技术特征:
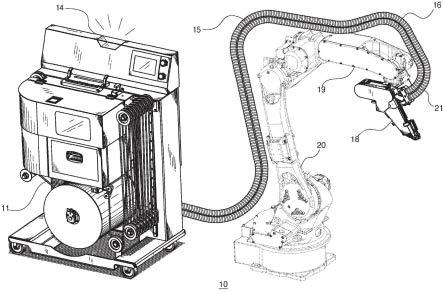
1.一种系统,所述系统包括:胶带的源,所述胶带的所述源包括与粘合剂相关联的材料和至少一个可移除衬垫;涂布器头部;切割机构;至少一个驱动进给机构,所述驱动进给机构配置成以受控速率将所述胶带从所述源指引至所述涂布器头部;其中所述涂布器头部是可控的,以将所述材料涂布在表面或基底上;并且其中所述涂布器头部包括切割机构,所述切割机构配置成切断所述材料,同时保持所述至少一个可移除衬垫完好无损。2.根据权利要求1所述的系统,其中所述涂布器头部包括涂布末端,并且其中所述涂布器胶带头部安装在机器人上,所述机器人配置成沿着预定义涂布路径行进以涂布所述材料。3.根据权利要求1所述的系统,其中所述至少一个驱动进给机构包括用于将所述胶带朝向所述涂布器头部指引的驱动单元。4.根据权利要求3所述的系统,其中所述胶带经由柔性导管传送至所述涂布器头部。5.根据权利要求1所述的系统,其中所述源包括安装在可旋转轴上的所述胶带的分派卷筒。6.根据权利要求2所述的系统,其中所述机器人使用至少一个第一传感器定位所述涂布器头部以涂布所述胶带。7.根据权利要求6所述的系统,其中所述至少一个第一传感器识别基底特征或边缘,以便于所述涂布末端与所述预定义涂布路径的自对准。8.根据权利要求6所述的系统,其中所述至少一个第一传感器验证背胶材料在所述表面或所述基底上的正确涂布。9.根据权利要求6至8中任一项所述的系统,其中所述至少一个传感器包括图像捕获装置。10.根据权利要求6至8中任一项所述的系统,其中所述至少一个传感器包括激光轮廓仪。11.根据权利要求1所述的系统,其中所述胶带具有可变尺寸。12.根据权利要求1所述的系统,其中所述至少一个驱动进给机构包括至少一个第二传感器,并且所述涂布器头部包括至少一个第三传感器,由此所述至少一个第二传感器和所述至少一个第三传感器检测所述胶带中的张力是否被保持。13.根据权利要求3所述的系统,其中所述至少一个驱动进给机构包括具有所述胶带的可变环路的缓冲区,以及至少一个第四传感器,所述至少一个第四传感器配置为检测所述胶带在所述缓冲区内的位置,从而触发所述驱动单元将所述胶带进给到所述涂布器头部。14.根据权利要求1所述的系统,所述系统还包括人机界面(hmi)。15.根据权利要求14所述的系统,其中人机界面(hmi)通信地联接到与所述源、所述涂布器头部、所述切割机构和所述至少一个驱动进给机构相关联的控制器。16.根据权利要求1所述的系统,其中所述涂布末端包括圆形边缘,所述圆形边缘配置为将所述至少一个可移除衬垫从所述材料剥离,以暴露用于粘附到所述表面或基底的粘合
剂。17.根据权利要求1所述的系统,其中向外的进给管将用过的至少一个可移除衬垫传送远离所述涂布器头部。18.根据权利要求1所述的系统,所述系统还包括至少一个第五传感器,所述至少一个第五传感器配置为检测胶带中的拼接接头并触发所述系统启动清除例程。19.根据权利要求18所述的系统,其中所述清除例程包括将所述材料置于牺牲表面上。20.根据权利要求18所述的系统,其中所述清除例程包括将所述材料置于真空和自由空间中的至少一者中。21.根据权利要求2所述的系统,所述系统还包括辊机构,用于向所述表面或所述基底上的所述材料施加力。22.根据权利要求2所述的系统,其中所述涂布器头部包括用于在涂布所述材料之前将助粘剂涂布到所述表面或基底的设备。23.根据权利要求2所述的系统,其中至少一个第六传感器检测助粘剂的存在,并自动将所述材料涂布到其上具有所述助粘剂的位置。24.根据权利要求4所述的系统,其中所述导管为螺旋线圈。25.根据权利要求4所述的系统,其中所述导管为管。26.根据权利要求1所述的系统,其中所述涂布器头部安装在至少一个可移动轴线上,以根据编程的指令自动涂布所述材料。27.根据权利要求1所述的系统,其中所述涂布器头部安装在机器人上,以根据编程的指令自动涂布所述材料。28.