1.本发明涉及一种用于控制浮动船舶的运动补偿导桩器的系统,包括导桩器,该导桩器用于在将单桩打入海床期间用于沿单桩的纵向方向对单桩进行导向;致动器,该致动器用于在相对于安装有导桩器的船舶的水平方向上移动导桩器;控制单元,用于控制致动器,该控制单元配置为补偿安装有导桩器的船舶的运动,以在将单桩打入海床期间维持导桩器的水平位置。
背景技术:
2.这种系统在本领域中被称为波浪引起的运动补偿桩夹持器。现有系统使用基于桩倾斜和船舶移动的连续测量的位置控制。已知系统的致动器包括成组的液压缸,用于相对于安装有导桩器或夹持器的船舶移动导桩器或夹持器。这允许夹持器补偿在波动和摇摆方向上干扰船舶运动。申请人已经发现,将单桩打入海床期间,当单桩穿透深度增加时,已知系统的控制单元是不够的。在穿透过程的进程期间,在倾斜角大于零的情况下,可能会在夹持器上施加相对较大的力,该倾斜可能是由波浪和水流力、不规则的土壤结构和组合了实心单桩在土壤中的条件的位置控制不准确引起的。当夹持器位置发生位移以减小倾斜角时,例如由于超出其操作范围或由于夹持器的过大力而船舶推出范围之外,用于运动补偿的现有的控制可能会受到干扰。已知系统的控制单元不够的另一个原因在于,在将单桩打入海床期间,当单桩穿透深度增加时,单桩在地面中的“铰链”将固定,即,将更难以校正单桩的方位。由于用于运动补偿控制的不准确性,加上在海床单桩的铰链效应降低,单桩与夹持器之间的力可能增大到不可接受的水平。
技术实现要素:
3.本发明旨在提供一种改进的系统。
4.为此,根据本发明的系统设置有第一传感器和第二传感器,该第一传感器用于确定在将单桩打入海床期间单桩相对于竖直的倾斜角,该第二传感器用于确定在将单桩打入海床期间单桩在导桩器上的实际力的大小和方向,其中,控制单元配置为当倾斜角由第一传感器确定时,确定导桩器作用在单桩上用于最小化倾斜角的期望的力,并且当期望的力大于实际力时,控制致动器以与实际力的方向相反地移动导桩器,而当实际力大于期望的力时,控制致动器以在与实际力相同的方向上移动导桩器。
5.本发明的优点在于,控制单元的配置仅在某些条件下导致导桩器的位移与实际力的方向相反。这将作用在导桩器上的力保持在可接受的限制内,从而防止运动控制超出其操作范围。
6.用于补偿船舶的运动的控制单元的操作可以表示为运动控制部分,并且通过确定期望的力来控制致动器的运动控制部分的操作可以表示为力控制部分。根据本发明的运动控制部分和力控制部分的同时操作可以表示为混合控制技术。当单桩在打桩期间保持在竖直方位时,运动控制部分在没有力控制部分的情况下起作用。一旦单桩倾向于倾斜,例如由
于在穿透海床期间土壤结构的变化,力控制部分也将起作用。另一方面,如果船舶在完全静止的情况下不移动,则只有在单桩倾斜的情况下,力控制部分才可能起作用。然而,在实践中,大多数时候运动控制部分和力控制部分会同时起作用。
7.控制单元可以配置为使得当期望的力超过预先确定的力水平时,期望的力被设置在预先确定的力水平处,以避免在操作条件下对补偿船舶的运动的运动控制的干扰。因此,期望的力处于低于或等于预先确定的力水平。在实践中,预先确定的力水平可以是固定的水平,而期望的力的大小根据实际条件(例如,倾斜角和海床的土壤结构)而变化。
8.预先确定的力水平可以与安装有导桩器的船舶的推进器的最大功率成比例。这可以防止船舶在操作条件下被推离单桩。
9.船舶的推进器的能力可能小于导桩器的力能力。在短时期内(“爆发”),该力能力可用于将单桩从其倾斜方位推回其竖直方位。由于力控制对运动控制部分更友好,因此力控制可能对船舶的可加工性设置限制。
10.在实际的实施例中,致动器包括成组的液压缸,该成组的液压缸是由控制单元可控制的。
11.第二传感器可以包括压力传感器,用于测量液压缸中的压力。可替代地,实际力可以借助于导桩器处的一个或更多个负载销来测量。
