1.本实用新型涉及一种自动清洁设备,尤其涉及自动清洁设备上提升工作效率的结构。
背景技术:
2.2020年6月23日授权公告的中国实用新型专利第cn210810831u号揭示了一种双滚刷清洁机器人,其滚刷组件包括可拆卸地安装在清洁机器人底部的安装部,所述安装部上设有相互平行的第一滚刷和第二滚刷,且所述安装部上对应所述第一滚刷的位置处设有渗水孔,供水单元与所述渗水孔连通并向所述第一滚刷供水,从而所述双滚刷清洁机器人具有干拖和湿拖功能。
3.该种双滚刷清洁机器人虽然可以根据需要进行加水湿拖,但,其没有扫地功能,在实际使用中,如果地面污物较多时,直接进行湿拖反而使得地面更加难以清理干净、工作效率低下。
技术实现要素:
4.本实用新型的目的在于提供一种自动清洁设备,其不仅能够扫地,还能进行湿拖,可以提升工作效率。
5.为实现上述目的,本实用新型提供了一种自动清洁设备,其可自动地沿工作方向运动,以清洁地面,所述自动清洁设备包括机壳、安装在所述机壳上以驱动所述自动清洁设备行走的行走轮、安装在所述机壳上的第一清洁单元、安装在所述机壳上的第二清洁单元以及安装在所述机壳上的尘盒,所述尘盒沿所述自动清洁设备的工作方向设置在所述第一清洁单元与所述第二清洁单元之间。
6.作为本实用新型的进一步改进,所述第一清洁单元为扫地滚刷,且所述第一清洁单元沿所述工作方向设置在所述尘盒的前方。
7.作为本实用新型的进一步改进,所述自动清洁设备还包括设置在所述机壳前侧底部的前万向轮,且所述前万向轮设置在所述第一清洁单元的前方,以与所述行走轮一起配合所述扫地滚刷工作。
8.作为本实用新型的进一步改进,所述第二清洁单元为洗地滚刷,且所述第二清洁单元沿所述工作方向设置在所述尘盒的后方。
9.作为本实用新型的进一步改进,所述自动清洁设备还包括设置在所述机壳后侧底部的后万向轮,且所述后万向轮设置在所述第二清洁单元的后方,以与所述行走轮一起配合所述洗地滚刷工作。
10.作为本实用新型的进一步改进,所述自动清洁设备还包括设置在所述洗地滚刷后方的污水收集装置,所述污水收集装置与所述洗地滚刷相连,以收集所述洗地滚刷工作时产生的污水。
11.作为本实用新型的进一步改进,所述行走轮设置有一对,且该对行走轮沿垂直于
所述工作方向的横向方向间隔设置。
12.作为本实用新型的进一步改进,所述尘盒在横向方向上设置在所述一对行走轮之间。
13.作为本实用新型的进一步改进,所述第一清洁单元可沿垂直于所述工作方向及横向方向的上下方向相对所述机壳自动升降。
14.作为本实用新型的进一步改进,所述第二清洁单元可沿垂直于所述工作方向及横向方向的上下方向相对所述机壳自动升降。
15.本实用新型的有益效果是:本实用新型的自动清洁设备通过在其尘盒的两侧分别设置清洁单元,从而可以先扫后拖,增强了自动清洁设备的清洁能力,从而提升了工作效率。
附图说明
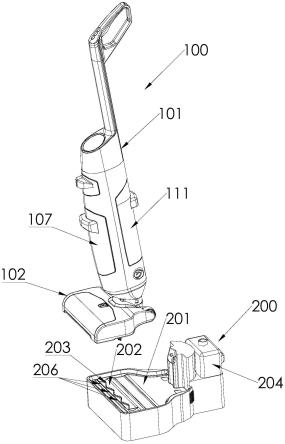
16.图1是符合本实用新型自动清洁设备的立体图。
17.图2是图1中所示的自动清洁设备的另一视角的立体图。
18.图3是图1中所示的自动清洁设备的分解图。
19.图4是图3中所示的自动清洁设备的另一视角的分解图。
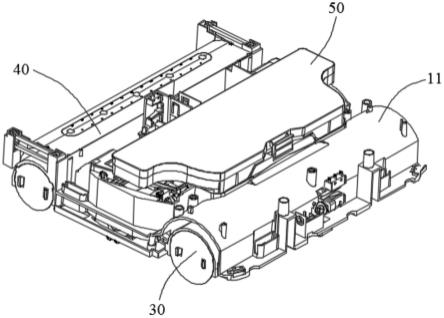
20.图5是图1中所示的自动清洁设备移除部分零件后的立体图。
21.图6是图5中所示的自动清洁设备移除部分零件后的另一视角的立体图。
具体实施方式
22.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
23.请参阅图1-6所示,本实用新型揭示了一种自动清洁设备100,其可自动地沿工作方向运动,以清洁地面。所述自动清洁设备100包括机壳10、安装在所述机壳10上的行走轮20、安装在所述机壳10上的第一清洁单元30、安装在所述机壳10上的第二清洁单元40以及安装在所述机壳10上的尘盒50。所述尘盒50沿所述工作方向设置在所述第一清洁单元30与所述第二清洁单元40之间。本技术的自动清洁设备100是一种可以独立打扫卫生的机器人,在本实施例中,其是一种扫地及拖地一体的机器人,当然也可以是其它合适的自动进行清洁工作的机器人或设备,在此不做限制。
