1.本发明涉及真空吸尘器,更详细地,使用旋转刷子能够干净地清扫光滑的地板上的灰尘的真空吸尘器。
背景技术:
2.真空吸尘器根据安装的刷子种类的不同,其清扫能力有差异。
3.在凹凸不平的地毯上,僵硬的塑料材质的用于地毯的刷子在清洁效率方面有利。
4.另外,在地板光滑的廊檐或者地板纸,柔软的绒材质的廊檐用刷子在清洁效率方面有利。
5.如果使用绒材质的廊檐用刷子,则可以防止因刷子而产生的地板刮伤。另外,如果高速旋转绒材质的刷子,则可以使附着于地板上的细微灰尘漂浮后吸入并除去。
6.与此相关,大韩民国公开专利公报第2019-0080855号(以下,专利文献1)中公开了真空吸尘器。专利文献1的真空吸尘器构成为包括本体和吸嘴。吸嘴构成为包括壳体、旋转清洁部、驱动部以及旋转支撑部。
7.壳体构成为包括第一侧面盖和第二侧面盖。第一侧面盖和第二侧面盖设置于旋转清洁部的两侧面。
8.旋转清洁部是用多个毛与地板面进行摩擦并把头发、灰尘等异物移向后方的构成。旋转支撑部和驱动部配置于旋转清洁部的两侧末端部。
9.驱动部插入于旋转清洁部的一侧末端部。驱动部向旋转清洁部传递驱动力。驱动部固定于第一侧面盖上。第一侧面盖与壳体结合。旋转清洁部通过驱动部传递的驱动力而旋转,并与地板面进行摩擦。旋转清洁部和壳体之间的摩擦力可以减少旋转清洁部的旋转速度。因此,多个毛在旋转清洁部的一侧端与壳体稍微隔开或者简单地接触。
10.旋转清洁部在与驱动部相反的一侧插入于旋转清洁部的末端部。旋转支撑部使旋转清洁部能够旋转地支撑。旋转支撑部设置于第二侧面盖上。旋转清洁部和第二侧面盖之间的摩擦力可以减少旋转清洁部的旋转速度。因此,多个毛在旋转清洁部的另一末端与第二侧面盖稍微隔开或者简单地接触。
11.需要说明的是,专利文献1的真空吸尘器存在如下问题:地板面的头发、灰尘等异物穿过多个毛与壳体之间、以及多个毛与第二侧面盖之间进入旋转支撑部和驱动部。进入旋转的物体和被固定的物体之间的异物可能妨碍旋转体和固定体之间的旋转运动。这是指驱动力的损失。最终,由于旋转清洁部的旋转力减小,从而使地板上异物向后方移动的力量被减小。
12.但是,为了防止这种情况,如果将多个毛分别紧贴于壳体和第二侧面盖上,则增加毛与壳体、以及毛与第二侧面盖之间的摩擦力。最终,旋转清洁部的旋转力减小,从而使地板的异物向后方移动的力量被减小。
13.另外,毛在纤维层的上面向一个方向形成纹路。即,已植毛的毛向一个方向以倾斜的方式被植毛。作为一例,毛可以沿着喷嘴主体的长度方向形成纹路。或者,毛可以沿着喷
嘴主体的圆周方向形成纹路。或者,毛可以沿着喷嘴主体的螺旋方向形成纹路。
14.在旋转清洁部旋转的过程中,多个毛周期性地接触地板并反复进行弯曲和伸展。在这个过程中,头发、灰尘等异物随着毛的纹路移动到旋转清洁部的末端部。
15.即,头发、灰尘等异物在
①‘
地板面穿过多个毛与壳体之间、以及多个毛与第二侧面盖之间直接进入旋转支撑部和驱动部’,或者,
②‘
在附着于毛的状态下沿着毛的纹路移动到旋转清洁部的末端部,可以进入旋转支撑部和驱动部’。
16.①
局限于旋转清洁部的下部。
②
沿着旋转清洁部的圆周方向规定地发生。因此,头发、灰尘等异物主要从旋转清洁部的下部进入旋转支撑部和驱动部。本发明的发明者研究出了,可以同时最小化因摩擦力所产生的驱动力损失和因异物所产生的驱动力损失的方案。
技术实现要素:
17.要解决的技术问题
18.本发明要解决的一课题是提供一种真空吸尘器,其即使附着于旋转刷子上的头发、灰尘等异物沿着毛的纹路移动到旋转刷子的末端部,也可以阻止因异物所产生的旋转力损失。
19.本发明要解决的一课题是提供一种真空吸尘器,其可以阻止地板面的头发、灰尘等异物从旋转刷子的两侧末端部进入旋转刷子与壳体之间,以及旋转刷子与装拆盖之间的现象。
20.本发明要解决的一课题是提供一种真空吸尘器,其阻止因异物所产生的旋转力损失,并也能够最小化因摩擦力所产生的旋转力损失。
21.解决问题的手段
22.根据本发明实施例的真空吸尘器,形成于壳体的第一肋可以沿着第一轴构件的周围可以与刷子构件接触。因此,即使附着于旋转刷子上的头发、灰尘等异物沿着毛的纹路移动到所述旋转刷子的末端部,可以阻止所述旋转刷子的旋转力损失。
23.根据本发明实施例的真空吸尘器,可以构成为包括本体和吸嘴。
24.所述本体可以形成空气压力差。在所述本体的内部可以设置有送风机。
25.所述吸嘴通过空气压力差可以吸入地板上的灰尘。
26.所述吸嘴可以构成为包括所述壳体、驱动部、所述旋转刷子以及装拆盖。
27.所述壳体可以形成灰尘向所述本体移动的入口。所述入口可以在所述壳体的后方形成。所述入口可以是圆筒形状。
28.所述驱动部可以在所述壳体设置。所述驱动部可以产生旋转力。所述驱动部可以使第一轴构件旋转。所述驱动部可以构成为包括马达和传动装置。
29.所述旋转刷子可以旋转,从而使所述地板上的灰尘推向所述入口侧。
30.所述旋转刷子可以构成为包括圆筒形主体和所述刷子构件。
31.所述主体可以接受所述第一轴构件的旋转运动传递。所述驱动部可以向所述主体传递旋转运动。所述主体可以形成内部空的圆筒形状。
32.所述刷子构件可以附着于所述主体的外表面,从而与所述地板进行摩擦。所述刷子构件可以包括多个毛,所述多个毛因地板而弹性弯曲变形,并将所述灰尘推向所述入口
侧。所述多个毛可以由因外力而容易弹性弯曲变形的柔性材质形成。
33.在所述壳体可以形成有所述第一肋。所述第一肋可以在所述壳体向旋转轴方向凸出,从而所述第一肋与所述刷子构件接触。
34.以所述主体的旋转轴为中心的所述刷子构件的最外围半径,可以比所述主体的旋转轴与所述第一肋之间的距离还长。因此,所述第一肋夹设于所述壳体与所述刷子构件之间,从而可以阻止所述壳体和所述刷子构件之间发生缝隙。最终,异物可能无法进入所述壳体与所述刷子构件之间。
