1.本技术涉及自动清洁设备的领域,尤其是涉及一种扫拖一体机器人的清洁机构。
背景技术:
2.随着人们对智能生活的追求日益增长,扫地机器人逐渐走进了人们的家庭中;扫地机器人能够自动完成家庭地面的清洁,减少了人们做家务的负担。
3.目前许多扫地机器人还增设了拖地的功能,这种加设新功能的机器人也被称之为扫拖一体机器人,扫拖一体机器人能够边扫地边进行拖地工作;拖地时,扫拖一体机器人将水喷洒至机器的清洁布,并驱动清洁布旋转;清洁布于地面抵接的同时旋转,起到了擦拭地面的作用。
4.为了增加扫拖一体机器人的拖地面积,扫拖一体机器人通常设有若干块拖布;现有的拖布与扫拖一体机器人的位置相对固定,当扫拖一体机器人在并不平整的地面进行拖地工作时,部分拖布可能处于悬空状态,导致清洁效果下降。
技术实现要素:
5.为了提高扫拖一体机器人在不平整地面工作时的清洁效果,本技术提供一种扫拖一体机器人的清洁机构。
6.本技术提供的一种扫拖一体机器人的清洁机构采用如下的技术方案:
7.一种扫拖一体机器人的清洁机构,包括机器人本体,所述机器人本体设有旋转驱动系统;清洁机构还包括若干组旋转拖地组件,所述旋转拖地组件包括清洁部件和连接部件,所述清洁部件与连接部件通过弹性部件连接;所述旋转驱动系统用于驱动连接部件旋转。
8.通过采用上述技术方案,扫拖一体机器人在不平整的地面进行清洁工作时,旋转拖地组件驱动连接部件旋转,连接部件带动清洁部件旋转,且清洁部件与地面抵接;由于清洁部件与连接部件通过弹性部件连接,则扫拖一体机器人移动至不平整的位置时,弹性部件受压收缩,使得若干个清洁部件仍处于同一水平面;减少了部分清洁案件处于悬空状态的情况发生,进而提高了扫拖一体机器人在不平整地面工作时的清洁效果。
9.可选的,所述机器人本体设有若干根连接柱,所述连接柱与连接部件磁吸连接。
10.通过采用上述技术方案,旋转驱动系统驱动连接柱转动,连接柱带动连接部件转动,进而达到了旋转驱动系统驱动连接部件转动的效果;设置与连接柱磁吸连接的连接部件,便于使用者将旋转拖地组件自扫拖一体机器人取下,进而达到了便于使用者维护旋转拖地组件的效果。
11.可选的,所述连接部件包括连接筒,所述连接筒设有连接插槽,所述连接筒通过连接插槽与对应的连接柱插接。
12.通过采用上述技术方案,安装连接柱时,将连接柱与对应的连接筒插接;连接插槽的设置减少了人工对准连接柱、连接筒的步骤,达到了提高连接柱的安装效率的效果。
13.可选的,所述连接部件还包括连接盘,所述连接盘与连接筒远离连接柱的一端固定连接;所述连接盘与清洁部件通过弹性部件连接。
14.通过采用上述技术方案,当扫拖一体机器人移动至不平整的位置时,弹性部件受压收缩,清洁部件向靠近连接盘的方向移动。
15.可选的,所述清洁部件包括清洁安装盘和清洁布,所述清洁安装盘通过弹性部件与连接盘连接;所述清洁布与清洁安装盘可拆卸连接。
16.通过采用上述技术方案,扫拖一体机器人工作时,清洁布与地面抵接;对清洁布进行清洁时,将清洁布自清洁安装盘取下;设置与清洁安装盘可拆卸连接的清洁布便于使用者对清洁布进行清洗。
17.可选的,所述清洁安装盘设有魔术贴层,所述清洁布通过魔术贴层与清洁安装盘粘接。
18.通过采用上述技术方案,将清洁布安装于清洁安装盘时,清洁布通过魔术贴层与清洁安装盘粘接;设置魔术贴层便于清洁布的安装与取下,且魔术贴层有着耐用的特性,提高了清洁安装盘的实用性。
19.可选的,所述弹性部件为弹簧,所述弹簧的一端与清洁安装盘连接,所述弹簧的另一端与连接盘连接。
20.通过采用上述技术方案,当清洁安装盘受到的压力增加时,弹簧受力收缩,清洁安装盘向靠近连接盘的方向移动;当清洁安装盘受到的压力减小时,弹簧伸展回原,清洁安装盘向远离连接盘的方向移动。