24.所述机壳10包括设置在内部的主体11、安装在所述主体11上部的顶壳12、安装在所述主体11下部的底壳13及安装在所述主体11前部的前壳14。所述尘盒50可沿上下方向安装到所述机壳10上或从所述机壳10上取下。
25.所述行走轮20设置有一对,且该对行走轮20沿垂直于所述工作方向的横向方向间隔设置。本实施例中,每个行走轮均具有独立的驱动电机,从而可以驱动所述自动清洁设备100沿工作方向运动,以清洁地面;当然,在遇到障碍物时,行走轮20也能够自动的进行转弯或后退等。需要说明的是:行走轮20的行走、转弯、后退等均可通过现有的控制方案进行控制,此处不再举例说明,也不做任何限制。
26.所述尘盒50设置在该对行走轮20的横向方向之间。也就是说,在横向方向上,两个行走轮20分别设置在机壳10的底部两侧,而尘盒50则设置在该两个行走轮20之间,以节约
机壳10的内部空间,实现空间利用率最大化。当然,在其他实施例中,尘盒50也可以设置在机壳10的其他位置,只要能够实现对灰尘及垃圾进行收集即可,此处不作限制。
27.所述第一清洁单元30为扫地滚刷,且该扫地滚刷30在所述工作方向上设置在所述尘盒50的前方。所述第一清洁单元30可沿垂直于所述工作方向及横向方向的上下方向相对于所述机壳10自动升降,从而,当所述自动清洁设备100在工作中移动时,若工作环境发生变化,如地砖变成了地板、地毯等,或遇到障碍物时,能够通过相应的感测单元感测到环境变化,继而触动相应的驱动单元,使得所述第一清洁单元30可上下运动,以调整其与工作地面的位置关系,进而适应新的工作环境或转向进行避障。
28.所述自动清洁设备100进一步包括设置在所述机壳10上的前万向轮70,所述前万向轮70可与所述行走轮20一起工作,以配合所述扫地滚刷30工作。所述扫地滚刷30的后端与所述尘盒50相连,从而在所述第一清洁单元30工作时,可将扫起的垃圾储存在所述尘盒50里面。
29.所述第二清洁单元40为洗地滚刷,且该洗地滚刷40在所述工作方向上设置在所述尘盒50的后方。所述第二清洁单元40可沿垂直于所述工作方向及横向方向的上下方向相对于所述机壳10自动升降,从而,当所述自动清洁设备100在工作中移动时,若工作环境发生变化,如地砖变成了地板、地毯等,或遇到障碍物时,能够通过相应的感测单元感测到环境变化,继而触动相应的驱动单元,使得所述第二清洁单元40可上下运动,以调整其与工作地面的位置关系,进而适应新的工作环境或转向进行避障。
30.所述自动清洁设备100进一步包括设置在所述机壳10上的后万向轮80,所述后万向轮80可与所述行走轮20一起工作,以配合所述第二清洁单元40工作。本实施例中,所述第一清洁单元30先将工作地面上的需要清除的垃圾进行了初步的清除,之后所述第二清洁单元40才进行洗地操作,避免了垃圾过多时难以进行洗地的情况,提升了所述自动清洁设备100的清洁干净度及工作效率。
31.所述自动清洁设备100进一步包括安装在所述主体11后侧的水箱60,所述水箱60包括清水箱61及设置在所述洗地滚刷40后方的污水收集装置62,所述清水箱61设置在所述污水收集装置62的上方。所述清水箱61内可以装有清水,以便在所述洗地滚刷40进行洗地工作时,可以给洗地滚刷40供水,从而增强洗地滚刷40的清洁能力。
32.此外,将清水箱61设置在污水收集装置62的上方,从而可以利用重力作用将清水引导到洗地滚刷40上。所述污水收集装置62设置在所述清水箱61的下方,从而更加靠近所述洗地滚刷40,进而便于收集所述洗地滚刷40在洗地工作时产生的污水,使得洗地滚刷40在洗地工作后,地面可以保持较高的干燥度。
33.所述水箱60进一步设有与所述清水箱61连通的清水注入口610及与所述污水收集装置62连通的污水抽水口620,从而所述自动清洁设备100可以与相应的基站进行自动连接,所述基站可通过所述清水注入口610自动注入清水到所述清水箱61内,与此同时,所述基站也可通过所述污水抽水口620自动将所述污水收集装置62内收集的污水进行抽离,使得所述自动清洁设备100可以长时间、重复地进行工作。
34.综上所述,本实用新型的自动清洁设备100通过在其尘盒50的两侧分别设置清洁单元30,40,从而可以先扫后拖,不仅增强了所述自动清洁设备100的清洁能力,而且提升了所述自动清洁设备100的工作效率。
35.以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。