35.所述第一肋可以构成为包括第一a肋和第一b肋。所述第一a肋与所述第一b肋可以彼此连接。所述第一a肋和所述第一b肋可以形成包围所述一轴构件周围的形状。
36.所述第一a肋可以与所述主体的旋转轴形成规定的距离。所述第一a肋可以以所述主体的旋转轴为中心沿着圆周方向形成。
37.以所述主体的旋转轴为中心的所述刷子构件的最外围半径,可以比所述主体的旋转轴与所述第一a肋之间的距离还长。因此,即使所述旋转刷子旋转所述第一a肋和所述刷子构件可以持续地保持接触面。
38.所述第一b肋可以设置于所述旋转轴下方。所述第一b肋可以与所述地板形成规定的距离。因此,所述第一b肋在所述主体中心轴的正下方,可以与所述主体的中心轴形成最短距离。因此,即使所述旋转刷子旋转所述第一b肋和所述刷子构件可以持续地保持接触面。
39.所述毛根据弹性弯曲变形的形状,可以分为多个第一毛、多个第二毛以及多个第三毛。
40.所述第一毛可以是指与所述第一肋隔开的毛。在所述主体旋转时,所述第一毛可以仅通过与所述地板的摩擦而弹性弯曲变形。
41.所述第二毛可以是指,夹设于所述主体的外表面与所述第一肋之间的毛。将所述旋转刷子的所述第二轴构件插入于所述第一轴构件时,所述第二毛可以夹设于所述主体的外表面和所述第一肋之间。
42.在所述主体旋转时,所述第二毛可以因与所述第一肋的摩擦而弹性弯曲变形。随着所述第一肋朝所述旋转轴方向凸出的长度增加,可以增加所述第二毛的数量。
43.在所述主体旋转时,所述第二毛的弹性弯曲变形量可以大于所述第一毛的弹性弯曲变形量。因此,所述第二毛的体积密度可能高于所述第一毛的体积密度。
44.所述第三毛是指,因所述第一肋被推向所述旋转轴方向的弹性弯曲变形的毛。当所述旋转刷子的所述第二轴构件插入于所述第一轴构件时,所述第三毛可以因所述第一肋被推向所述旋转轴方向。
45.在所述主体旋转时,所述第三毛因与所述地板的摩擦可以进一步弹性弯曲变形。在所述主体旋转时,所述第三毛整体的弹性弯曲变形量可能大于所述第一毛的弹性弯曲变形量。因此,所述第三毛的体积密度可能大于第一毛的体积密度。
46.所述第二毛和所述第三毛与第一b肋接触时的体积密度,可能比与第一a肋接触时的体积密度变大。因此,可以阻止头发、灰尘等异物从旋转刷子的两侧末端部直接进入旋转刷子与壳体之间,以及旋转刷子与装拆盖之间的现象。
47.所述旋转刷子可以与所述第一轴构件衔接并旋转。
48.所述装拆盖可以在与所述第一轴构件相反的一侧支撑所述旋转刷子能够旋转。
49.所述装拆盖可以形成所述装拆盖与所述刷子构件接触的第二肋。所述第二肋在所述装拆盖可以朝所述主体的旋转轴方向凸出。
50.以所述主体的旋转轴为中心的所述刷子构件的最外围半径,可以比所述主体的旋转轴与所述第二肋之间的距离还长。因此,所述第二肋夹设于所述装拆盖与所述刷子构件之间,可以阻止所述装拆盖与所述刷子构件之间发生空隙。最终,异物可能无法进入所述装拆盖与所述刷子构件之间。
51.所述第二肋可以构成为包括第二a肋和第二b肋。所述第二a肋和所述第二b肋可以彼此连接。
52.所述第二a肋可以与所述主体的旋转轴形成规定距离。所述第二a肋可以在所述旋转轴的前方形成。所述第二a肋可以以所述主体的旋转轴为中心沿着圆周方向形成。
53.以所述主体的旋转轴为中心的所述刷子构件的最外围半径,可能比所述主体的旋转轴与所述第二a肋之间的距离还长。因此,即使所述旋转刷子旋转所述第二a肋和所述刷子构件可以持续地保持接触面。
54.所述第二b肋可以设置于所述旋转轴下方。所述第二b肋可以与所述地板形成规定距离。因此,所述第一b肋可以在所述主体中心轴的正下方与所述主体的中心轴形成最短距离。因此,即使所述旋转刷子旋转所述第一b肋和所述刷子构件可以持续地保持接触面。
55.所述第二毛可以夹设于所述主体的外表面与所述第二肋之间。当所述主体与所述装拆盖能够旋转地连接时,所述第二毛可以夹设于所述主体的外表面与所述第二肋之间。
56.在所述主体旋转时,所述第二毛通过与所述第二肋的摩擦可以弹性弯曲变形。随着所述第二肋朝所述旋转轴方向凸出的长度增加,可能增加所述第二毛的数量。
57.所述第三毛是指,因所述第二肋被推动而朝所述旋转轴方向弹性弯曲变形的毛。当所述主体与所述装拆盖能够旋转地连接时,所述第三毛可以通过所述第二肋被推向所述旋转轴方向。
58.所述第二毛和所述第三毛随着靠近所述旋转轴的正下方可能增加体积密度。因此,可以阻止地板面上的头发、灰尘等异物从旋转刷子的两侧末端部直接进入旋转刷子与壳体之间,以及旋转刷子与装拆盖之间的现象。
59.发明的效果
60.根据本发明的实施例,由于沿着第一轴构件的周围配置的第一肋在主体的旋转轴方向凸出,并体积密度大的第二毛和第三毛被配置于沿刷子构件的圆周方向,因此,即使附着于旋转刷子的头发、灰尘等异物沿着毛的纹路移动到旋转刷子的末端部,也可以阻止穿过第二毛和第三毛向第一轴构件移动的现象。
61.根据本发明的实施例,由于在旋转轴下方配置的第一b肋和第二b肋分别与地面形成规定距离,随着靠近旋转轴的正下方增加第二毛和第三毛的体积密度,因此,可以阻止地板面上的头发、灰尘等异物从旋转刷子的两侧末端部穿过第二毛和第三毛向第一轴构件和第三轴构件方向移动的现象。
62.根据本发明的实施例,由于第一a肋和第二a肋与主体的旋转轴形成规定距离的同时,随着地板面的异物靠近能够直接渗透到第一轴构件和第三轴构件侧的旋转轴的正下方,第二毛和第三毛的体积密度增加,因此,可以最小化整体旋转力的损失量,并可以阻止
地板面上的异物的直接渗透。
附图说明
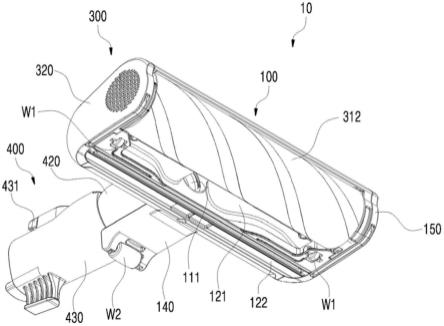
63.图1是表示本发明一实施例的真空吸尘器的立体图。
64.图2是表示在上方观看图1的真空吸尘器的吸嘴的立体图。
65.图3是表示在下方观看图1的真空吸尘器的吸嘴的立体图。
66.图4是图2的吸嘴的分解立体图。
67.图5是图2的吸嘴的剖视图。