12.期望的力可以通过以下方式来确定:控制致动器从单桩的倾斜方位朝向竖直方位的方向上移动导桩器,并确定与倾斜角的减小相关的实际力的增加率。例如,这可以借助于pid控制器来执行。
13.可替代地,期望的力可以基于单桩被打入的海床的土壤结构与导桩器的所需的力之间的关系来确定,该导桩器的所需的力作用在单桩上,用于将单桩从其倾斜方位朝向竖直方位移动。这可以是基于模型的计算,在该计算中,该关系在打桩期间得到确定。
14.控制单元可以设置算法,用于补偿安装有导桩器的船舶的运动,该算法使用期望的力作为输入,以便预测将要施加在导桩器上的力。
15.该系统可以设置锤子,用于将单桩打入海床,其中,第一传感器设置在该锤子处。
16.在实际的实施例中,第一传感器是倾斜传感器,第二传感器是负载传感器。
17.本发明还涉及一种方法,用于在将单桩打入海床期间控制浮动船舶的运动补偿导桩器,其中,单桩在其纵向方向上由导桩器导向,并且导桩器在水平方向上移动,以补偿安装有导桩器的船舶的运动,其中,在将单桩打入海床期间,确定单桩相对于竖直方向的倾斜角以及单桩作用在导桩器上的实际力的大小和方向,其中,确定导桩器作用在单桩上用于最小化检测到的倾斜角的期望的力,并且其中,当期望的力大于实际力时,在与实际力的方向相反地移动导桩器,而当实际力大于期望的力时,在与实际力相同的方向上移动导桩器。
18.当期望的力超过预先确定的力水平时,可以将期望的力设置在预先确定的力水平处,以避免运动位置控制的干扰。
19.期望的力可以通过以下方式来确定:在从单桩的倾斜方位朝向竖直方位的方向上移动导桩器,并确定与倾斜角的减小相关的实际力的增加率。
20.可替代地,期望的力可以基于单桩被打入的海床的土壤结构与导桩器所需的力之间的关系来确定,该导桩器所需的力作用在单桩上,用于将单桩从其倾斜方位朝向竖直方位移动。
21.本发明还涉及包括如上文所限定的系统的船舶。上述运动控制部分和力控制部分可以在船舶中的不同子模块中实现。
附图说明
22.在下文中将参照示意图来阐明本发明,这些示意图以示例方式示出本发明的实施例。
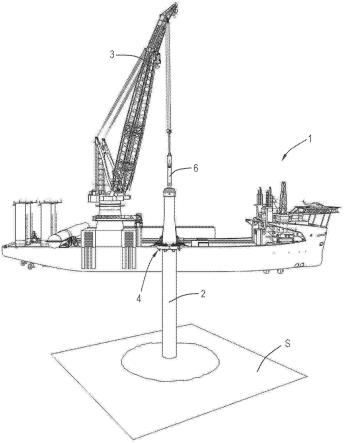
23.图1是根据本发明的船舶的立体图,包括用于控制运动补偿导桩器的系统的实施例。
24.图2是图1中示出的船舶的一部分的放大立体图。
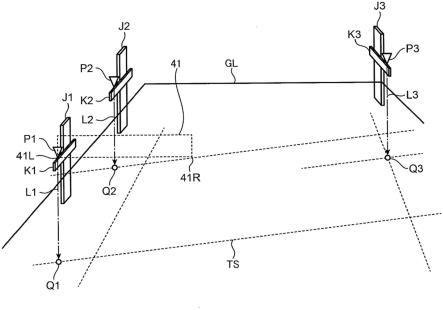
25.图3是安装到图1的船舶上的运动补偿导桩器的俯视图。
26.图4是示出用于控制图3的运动补偿导桩器的系统的实施例的图。
具体实施方式
27.图1示出了一种浮动安装船舶1,用于在海床s中安装单桩2。安装船舶1设置有用于提升单桩2的起重机3。图1至图3示出了运动补偿导桩器4,用于在将单桩2打入海床s期间在单桩2的纵向方向上对单桩2进行导向。导桩器4安装至船舶1,并且该导桩器4在相对于船舶1的水平方向上,即在纵向和侧向方向上或在x和y方向上,通过液压缸5形式的致动器是可移动的,以补偿船舶运动。导桩器4可以以众所周知的方式打开和关闭,以围住单桩2。导桩器4的作用是从操作开始竖直地安装单桩2,直到单桩2被锤打得足够深,使得单桩2得到土壤支撑依靠其自身安全地直立为止。
28.在操作条件下,单桩2被船舶1从生产设施处水平运输到离岸安装地点。在单桩2被安装之前,借助于起重机3将其倒立,之后单桩2从起重机3竖直悬挂。随后,单桩2被降低并放置在海床s上。根据土壤结构,单桩2可以由于其自身重量首先穿透海床s至一定深度。可替代地,单桩2可以借助于独立系统或导桩器集成倒立系统(未示出)而被倒立。导桩器4接合至单桩2,并且打桩锤6通过起重机3被放置在单桩2的顶部,以将单桩2打入海床s中。导桩器4由液压缸5控制以维持单桩2的竖直方位。从浮动船舶上这样安装单桩2比自升式驳船允许更大的有效载荷和起重能力,但由于波浪引起的船舶运动和严格的单桩竖直安装公差,这也是具有挑战性的。
