1.本实用新型涉及一种基站及自动清洁组件,尤其涉及基站与自动清洁设备相互配合进行充电的结构。
背景技术:
2.现有的清洁机器人大多都是可充电的,一部分是通过内置的充电结构来进行充电,这样的内置式充电结构无法自动进行充电,需要人工辅助进行,存在使用不方便、不够自动化的缺点;也有一部分是通过外置的充电结构来进行充电,且具体是在清洁机器人的后部中间位置处设置充电金属片,同时在充电座内设置对应的充电插头,从而利用充电金属片与充电插头的电性对接来为清洁机器人充电。
3.但是,对于外置式的充电结构而言,因充电金属片设置在清洁机器人的后部中间位置处且体积较小,所以充电座上的充电插头也需要对应设置在充电座的中间位置处,对接时需要控制清洁机器人与充电座的对接精准性,否则很容易因清洁机器人位置不正而导致与充电座对接失败。
技术实现要素:
4.本实用新型的目的在于提供一种基站,其可以让回到基站的自动清洁设备比较容易的进行充电,且充电稳定性好。
5.为实现上述目的,本实用新型提供了一种基站,配置为供自动清洁设备自动对接进行充电,所述基站包括主体部及设置于主体部底端的收容部,所述收容部内形成有供收容所述自动清洁设备的收容区域及突伸到所述收容区域内的电极,所述收容部包括在竖直方向上相对设置的第一连接壁和第二连接壁、在水平方向上将所述第一连接壁和第二连接壁相连的第三连接壁以及在竖直方向上将所述第一连接壁和第二连接壁相连的第四连接壁,所述收容区域由所述第一连接壁、第二连接壁、第三连接壁及第四连接壁共同围设形成,所述电极设置有两个且间隔设置在所述第四连接壁的水平方向上的两端,以与所述自动清洁设备电性连接。
6.作为本实用新型的进一步改进,所述电极包括用于与所述自动清洁设备电性连接的连接部及弹性抵靠在所述连接部上的弹性件,所述弹性件用于缓解所述连接部与所述自动清洁设备电性连接时所述连接部所承受的力。
7.作为本实用新型的进一步改进,所述电极还包括与所述第四连接壁固定连接的固定件,所述固定件上开设有通孔,所述连接部的一端穿过所述通孔,所述弹性件的一端与所述连接部相抵接、另一端与所述固定件相抵接,以限制所述连接部在所述通孔内的移动位移。
8.作为本实用新型的进一步改进,所述连接部包括用于与自动清洁设备对接的对接部及与对接部相连的滑动部,所述滑动部穿过所述通孔,所述弹性件套设在所述滑动部上。
9.作为本实用新型的进一步改进,所述收容部内设有导向结构,所述导向结构用以
引导所述自动清洁设备进入所述收容区域并与所述电极建立电性连接。
10.作为本实用新型的进一步改进,所述导向结构包括可在所述基站与所述自动清洁设备之间活动的活动件,所述活动件包括滑轮轴、安装在所述滑轮轴上的滑轮及用于将所述滑轮轴和滑轮固定在所述收容部上的滑轮盖,所述滑轮用于与所述自动清洁设备滑动接触,以引导所述自动清洁设备进入所述收容区域。
11.作为本实用新型的进一步改进,所述活动件包括设置在所述第一连接壁上的第一活动件和设置在所述第二连接壁上的第二活动件,且所述第一活动件与所述第二活动件在竖直方向上相互对称设置。
12.作为本实用新型的进一步改进,所述第一活动件设置有两个,且该两个第一活动件在所述第一连接壁上间隔排列,所述第二活动件也设置有两个,且该两个第二活动件在所述第二连接壁上也间隔排列。
13.作为本实用新型的进一步改进,所述第四连接壁上还设有给所述自动清洁设备注水的注水接口及从所述自动清洁设备中抽水的抽水接口,所述注水接口和所述抽水接口在竖直方向上上下排布并在水平方向上位于两个电极之间。
14.本实用新型的目的在于提供一种自动清洁组件,其能够保证基站与自动清洁设备之间比较容易的进行充电,且充电稳定性好。
15.为实现上述目的,本实用新型提供了一种自动清洁组件,包括基站及可自动地沿工作方向运动并可自动回到基站进行充电的自动清洁设备,其中,所述基站为前述的基站,所述自动清洁设备的后端两侧设有导电接触片,所述导电接触片与所述电极相对设置且相互电性连接。