68.图6是表示图2的吸嘴中分离出刷子模块的状态的立体图。
69.图7是图6的刷子模块的分解立体图。
70.图8是表示图7的装拆盖的部分立体图。
71.图9是表示图2的吸嘴的第二肋的部分剖视图。
72.图10是表示在下方观看图2的吸嘴的第二肋的部分立体图。
73.图11是表示图2的吸嘴的主视图。
74.图12是表示图11的吸嘴的剖视图。
75.图13是图12的b部分的放大图。
76.图14是根据图12的b部分放大图的其他实施例。
77.图15是表示图6的吸嘴中第一轴构件的部分立体图。
78.图16是表示图2的吸嘴的第一肋的部分剖视图。
79.图17是表示在下方观看图2的吸嘴的第一肋的部分立体图。
80.图18是图12的c部分的放大图。
81.图19是根据图12的c部分放大图的其他实施例。
82.附图的主要部分的标记说明
83.1:真空吸尘器
84.10:吸嘴
85.100:壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300:刷子模块
86.101:吸入空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310:旋转刷子
87.110:本体壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311:主体
88.111:入口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311a:凸出部
89.112:引导轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312:刷子构件
90.112a:第一墙部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312a:第一毛
91.113:第一肋
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312b:第二毛
92.113a:第一a肋
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312c:第三毛
93.113b:第一b肋
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313:第二轴构件
94.120:底部壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
314:第三轴构件
95.121:第一底部壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
320:装拆盖
96.122:第二底部壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321:第二肋
97.130:安装壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321a:第二a肋
98.140:支撑壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321b:第二b肋
99.141:按钮部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
322:衬套
100.150:侧面盖
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
323:凸出肋
101.w1:第一轮子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
324:凸起
102.w2:第二轮子
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400:连接器
103.200:驱动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401:通道
104.210:支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
410:插入部
105.220:马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
420:第一连接部
106.230:传动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
430:第二连接部
107.231:第一轴构件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
431:拆卸按钮部件
108.20:本体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
440:结合部
109.21:把手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
450:伸缩管道
110.22:灰尘筒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
451:伸缩管
111.30:延伸管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
452:螺旋弹簧
具体实施方式
112.以下,参照附图对本发明的优选实施例进行详细说明。需要说明的是,在说明本发明时,为了明确本发明的要旨,将省略对已公知的功能或者构成的说明。
113.图1是根据本发明一实施例的真空吸尘器1的立体图。
114.如图1所示,根据本发明一实施例的真空吸尘器1构成为包括本体20和吸嘴10。