29.安装船舶1设置有用于控制运动补偿导桩器4的系统,该系统由图4中的图示出。除了导桩器4和液压缸5之外,该系统还包括用于控制液压缸5的控制单元7、用于确定在将单桩2打入海床s期间单桩2相对于竖直的倾斜角的倾斜传感器8、以及压力传感器9,该压力传感器9用于测量液压缸5中的压力,以确定在将单桩2打入海床s期间单桩2作用在导桩器4上的实际力的大小和方向。在图4中,倾斜传感器8在单桩2旁边示出,但在可替代实施例中,它可以位于打桩锤6处。
30.控制单元7配置用于补偿船舶1的运动,以便在将单桩2打入海床s期间维持导桩器4的水平位置。这种控制基于常规的主动船舶运动补偿,该常规的主动船舶运动补偿旨在对导桩器4定位成与地球同步,并且这种控制也是众所周知的。它试图与船舶运动正好相反地移动导桩器4,使得导桩器4在水平方向上静止不动,并且单桩2保持直立。作用在船舶1上的导桩器4的力可能干扰船舶1的定位。因此,根据本发明的控制单元7还配置为确定导桩器4
作用在单桩2上期望的力,以在倾斜传感器8检测到倾斜角的情况下最小化倾斜角。控制单元7对检测到倾斜角的响应可以是液压缸5被操作,使得液压缸5与实际力的方向相反地移动导桩器4。但是,这种响应仅在期望的力大于实际力时才会发生。如果实际力大于期望的力,则液压缸5被操作,使得液压缸5在与实际力相同的方向上移动导桩器4。后者的条件控制步骤用于防止波浪引起的运动的补偿控制超出其操作范围,导致运动控制不稳定。
31.可以以不同的方式确定导桩器4作用在单桩2上用于最小化倾斜角的期望的力。例如,期望的力通过操作液压缸5来确定,使得液压缸5在从单桩2的倾斜方位朝向竖直方位的方向上移动导桩器4,从而确定与倾斜角的减小相关的实际力的增加。这可以借助于pid控制器来实现,该pid控制器逐步增加液压缸5中的压力,以便获得倾斜角的减小与导桩器4作用在单桩2上的力之间的关系。从该关系推导出将单桩2偏转回其竖直方位的期望的力。将该期望的力与单桩2作用在导桩器4上的实际力进行比较。如上所述,操作液压缸5,使得当期望的力大于实际力时,液压缸5与实际力的方向相反地移动导桩器4,而当实际力大于期望的力,液压缸5在与实际力相同的方向上移动导桩器4。在操作条件下,由于动力学和系统惯性以及选择的控制速度,实际力可能以一定时间延迟(例如,几秒钟)跟随设定的期望的力。值得注意的是,力的时间延迟可能增大系统/船舶的操作窗口。船舶允许在一定的时间量(例如,五到八秒)内在导桩器上的力高于船舶的推进器可以递送的力。
32.用于确定导桩器4作用在单桩2上的期望的力以最小化倾斜角的可替代方式是基于单桩2被打入的海床的土壤结构与导桩器4所需的力之间的关系,该导桩器4的所需的力作用在单桩2上,用于将单桩2从其倾斜方位朝向竖直方位移动。可以从土壤结构和穿透单桩2的模型中推导出这种关系。可替代地,击打计数与每次击打单桩2的穿透之间也可能具有关系,该关系可用于推导出单桩2在海床s中的固定,以限定力控制的轮廓,从而使单桩2带至竖直方位,即确定期望的力。
33.控制单元7配置为使得当期望的力超过预先确定的力水平时,将期望的力设置在预先确定的力水平处。预先确定的力水平与船舶1的方位推进器10的最大功率成比例。这防止系统在所需的力超过船舶1的方位推进器10的最大力的情况下试图朝向竖直方向推动单桩2。
34.本发明不限于附图中所示和上文中描述的实施例,在权利要求及其技术等同方案的范围内可以以不同的方式改变本发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。