21.可选的,所述清洁安装盘设有弹簧安装筒,所述弹簧安装筒设有弹簧插槽;所述弹簧与弹簧插槽底部的槽壁固定连接。
22.通过采用上述技术方案,弹簧收缩时,弹簧带动弹簧安装筒移动,进而带动清洁安装盘移动。
23.可选的,所述清洁安装盘设有若干个用于令水流通过的第一出水孔道,所述连接盘亦设有若干个第二出水孔道;所述第一出水孔道与对应的第二出水孔道连通。
24.通过采用上述技术方案,机器人本体将水喷洒至旋转拖地组件时,水通过第二出水孔道流向第一出水孔道,第一出水孔道内的水再流向清洁布,水被清洁布吸收。
25.可选的,所述连接盘设有筒限位槽,所述弹簧安装筒通过筒限位槽与连接盘滑动连接。
26.通过采用上述技术方案,当弹簧安装筒移动时,筒限位槽限制了弹簧安装筒的移动方向,减少了弹簧安装筒偏移的情况发生。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.1、扫拖一体机器人在不平整的地面进行清洁工作时,旋转拖地组件驱动连接部件旋转,连接部件带动清洁部件旋转,且清洁部件与地面抵接;由于清洁部件与连接部件通过弹性部件连接,则扫拖一体机器人移动至不平整的位置时,弹性部件受压收缩,使得若干个清洁部件仍处于同一水平面;减少了部分清洁案件处于悬空状态的情况发生,进而提高了扫拖一体机器人在不平整地面工作时的清洁效果;
29.2、旋转驱动系统驱动连接柱转动,连接柱带动连接部件转动,进而达到了旋转驱动系统驱动连接部件转动的效果;设置与连接柱磁吸连接的连接部件,便于使用者将旋转
拖地组件自扫拖一体机器人取下,进而达到了便于使用者维护旋转拖地组件的效果;
30.3、安装连接柱时,将连接柱与对应的连接筒插接;连接插槽的设置减少了人工对准连接柱、连接筒的步骤,达到了提高连接柱的安装效率的效果。
附图说明
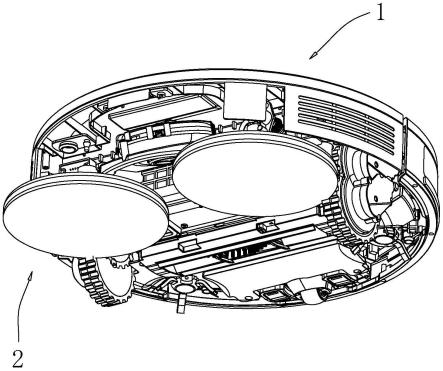
31.图1是本技术实施例所述扫拖一体机器人的结构示意图。
32.图2是本技术实施例的爆炸示意图。
33.图3是本技术实施例所述连接部件的爆炸示意图。
34.图4是本技术实施例所述清洁部件的爆炸示意图。
35.附图标记说明:
36.1、机器人本体;11、连接柱;2、旋转拖地组件;21、清洁部件;211、清洁安装盘;212、清洁布;213、魔术贴层;214、弹簧安装筒;215、弹簧插槽;216、第一出水孔道;22、连接部件;221、连接筒;222、连接插槽;223、连接盘;224、第二出水孔道;225、筒限位槽;3、弹簧。
具体实施方式
37.以下结合附图1-4对本技术作进一步详细说明。
38.本技术实施例公开一种扫拖一体机器人的清洁机构。
39.参照图1,一种扫拖一体机器人包括机器人本体1和若干组旋转拖地组件2;参照图1和图2,机器人本体1设有若干根连接柱11,每一个连接柱11与其中一组旋转拖地组件2连接。旋转拖地组件2包括清洁部件21和连接部件22,清洁部件21用于与地面抵接,连接部件22通过弹簧3与清洁部件21连接。机器人本体1还设有用于驱动连接柱11旋转的旋转驱动系统。
40.当扫拖一体机器人工作时,旋转驱动系统驱动连接柱11旋转,连接柱11带动旋转拖地组件2旋转;此时若干组旋转拖地组件2均与地面抵接,则旋转拖地组件2进行旋转擦拭地面的动作。当扫拖一体机器人移动至地面不平整的地方时,部分旋转拖地组件2的清洁部件21受到的压力增加,则与这部分旋转拖地组件2的清洁部件21连接的弹簧3受力压缩,这部分旋转拖地组件2的清洁部件21向靠近连接柱11的方向移动;使得若干组清洁部件21仍均与地面处于抵接状态;减少了部分清洁部件21处于悬空状态的情况发生,提高了扫拖一体机器人在不平整地面工作时的清洁效果。