115.吸嘴10通过延伸管30与本体20连接。吸嘴10也可以与本体20直接连接。用户可以抓住形成于本体20的把手21,使放置于地板面的吸嘴10向前后移动。
116.本体20是形成空气压力差的结构。在本体20的内部设置有送风机。如果送风机形成空气压力差,则地板上的灰尘和异物通过吸嘴10的入口111和延伸管30向本体20移动。
117.在本体20的内部可以设置有离心分离式集尘装置。灰尘和异物可以被收纳于灰尘桶22。
118.图2是表示在上方观看图1的真空吸尘器1的吸嘴10的立体图。图3是表示在下方观看图1的真空吸尘器1的吸嘴10的立体图。图4是图2的吸嘴10的分解立体图。
119.吸嘴10是利用空气压力差吸入地板上的灰尘的结构。吸嘴10构成为包括壳体100、驱动部200、刷子模块300以及连接器400。
120.本发明的主要技术特征在于刷子模块300的旋转刷子310。因此,要对壳体100、驱动部200以及连接器400进行概略的说明。
121.为了便于理解本发明,在下面将旋转刷子310侧称作吸嘴10的前方、前部,将连接器400方向称作吸嘴10的后方、后部。
122.图1至图3中图示了三维直角坐标系。三维直角坐标系的x轴所指的方向是指所述前方、前部。三维直角坐标系的y轴所示的方向是指与旋转刷子的旋转轴平行的方向。三维直角坐标系的z轴所指的方向是指上方。
123.吸嘴10的组装顺序如下:首先,组装连接器400。然后组装连接器400和安装壳体130。安装壳体130能够旋转地安装于连接器400。之后在本体壳体110的一侧面结合驱动部200。
124.其次,将安装壳体130结合于本体壳体110的上部。然后,将底部壳体120结合于本体壳体110的下部。之后,将支撑壳体140结合于本体壳体110的下部。然后,将按钮部件141安装于支撑壳体140。其后,将侧面盖150结合于本体壳体110的一侧面。
125.最后,在旋转刷子310的第二轴构件313插入第一轴构件231,将装拆盖320拆卸结合于本体壳体110的另一侧面。由此完成吸嘴10的组装。
126.图5是图2的吸嘴10的剖视图。
127.如图4和图5中所示,壳体100是将地板上的灰尘和异物引导至连接器400的通道401的构成。
128.壳体100构成为包括本体壳体110、底部壳体120、安装壳体130以及支撑壳体140。
129.本体壳体110形成有灰尘向本体20移动的入口111。入口111在本体壳体110的后部形成。入口111是圆筒形状。在本体壳体110的前方安装有旋转刷子310。
130.旋转刷子310通过驱动部200旋转。旋转刷子310将地板面上的灰尘和异物刮擦并推向后部。推向旋转刷子310后部的灰尘和异物可能很容易进入入口111。本体壳体110在旋转刷子310与入口111之间覆盖地板面的上部。
131.在旋转刷子310和入口111之间,壳体100在与地板面之间形成空间(以下,称作
‘
吸入空间101’)。吸入空间101除壳体100与地板之间的空隙外,与外部隔离。吸入空间101的灰尘和异物通过入口111进入通道401。
132.如图4和图5所示,底部壳体120和本体壳体110一同形成吸入空间101。
133.底部壳体120包括第一底部壳体121和第二底部壳体122。第一底部壳体121和第二底部壳体122在旋转刷子310与入口111之间形成墙面,从而使吸入空间101的灰尘和异物引导至入口111方向。在第二底部壳体122安装有一对第一轮子w1。
134.安装壳体130能够旋转地与连接器400结合。安装壳体130的盖部131安装于本体壳体110的上部。
135.支撑壳体140支撑吸嘴10和连接器400的下部。在支撑壳体140安装有第二轮子w2。第二轮子w2和一对第一轮子w1一同旋转并在地板面滚动。
136.连接器400是使本体20和吸嘴10相对旋转的构成。另外,连接器400在内部形成灰尘向本体20移动的通道401。
137.连接器400包括插入部410、第一连接部420、第二连接部430、结合部440以及伸缩管道450。
138.如果盖部131安装于本体壳体110的上部,则插入部410插入到入口111的内侧。
139.结合部440使安装壳体130和连接器400以插入部410为中心能够旋转地连接。
140.第一连接部420和第二连接部430分别形成管道形状。第一连接部420和第二连接部430能够旋转地结合。
141.在第二连部430的上部形成有拆卸按钮部件431。拆卸按钮部件431与卡止部432连接。延伸管30被卡止部432阻止移动。
142.如图5所示,伸缩管道450在入口111与第二连接部430之间形成通道401。伸缩管道450构成为包括伸缩管451和螺旋弹簧452。
143.伸缩管451在内部形成通道401。伸缩管451是圆筒形状,伸缩管451由柔性树脂制成。
144.因此,在第一连接部420和第二连部430相对旋转,以及安装壳体130和第一连接部420相对旋转时,伸缩管451发生弹性的变形。
145.螺旋弹簧452附着于伸缩管451的内面或者外表面。螺旋弹簧452保持伸缩管451的圆筒形状。
146.如图4和图5所示,驱动部200是使旋转刷子310旋转的构成。驱动部200与本体壳体110的一侧面(以下,称作
‘
左侧面’)结合。
147.侧面盖150覆盖驱动部200。侧面盖150在壳体100的左侧面通过钩子等卡止结构结合。在侧面盖150形成有空气出入的孔。
148.驱动部200构成为包括支架210、马达220以及传动装置230。
149.支架210与本体壳体110螺栓结合。马达220是产生旋转力的构成。马达220可以用无刷直流马达(bldc:brushless direct current motor)来设置。马达220与支架210结合。
