ51分别固定设置在左侧支臂22与右侧支臂23的外端部,左侧支臂22与右侧支臂23的中部分别设置有滑槽ⅰ6,丝杆ⅱ52分别设置在滑槽ⅰ6内且丝杆ⅱ52的左右两端与左侧支臂22以及右侧支臂23之间均通过轴承转动连接,驱动电机ⅱ51的转轴端部与丝杆ⅱ52的外端部固定连接,丝杆ⅱ52上螺接有连接块ⅱ521,连接块ⅱ521与滑套ⅱ4固定连接;
34.具体的,如图2和图4所示,滑套ⅰ2的左右两侧分别设置有上下贯通的竖槽ⅱ24,左侧支臂22与右侧支臂23的内端分别伸入竖槽ⅱ24内且与滑套ⅰ2之间通过铰接轴ⅰ7铰接,左
侧支臂22的内端以及右侧支臂23的内端均与铰接轴ⅰ7固定连接,滑套ⅰ2的外壁上分别设置有与铰接轴ⅰ7驱动连接的驱动电机ⅲ25;
35.三轴调节机构8,如图1所示,三轴调节机构8设置在前侧支臂21的前端,三轴调节机构8的前端设置有相机标定靶9,三轴调节机构8驱动相机标定靶9在三个方向上转动,相机标定靶9包括相机标定板或者图像显示器;
36.如图1、图5和图6所示,三轴调节机构8包括驱动电机ⅳ81、铰接块ⅰ82、铰接块ⅱ83、驱动电机
ⅴ
84、铰接块ⅲ85、驱动电机ⅵ86和imu模块(图中未标出),驱动电机ⅳ81内置在前侧支臂21的前端,驱动电机ⅳ81的转轴端部朝向前侧且与铰接块ⅰ82固定连接,铰接块ⅱ83设置在铰接块ⅰ82的前端,铰接块ⅱ83的后端与铰接块ⅰ82的前端通过铰接轴ⅱ10铰接,驱动电机
ⅴ
84内置在铰接块ⅰ82的内部且驱动电机
ⅴ
84与铰接轴ⅱ10通过锥形齿轮啮合传动,具体的,驱动电机
ⅴ
84转轴端部与铰接轴ⅱ10上均固定套设有相互啮合的锥形齿轮,铰接块ⅲ85设置在铰接块ⅱ83的前端,铰接块ⅲ85的后端与铰接块ⅱ83的前端通过铰接轴ⅲ100铰接,驱动电机ⅵ86内置在铰接块ⅱ83的内部且驱动电机ⅵ86与铰接轴ⅲ100通过锥形齿轮啮合传动,具体的,驱动电机ⅵ86的转轴端部与铰接轴ⅲ100均固定套设有相互啮合的锥形齿轮,铰接轴ⅲ100与铰接轴ⅱ10垂直,相机标定靶9设置在铰接块ⅲ85的前端,imu模块内置在铰接块ⅲ85与相机标定靶9之间的连接处,imu全称inertial measurement unit,即惯性测量单元,其包括陀螺仪、加速度传感器等,imu模块属于现有技术,因此,在本技术并未对imu模块的具体结构及工作原理作赘述,该赘述的省略并不影响对本技术技术方案的理解;
37.侧部滑轨机构110,如图1和图7所示,侧部滑轨机构110分别设置在相机标定靶9前端的左右两侧,侧部滑轨机构110包括滑轨1101、丝杆ⅲ1102、滑块1103和驱动电机ⅶ1104,滑轨1101的顶端沿其长度方向设置有滑槽ⅱ120,丝杆ⅲ1102设置在滑槽ⅱ120内且丝杆ⅲ1102的两端分别与滑轨1101通过轴承转动连接,滑块1103滑动设置在滑轨1101的顶端且滑块1103的底部伸入滑槽ⅱ120内且与丝杆ⅲ1102螺接,驱动电机ⅶ1104设置在滑轨1101的端部且驱动电机ⅶ1104的转轴端部与丝杆ⅲ1102的端部固定连接;
38.本实用新型的工作过程如下:工作时,首先,将标定装置置于汽车前端适当的位置,通过底座1顶端的激光水平仪ⅰ12射出的激光线束调节立柱11与汽车前端的车载相机位置对应,然后,通过驱动机构ⅰ3调节好相机标定靶9的高度,此时,通过三轴调节机构8驱动相机标定靶9在三个方向上转动来改变相机标定靶9的姿态,进行多组数据的采集;当标定汽车左右两侧的车载相机时,首先,通过驱动电机ⅲ25分别驱动左侧支臂22和右侧支臂23向上旋转至水平状态,然后通过驱动机构ⅱ5调节滑套ⅱ4的位置从而对立柱11左右两侧的激光水平仪ⅱ41的位置进行调节,根据激光水平仪ⅱ41射出的激光线束对汽车两侧的侧部滑轨机构110的位置进行调节,激光水平仪ⅱ41的设置可以很好的保证侧部滑轨机构110与汽车两侧车身平行且距离相等,然后,将相机标定靶9垂直安装在侧部滑轨机构110上的滑块1103的顶端或者水平安装在侧部滑轨机构110上的滑块1103的顶端,再通过驱动电机ⅶ1104调节滑块1103滑动来对相机标定靶9的位置进行调节,进行多组数据的采集;当标定汽车后端的车载相机时,将标定装置至于汽车后端的适当位置,然后通过三轴调节机构8驱动相机标定靶9在三个方向上转动来改变相机标定靶9的姿态进行多组数据的采集。
39.本实用新型便于携带,占地面积小,可以快速部署实现对车载相机的标定,方便、
快捷、高效,标定精度高,自动化程度高,方便工作人员操作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。