根据权利要求2所述的系统,所述系统还包括控制器,所述控制器包括具有程序指令的计算机可读介质,所述程序指令能由处理器执行以至少导致:所述至少一个驱动进给机构指引所述胶带;所述涂布末端按照预定义路径将所述材料涂布到所述表面或所述基底;与所述涂布器头部相关联的切割机构切断所述材料,同时保持至少一个可移除衬垫完好无损;与所述涂布器头部相关联的辊机构向所述表面或所述基底上的所述材料施加力;以及处置装置在涂布所述材料后收集所述至少一个可移除衬垫。29.根据权利要求2所述的系统,其中所述涂布器包括用于安装在协作机器人上的至少一个安全装置。30.根据权利要求17所述的系统,其中所述至少一个可移除衬垫被收集并切断成更小的可管理的块。31.一种用于将胶带涂布到表面或基底的系统,所述胶带包括与粘合剂相关联的材料和至少一个可移除衬垫,所述系统包括:所述胶带的源;包括涂布末端的机器人涂布器头部;联接在所述源与所述机器人涂布器头部之间的柔性胶带导管;至少一个驱动进给机构;切割机构;
包括程序指令的控制器,所述程序指令能由处理器执行以至少导致:所述至少一个驱动进给机构将所述胶带从所述源指引至所述涂布末端;所述涂布末端按照预定义路径将所述材料涂布到所述表面或所述基底;以及所述切割机构切断所述材料,同时保持至少一个可移除衬垫完好无损。32.根据权利要求31所述的系统,所述系统还包括辊机构,用于向所述表面或所述基底上的所述胶带施加力。33.根据权利要求32所述的系统,所述系统还包括涂布所述材料后用于所述至少一个可移除衬垫的处置装置。34.根据权利要求33所述的系统,其中所述处置装置包括容器和导管中的至少一者。35.根据权利要求31所述的系统,所述系统还包括控制器,所述控制器包括具有程序指令的计算机可读介质,所述程序指令能由处理器执行以至少导致:所述至少一个驱动进给机构指引所述胶带;所述涂布末端按照预定义路径将所述材料涂布到所述表面或所述基底;所述切割机构切断所述材料,同时保持至少一个可移除衬垫完好无损;与所述涂布器头部相关联的辊机构向所述表面或所述基底上的所述胶带施加力;以及处置装置在涂布所述材料后收集所述至少一个可移除衬垫。36.一种将胶带涂布到表面或基底的方法,所述胶带包括材料和至少一个可移除衬垫,所述方法包括以下步骤:(a)在第一胶带站处,从主要胶带供应源接收所述胶带;(b)将所述胶带进给到柔性进料导管中,所述柔性进料导管联接在所述第一胶带站与具有胶带涂布器的机器人端部执行器之间,所述柔性导管的尺寸允许将所述胶带输送到远程机器人端部执行器;(c)在与所述胶带涂布器相关联的第二胶带站处,从所述主要胶带供应源接收所述胶带以形成次要胶带源;(d)在所述胶带涂布器处,沿着预定义路径将所述材料涂布在所述表面或所述基底上,并从所述主要胶带移除所述至少一个可移除衬垫;以及(e)在所述预定义路径的端部,切断所述材料,同时保持所述至少一个可移除衬垫完好无损。37.根据权利要求36所述的方法,其中所述第一胶带站包括一系列相对的滑轮,以形成所述胶带的多个环路,从而在将所述胶带进给到所述第二胶带站之前产生所述胶带的缓冲区。38.根据权利要求36所述的方法,所述方法包括在需求循环期间在所述胶带内保持预定张力的另一步骤。39.根据权利要求36所述的方法,所述方法包括将所述至少一个可移除衬垫引导到柔性出料导管的另一步骤。40.根据权利要求36所述的方法,其中所述柔性进料导管包括真空。41.根据权利要求36所述的方法,其中所述柔性出料导管包括真空。42.根据权利要求36所述的方法,所述方法包括在所述材料上施加压力以将所述材料压在所述表面或所述基底上的另一步骤。
技术总结
一种系统,所述系统包括:胶带的源,所述胶带的所述源包括与粘合剂相关联的材料和至少一个可移除衬垫;涂布器头部;切割机构;至少一个驱动进给机构,所述驱动进给机构配置成以受控速率将所述胶带从所述源指引至所述涂布器头部;其中所述涂布器头部是可控的,以将所述材料涂布在表面或基底上;并且其中所述涂布器头部包括切割机构,所述切割机构配置成切断所述材料,同时保持所述至少一个可移除衬垫完好无损。无损。无损。
技术研发人员:M
受保护的技术使用者:创新自动化公司
技术研发日:2020.11.09
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。