150.传动装置230是向旋转刷子310传递马达220的旋转运动的构成。传动装置230安装于支架210上。传动装置230可以由皮带传动装置来设置。
151.如图4所示,第一轴构件231是向旋转刷子310传递皮带传动装置的旋转运动的构成。在旋转刷子310的旋转轴方向一侧设置有第二轴构件313。
152.第一轴构件231和第二轴构件313形成彼此衔接的多个面。如果第一轴构件231和第二轴构件313彼此咬合,则第一轴构件231的旋转轴和第二轴构件313的旋转轴位于同一线上。主体311和第三轴构件314的旋转轴也均位于同一线上。以下,
‘
旋转轴’可以理解为是指主体311的旋转轴。
153.第一轴构件231的旋转力通过接触面传递到第二轴构件313。在第一轴构件231和第二轴构件313衔接的状态下,旋转刷子310的旋转轴与第一轴构件231的旋转轴位于同一线上。
154.图6是表示图2的吸嘴10中分离出刷子模块300状态的立体图。图7是表示图6的刷子模块300的分解立体图。
155.如图6和图7所示,刷子模块300构成为包括旋转刷子310和装拆盖320。
156.旋转刷子310将地板面上的灰尘和异物推向后部。旋转刷子310构成为包括主体311、刷子构件312、第二轴构件313以及第三轴构件314。
157.主体311形成旋转刷子310的骨架。主体311是内部空的圆筒形状。主体311的中心轴起到旋转刷子310中心轴的作用。主体311沿着圆周方向形成均匀的旋转惯性(rotational inertia)。主体311可以由合成树脂或者金属材质制成。
158.刷子构件312附着于主体311的外表面。刷子构件312构成为包括多个毛。主体311旋转时,由于多个毛因与地板进行摩擦而产生弹性弯曲变形,并将地板上的异物推向入口侧。虽然未图示,在主体311的外表面附着有纤维层,多个毛可以附着于纤维层。
159.第二轴构件313是接受第一轴构件231的旋转运动传递的结构。第二轴构件313插入于主体311的一侧开口内。
160.在第二轴构件313的外表面形成有插入槽313h。在主体311的内面沿着长度方向形成有凸出部311a。当第二轴构件313插入于主体311的开口时,凸出部311a插入到插入槽313h。凸出部311a阻止第二轴构件313的相对旋转。
161.第二轴构件313形成插入第一轴构件231的空间。如果旋转刷子310向轴方向移动,
则第一轴构件231插入于第二轴构件313内。
162.第一轴构件231和第二轴构件313形成彼此衔接的多个面。如果第一轴构件231和第二轴构件313彼此衔接,则第一轴构件231的旋转轴和第二轴构件313的旋转轴位于同一线上。
163.第一轴构件231的旋转力通过接触面传递到第二轴构件313。在第一轴构件231和第二轴构件313咬合的状态下,旋转刷子310的旋转轴和第一轴构件231的旋转轴位于同一线上。
164.第三轴构件314是将主体311与装拆盖320能够旋转地连接的结构。第三轴构件314设置于主体311的另一侧开口内。第三轴构件314插入于主体311的另一侧开口内。
165.在第三轴构件314的外表面形成有插入槽314h。在主体311的内面沿着长度方向形成有凸出部311a。当第三轴构件314插入于主体311的开口时,凸出部311a插入到插入槽314h。凸出部311a阻止第三轴构件314的相对旋转。
166.在第三轴构件314安装有轴承b。在装拆盖320设置有固定轴a。轴承b使固定轴a能够旋转地支撑。在固定轴a形成有槽,在槽安装有卡环s来防止固定轴a和第三轴构件314的分离。
167.图8是表示图7的装拆盖的部分立体图。
168.如图8所示,装拆盖320在与第一轴构件231的相反侧使旋转刷子310能够旋转地支撑。在装拆盖320形成有衬套322、凸出肋323以及第一凸起324。
169.衬套322是固定轴a结合的部分。喷射装拆盖320时,固定轴a可以嵌入于模具。衬套322在装拆盖320的内侧面形成。在此,内侧面是指朝向壳体100的一面。
170.凸出肋323是在装拆盖320的内侧面使第一凸起324隔开规定间隔的部分。凸出肋323在装拆盖320的内侧面形成。凸出肋323以衬套322为中心沿着圆周方向形成。
171.在凸出肋323形成有多个的第一凸起324。多个第一凸起324在凸出肋323向衬套322侧凸出。多个第一凸起324以固定轴a为中心沿着圆周方向彼此隔开。
172.第一凸起324通过凸出肋323与装拆盖320的内侧面形成规定间隔。第一凸起324被引导至引导轨道112的外表面并可以朝双向旋转。
173.如图6所示,在本体壳体110的一侧面(以下,称作
‘
右侧面’)形成有引导轨道112和多个第一墙部112a。
174.引导轨道112在本体壳体110的右侧面形成。引导轨道112以第一轴构件231的旋转轴为中心沿着圆周方向形成。
175.引导轨道112的外表面以第一轴构件231的旋转轴为中心引导第一凸起324的旋转。第一凸起324可以被引导至引导轨道112的外表面,并以旋转轴为中心双向旋转。
176.第一墙部112a在引导轨道112的外表面形成。第一墙部112a从引导轨道112的外表面凸出。第一凸起324旋转并可以进入到第一墙部112a与本体壳体110之间。此时,第一墙部112a阻止第一凸起324的轴方向移动。此外,第一墙部112a阻止第一凸起324朝一侧方向旋转。
177.如图6所示,在支撑壳体140安装有按钮部件141。按钮部件141有选择性地阻止装拆盖320的旋转。因此,装拆盖320可以以旋转刷子310的旋转轴为中心旋转并与壳体100可拆卸地结合。
178.图9是表示图2的吸嘴10的第二肋321的部分剖视图。
179.如图8和图9所示,装拆盖320上形成有第二肋321。
180.第二肋321在装拆盖320的内侧面向主体311的旋转轴方向凸出,以便与刷子构件312接触。第二肋321夹设于装拆盖320与刷子构件312之间并阻止装拆盖320与刷子构件312之间发生缝隙。