41.参照图2和图3,连接部件22包括连接筒221和连接盘223,连接筒221设有连接插槽222。连接筒221通过连接插槽222与对应的连接柱11插接,且连接筒221与连接柱11磁吸连接。则连接部件22安装于连接柱11连接时,移动连接筒221,直至连接柱11插设于连接插槽222。由于连接筒221与连接柱11磁吸连接,则减少了连接柱11自动脱离连接筒221的情况发生。连接筒221远离连接柱11的一端与连接盘223固定连接,连接盘223远离连接柱11的一端与清洁部件21固定连接。则旋转驱动系统驱动连接柱11转动时,清洁部件21随之转动。
42.更进一步地,连接柱11为多边形柱体,连接插槽222的槽形状亦为对应的多边形柱体;当连接柱11插设于连接筒221时,连接柱11的各个侧面与连接插槽222对应的槽壁抵接;当连接柱11旋转时,连接柱11的各个侧面推动对应的槽面;减少了连接柱11与连接筒221相对转动的情况发生。
43.参照图2和图4,清洁部件21包括清洁安装盘211和清洁布212,清洁安装盘211通过弹簧3与连接盘223连接。清洁安装盘211设有魔术贴层213,清洁布212通过魔术贴层213与清洁布212粘接。具体地,魔术贴层213呈环状,且魔术贴层213的圆心轴与清洁安装盘211的圆心轴重合。呈环状的魔术贴层213不仅令清洁布212受到的粘力分布均匀,且减少了魔术贴的铺设面积,进而降低了生产成本。更进一步地,魔术贴层213可选但不限于一层环、两层环等数量。
44.参照图2和图4,清洁安装盘211靠近连接盘223的一侧还突伸有弹簧安装筒214,弹簧安装筒214设有弹簧插槽215,弹簧3与清洁安装盘211连接的一端插设于弹簧插槽215,且弹簧3与弹簧插槽215底部的槽壁固定连接。弹簧安装筒214限制了弹簧3的移动位置,减少了弹簧3收缩伸展时偏移的情况发生。更进一步地,连接盘223设有筒限位槽225,弹簧3的另一端插设于筒限位槽225,且弹簧3的另一端与筒限位槽225顶端的槽壁固定连接。弹簧安装筒214通过筒限位槽225与连接盘223滑动插接,滑动方向为连接盘223的轴线方向。筒限位槽225的槽壁限制了弹簧安装筒214的移动方向,减少了清洁安装盘211移动时偏移的情况发生。且筒限位槽225、弹簧安装筒214均呈多边形柱体状。
45.参照图2,清洁安装盘211还设有若干个第一出水孔道216,连接盘223设有若干个第二出水孔道224;且第一出水孔道216均与对应的第二出水孔道224连通。机器人本体1向旋转拖地组件2喷水时,水自第二出水孔道224流向第一出水孔道216,水再由第一出水孔道216流向清洁布212,清洁布212将水吸收。水令清洁布212处于湿润的状态,便于清洁布212清理地面。具体地,第一出水孔道216、第二出水孔道224呈环形分布,且环形的圆心轴与清洁安装盘211的圆心轴重合,使得清洁布212各部分吸收到的水分均匀,进一步提升了清洁布212清洁地面的效果。
46.本技术实施例的实施原理为:当扫拖一体机器人工作时,旋转驱动系统驱动连接柱11旋转,连接柱11带动旋转拖地组件2旋转;此时若干组旋转拖地组件2均与地面抵接,则旋转拖地组件2进行旋转擦拭地面的动作。当扫拖一体机器人移动至地面不平整的地方时,部分旋转拖地组件2受到的压力增加,则与这部分旋转拖地组件2连接的弹簧3受力压缩,这部分旋转拖地组件2向靠近连接柱11的方向移动;使得若干组旋转拖地组件2仍均与地面处于抵接状态;减少了部分旋转拖地组件2处于悬空状态的情况发生,提高了扫拖一体机器人在不平整地面工作时的清洁效果。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。