181.第二肋321构成为包括第二a肋321a和第二b肋321b。第二a肋321a和第二b肋321b彼此连接。
182.第二a肋321a形成于旋转轴前方。第二a肋321a在旋转轴前方与毛接触。第二a肋321a与主体311的旋转轴形成规定距离r3a。第二a肋321a以主体311的旋转轴为中心沿着圆周方向形成。
183.以主体311的旋转轴为中心的刷子构件312的最外围半径r1,比主体311的旋转轴与第二a肋321a之间的距离r3a还长。因此,即使旋转刷子310旋转,第二a肋321a和刷子构件312持续地保持接触面。
184.在图9中,a表示第二a肋321a以旋转轴为中心沿着圆周方向被设置的区域。掉在地板上的头发等异物在地板面上可以形成一定高度。因此,a区域比头发等异物的高度越高越有利。
185.如上所述,本体壳体110沿着圆周方向覆盖旋转刷子310的上部。并且,装拆盖320以旋转刷子310的旋转轴为中心旋转,并可拆卸地结合于壳体100。因此,a区域的最上端可以以装拆盖320的旋转角度程度与本体壳体110隔开。
186.第二b肋321b设置于旋转轴下方。第二b肋321b在旋转轴下方与毛接触。第二b肋321b与地板平行。第二b肋321b与地板形成规定距离。因此,第二b肋321b在主体311中心轴的正下方与主体311的中心轴形成最短距离r3b。
187.图9中,l是指第二b肋321b以直线形式被设置的区域。在第二a肋321a和第二b肋321b彼此连接的部位,第二b肋321b与主体311的旋转轴之间的距离和r3a相同。
188.如上所述,以主体311的旋转轴为中心的刷子构件312的最外围半径r1,比主体311的旋转轴与第二a肋321a之间的距离r3a还长。
189.并且,第二b肋321b与主体311的旋转轴之间的最长距离是r3a。因此,即使旋转刷子310旋转,第二b肋321b和刷子构件312也持续地保持接触面。
190.图10是在下方观看图2的吸嘴10的第二肋321的部分立体图。
191.如图10所示,第二肋321夹设于装拆盖320与刷子构件312之间,并阻止在装拆盖320与刷子构件312之间发生空隙。因此,地板上的灰尘、头发等异物不能进入装拆盖320与刷子构件312之间。
192.随着旋转刷子310的旋转,附着于刷子构件312的异物被第二底部壳体122的倾斜面推移而移动到吸入空间101。
193.向吸入空间101移动的灰尘和异物通过入口111进入通道401。图10的虚线表示附着于刷子构件312的异物向吸入空间101移动的路径。
194.图11是表示图2的吸嘴10的正视图。图12是表示图11的吸嘴10的剖视图。
195.如图11和图12所示,在真空吸尘器1运转时,刷子构件312的下部与地板面接触。此时,壳体100和装拆盖320与地板面隔开。
196.图13是图12的b部分的放大图。
197.如图13所示,多个毛是由因外力而容易弹性弯曲变形的柔软的材质(绒)来制成。多个毛根据弹性弯曲变形的形状,可以分为第一毛312a、第二毛312b以及第三毛312c。第一毛312a、第二毛312b以及第三毛312c形成为多个。
198.第一毛312a是指与第二肋321隔开的毛。
199.第一毛312a并不因第二肋321而弹性弯曲变形。在主体311旋转时,第一毛312a仅通过与地板进行摩擦而弹性弯曲变形。第一毛312a在弹性弯曲变形的同时将地板上的异物推向入口111侧。
200.图13中,仅表示了一个第一毛312a。第一毛312a应该理解为除了d1和d2区间之外密密麻麻地存在于其他区间。
201.第二毛312b是指,夹设于主体311的外表面和第二肋321之间的毛。
202.当主体311与装拆盖320可旋转地连接时,第二毛312b可以夹设于主体311的外表面和第二肋321之间。在主体311旋转时,第二毛312b因与第二肋321进行摩擦而弹性弯曲变形。
203.图13中,d1是指,第二毛312b所位于的区间。随着第二肋321沿着旋转轴方向凸出的长度增加,d1的长度增加。即,d1的长度与第二肋321凸出的长度成正比地增加。
204.图13中,仅表示了一个第二毛312b。第二毛312b应该理解为密密麻麻地存在于d1区间内。
205.如图13所示,第二肋321比地板面更靠近主体311的外表面。即,主体311的外表面与地板面之间的距离,比主体311的外表面与第二肋321之间的距离还长。因此,在主体311旋转时,第二毛312b的弹性弯曲变形量大于第一毛312a的弹性弯曲变形量。
206.体积密度(bulk density)是指,包括纤维体等填充空间的密度。附着于主体311的毛通过某物体而弹性弯曲变形的量,与主体311和物体之间的距离成正比。
207.主体311和物体之间的距离更近,即,毛被物体越挤压,毛的弹性弯曲变形量越大。因此,第二毛312b的体积密度比第一毛312a的体积密度(bulk density)高。
208.第三毛312c是指,被第二肋321推动而朝旋转轴方向弹性弯曲变形的毛。
209.当主体311与装拆盖320可旋转地连接时,第三毛312c可能被第二肋321推向旋转轴方向。并且,在主体311旋转时,第三毛312c因与地板进行摩擦可以进一步弹性弯曲变形。
210.图13中,d2是指,第三毛312c所位于的区间。如果存在d1区间,则与第二肋321向旋转轴方向凸出的长度无关,d2的长度是恒定的。
211.图14是图12的b部分放大图的其他实施例。图14表示d1区间不存在的情况。如果第二肋321朝旋转轴方向凸出的长度较短,则d1区间可以不存在。
212.如图14所示,如果d1区间不存在,则第二肋321与旋转轴方向凸出的长度成比例增加d2的长度。即,如果d1区间不存在,则d2的长度与第二肋321凸出的长度成正比地增加。
213.图13和图14中,仅表示了一个第三毛312c。第三毛312c应理解为密密麻麻地存在于d2区间内。
214.如图13和图14所示,在主体311未旋转时,第三毛312c也被第二肋321推动并处于沿旋转轴方向弹性弯曲变形的状态。
215.并且,在主体旋转时,第三毛312c因与地板进行摩擦可以进一步弹性弯曲变形。因
此,在主体311旋转时,第三毛312c的整体弹性弯曲变形量大于第一毛312a的弹性弯曲变形量。
216.在主体311未旋转时,第三毛312c也被第二肋321推动而彼此靠近。随着毛彼此靠近其体积密度(bulk density)增加。因此,第三毛312c的体积密度高于第一毛312a的体积密度。
217.如上所述,第二毛312b和第三毛312c的体积密度高于第一毛312a的体积密度。因此,可以阻止地板上的灰尘、头发等异物穿过毛之间向第三轴构件314方向移动的危险性。
218.如上所述,第二毛312b与地板形成规定的距离。因此,第二毛312b在主体311中心轴的正下方与主体311的中心轴形成最短距离r3b。
219.并且,主体311的中心轴与第二b肋312b之间的距离,随着从主体311中心轴的正下方变远,其距离逐渐增加。
220.如果第二肋321和主体311的外表面之间的距离d3变短,则第二毛312b的弹性弯曲变形量变大。因此,第二毛312b的体积密度增加。
221.并且,如果第二肋321与主体311的外表面之间的距离d3变短,则弹性弯曲变形的第三毛312c的数量增加。即,如果第二肋321与主体311的外表面之间的距离d3变短,则第三毛312c的体积密度增加。因此,随着第二毛312b和第三毛312c靠近旋转轴的正下方其体积密度增加。
222.头发、灰尘等异物在
①‘
地板面,通过毛与壳体100之间、以及毛与装拆盖320之间进入第一轴构件231和第三轴构件314,’或者
②‘
附着于毛的状态下,沿着毛的纹路向旋转刷子310的末端部移动,从而可以进入第一轴构件231和第三轴构件314。’223.①
被局限于旋转刷子310的下部。
②
沿着旋转刷子310的圆周方向规定定地发生。因此,头发、灰尘等异物主要从旋转刷子310的下部进入到第一轴构件231和第三轴构件314。
224.根据本发明一实施例的真空吸尘器1,由于随着靠近旋转轴的正下方,第二毛312b和第三毛312c的体积密度增加,因此,随着靠近头发、灰尘等异物主要渗透的旋转刷子310的下部,可以更牢固地阻止异物的渗透。
225.图15是表示图6的吸嘴10中第一轴构件231的部分立体图。图16是表示图2的吸嘴10的第一肋113的部分剖视图。
226.如图15和图16所示,在壳体100形成有第一肋113。第一肋113以与刷子构件312接触的方式在壳体100向主体311的旋转轴方向凸出。
227.第一肋113沿着第一轴构件231的周围配置。第一肋113夹设于壳体100与刷子构件312之间,并阻止壳体100与刷子构件312之间产生缝隙。
228.第一肋113构成为包括第一a肋113a和第一b肋113b。第一a肋113a和第一b肋113b彼此衔接。第一a肋113a和第一b肋113b形成包围第一轴构件231周围的形状。
229.如图16所示,第一a肋113a与主体311的旋转轴形成规定距离r2a。第一a肋113a以主体311的旋转轴为中心沿着圆周方向形成。
230.以主体311的旋转轴为中心的刷子构件312的最外围半径r1,比主体311的旋转轴与第一a肋113a之间的距离r2a还长。因此,即使旋转刷子310旋转,第一a肋113a和刷子构件312持续地保持接触面。
231.第一b肋设置于旋转轴下方。第一b肋113b在旋转轴下方与毛接触。第一b肋113b与地板形成规定距离。第一b肋113b与地板平行。因此,第一b肋113b在主体311中心轴的正下方与主体311的中心轴形成最短距离r2b。
232.在图16中,l是指第一b肋113b以直线形状被设置的区域。在第一a肋113a和第一b肋113b彼此连接的部位,第一b肋113b和主体311的旋转轴之间的距离与r2a相同。
233.如上所述,以主体311的旋转轴为中心的刷子构件312的最外围半径r1,比主体311的旋转轴与第一a肋113a之间的距离r2a还长。并且,第一b肋113b与主体311的旋转轴之间的最长距离是r2a。因此,即使旋转刷子310旋转,第一b肋113b和刷子构件312持续地保持接触面。
234.图17是表示在下方观看图2的吸嘴10的第一肋113的部分立体图。
235.如图17所示,第一肋113夹设于壳体100与刷子构件312之间,并阻止在壳体100与刷子构件312之间产生缝隙。
236.第一a肋113a和第一b肋113b形成包围第一轴构件231周围的形状。因此,头发、灰尘等异物不能进入壳体100与刷子构件312之间。
237.随着旋转刷子310旋转,附着于刷子构件312的异物被第二底部壳体122的斜面推动,并向吸入空间101移动。向吸入空间101移动的灰尘和异物通过入口111进入通道401。图17的虚线表示附着于刷子构件312的异物向吸入空间101移动的路径。
238.图18是图12的c部分的放大图。
239.如图18所示,多个毛是由通过外力容易弹性弯曲变形的柔软的材质(绒)制成。根据多个毛弹性弯曲变形的形状,可以分为第一毛312a、第二毛312b以及第三毛312c。第一毛312a、第二毛312b以及第三毛312c分别形成有多个。
240.第一毛312a是指从第一肋113隔开的毛。第一毛312a不被第一肋113弹性弯曲变形。在主体311旋转时,第一毛312a仅通过与地板进行摩擦而弹性弯曲变形。第一毛312a在弹性弯曲变形的同时,将地板上的异物推向入口111侧。
241.图18中,仅表示了一个第一毛312a。第一毛312a应该理解为除d1和d2之外密密麻麻地存在于其他区间。
242.第二毛312b是指,夹设于主体311的外表面与第一肋113之间的毛。将旋转刷子310的第二轴构件313插入于第一轴构件231时,第二毛312b可以夹设于主体311的外表面与第一肋113之间。在主体311旋转时,第二毛312b因与第一肋113进行摩擦而弹性弯曲变形。
243.图18中,d1是指,第二毛312b所位于的区间。随着第一肋113向旋转轴方向凸出的长度增加,d1的长度增加。即,d1的长度与第一肋113凸出的长度成正比地增加。在图18中,仅表示了一个第二毛312b。第二毛312b应该理解为密密麻麻地存在于d1区间内。
244.如图18所示,第一肋113比地板面更靠近主体311的外表面。即,主体311的外表面与地板面之间的距离,比主体311的外表面与第一肋113之间的距离还长。因此,在主体311旋转时,第二毛312b的弹性弯曲变形量大于第一毛312a的弹性弯曲变形量。
245.体积密度(bulk density)是指,包括纤维体等填充空间的密度。附着于主体311的毛因某物体而弹性弯曲变形的量,与主体311和物体之间的距离成比例。
246.随着主体311和物体之间的距离变得更近,即,毛被物体越进一步挤压,毛的弹性弯曲变形量越大。因此,第二毛312b的体积密度高于第一毛312a的体积密度。
247.第三毛312c是指,被第一肋113推动而向旋转轴方向弹性弯曲变形的毛。
248.当旋转刷子310的第二轴构件313插入于第一轴构件231时,第三毛312c可能被第一肋113推向旋转轴方向。并且,在主体311旋转时,第三毛312c因与地板进行摩擦可以进一步弹性弯曲变形。
249.在图18中,d2是指,第三毛312c所位于的区间。如果d1区间存在,则与第一肋113向旋转轴方向凸出的长度无关,d2的长度是恒定的。
250.图19是根据图12的c部分的放大图的其他实施例。图19表示d1区间不存在的情况。如果第一肋113向旋转轴方向凸出的长度较短,则d1区间可以不存在。
251.如图19所示,如果d1区间不存在,则d2的长度与第一肋113向旋转轴方向凸出的长度成比例而增加。即,如果d1区间不存在,则d2的长度与第一肋113凸出的长度成正比地增加。
252.在图18和图19中仅表示一个第三毛312c。第三毛312c应该理解为密密麻麻地存在于d2区间内。
253.如图18和图19所示,在主体311未旋转时,第三毛312c也被第一肋113推动而处于向旋转轴方向弹性弯曲变形的状态。并且,在主体311旋转时,第三毛312c因与地板进行摩擦可以进一步弹性弯曲变形。
254.因此,在主体311旋转时,第三毛312c的整体弹性弯曲变形量可以大于第一毛312a的弹性弯曲变形量。
255.在主体311未旋转时,第三毛312c也被第一肋113推动而彼此变得近。随着毛彼此靠近其体积密度(bulk density)增加。因此,第三毛312c的体积密度大于第一毛312a的体积密度。
256.如上所述,第二毛312b和第三毛312c的体积密度大于第一毛312a的体积密度。因此,可以阻止灰尘、头发等异物穿过毛之间向第三轴构件314方向移动的危险性。
257.如上所述,第一b肋113b与地板形成规定的距离。因此,第一b肋113b在主体311中心轴的正下方与主体311的中心轴形成最短距离r2b。
258.并且,主体311的中心轴与第一b肋113b之间的距离,随着从主体311中心轴的正下方变远,其距离逐渐增加。
259.如果第一肋113和主体311的外表面之间的距离d3变短,则第二毛312b的弹性弯曲变形量变大。因此,第二毛312b的体积密度增加。
260.另外,如果第一肋113和主体311的外表面之间的间距d3变短,则弹性弯曲变形的第三毛312c的数量增加。即,如果第一肋113和主体311的外表面之间的距离d3变短,则第三毛312c的体积密度增加。
261.因此,随着第二毛312b和第三毛312c靠近旋转轴的正下方,其体积密度增加。
262.发丝、灰尘等异物在
①‘
地板面,可以穿过毛和壳体100之间、以及毛和装拆盖320之间并进入第一轴构件231和第三轴构件314,’或者,
②‘
附着于毛的状态下,沿着毛的纹路移动到旋转刷子310的末端部,从而可以进入第一轴构件231和第三轴构件314。’263.①
局限于旋转刷子310的下部。
②
沿着旋转刷子310的圆周方向规定地发生。因此,头发、灰尘等异物主要从旋转刷子310的下部进入第一轴构件231和第三轴构件314。
264.根据本发明一实施例的真空吸尘器1,不仅可以沿着旋转刷子310的圆周方向阻止
异物的渗透,而且,由于随着靠近旋转轴的正下方,第二毛312b和第三毛312c的体积密度增加,因此,随着靠近发丝、灰尘等异物主要渗透的旋转刷子310的下部,可以进一步牢固地阻止异物的渗透。
265.以上,已对本发明的特定实施例进行了说明并图示,但是,本发明并不局限于已记载的实施例,在不脱离本发明的思想和范围内可以进行各种修正和变形是对本领域技术人员来说是显而易见的。因此,对于那些修正例或者变形例,不应该离开本发明的技术思想或者观点被单独地理解,变形的实施例也应属于本发明的保护范围。
266.【产业利用的可能性】
267.根据本发明的真空吸尘器,沿着第一轴构件的周围配置的第一肋,在壳体向主体的旋转轴方向凸出,从而体积密度较大的第二毛和第三毛沿着刷子构件的圆周方向被配置,因此,即使附着于旋转刷子上的头发、灰尘等异物沿着毛的纹路移动到旋转刷子的末端部,也可以阻止穿过第二毛和第三毛向第一轴构件方向移动的现象。这一点来看,本发明是,随着超越现有技术的界限,不仅对相关技术的利用充分适用相关技术的装置的上市或者营业的可能性,而且,能够实际上明确地实施的程度,因此,在产业上有利用可能性的发明。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。