16.本实用新型的有益效果是:本实用新型的基站通过在其第四连接壁上设置突伸到收容区域内的一对间隔设置的电极,且将该一对电极分设在第四连接壁的水平方向上的两端,从而在自动清洁设备进入收容区域后能够很容易的与电极进行电性连接,为自动清洁设备自动充电,可靠性较好。
附图说明
17.图1是符合本实用新型优选实施例的自动清洁组件的立体图。
18.图2是图1中自动清洁设备与基站分开时的分解图。
19.图3是图2中所示的自动清洁设备的立体图。
20.图4是图3中所示的自动清洁设备的另一视角的立体图。
21.图5是图3中所示的自动清洁设备的分解图。
22.图6是图3中所示的自动清洁设备移除部分零件后的立体图。
23.图7是图6的另一视角示意图。
24.图8是图5中所示的自动清洁设备的顶壳的立体图。
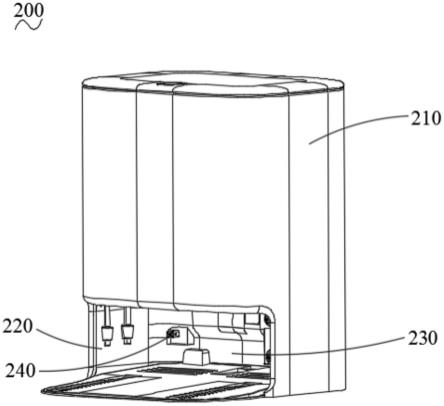
25.图9是图2中所示的基站的立体图。
26.图10是图9中所示的基站的分解图。
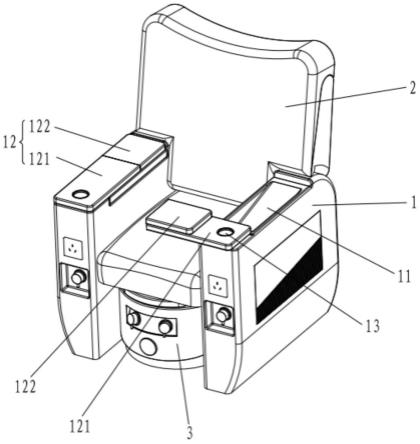
27.图11是图9中所示的基站的收容部的立体图。
28.图12是图11中所示的收容部的另一视角的立体图。
29.图13是图11中所示的收容部的分解图。
30.图14是图13的另一视角的分解图。
31.图15是图13中其中一个电极的立体图。
具体实施方式
32.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
33.请参阅图1与图2所示,本实用新型揭示了一种自动清洁组件300,其包括基站200及可自动地沿工作方向运动进行清洁地面并可自动回到基站200进行自动充电、加水及抽取污水的自动清洁设备100。
34.请参阅图3至图7所示,所述自动清洁设备100包括机壳10、安装在所述机壳10上以驱动所述自动清洁设备100行走的行走轮20、安装在所述机壳10上用以清洁地面的第一清洁单元30、安装在所述机壳10上用以清洁地面的第二清洁单元40、安装在所述机壳10上的尘盒50以及安装在所述机壳10内的可充电电池110。所述机壳10的后端两侧设有导电接触片130,所述机壳10具有相对设置的两个侧壁101以及连接该两个侧壁101的前壁(未标号)和后壁102,所述导电接触片130至少覆盖所述侧壁101与所述后壁102的连接处,以给所述可充电电池110充电。
35.本技术的自动清洁设备100是一种可以独立打扫卫生的机器人,在本实施例中,其是一种扫地及拖地一体的机器人,当然,在其它实施例中,也可以是其它合适的自动进行清洁工作的机器人或设备,在此不做限制。
36.本实用新型的自动清洁设备100将尘盒50设置成沿工作方向位于所述第一清洁单元30与所述第二清洁单元40之间,从而可以先扫后拖,增强了自动清洁设备100的清洁能力,提升了所述自动清洁设备100的工作效率。当然,在其他实施例中,所述自动清洁设备100也可仅设有第一清洁单元30或第二清洁单元40,此时的机器人则为扫地机器人或者拖地机器人,仅能用于扫地或者拖地。
37.所述机壳10包括设置在内部的主体11、安装在所述主体11上部的顶壳12、安装在所述主体11下部的底壳13、及安装在所述主体11前部的前壳14。所述尘盒50可沿上下方向安装到所述机壳10或从所述机壳10上取下。在本实施例中,所述前壳14可动地安装在所述主体11上,具体地,所述前壳14在上下方向上可相对所述主体11移动,如颠簸时,由于重力的影响使得前壳14可上下运动。
38.如图8所示,所述顶壳12包括基部120及自所述基部120的两侧向后延伸的延伸部121,该两个延伸部121之间形成有收容空间122。所述侧壁101和所述后壁102均至少部分形成在所述延伸部121上,所述导电接触片130设置在所述延伸部121上。具体地,所述导电接触片130从所述延伸部121的侧面延伸到后面,且所述导电接触片130延伸到所述延伸部121的后面的宽度与所述延伸部121在该位置的宽度相当,使得所述导电接触片130的面积足够大。也就是说,在横向方向上,导电接触片130的长度与延伸部121的长度相同或相近。需要说明的是:因所述导电接触片130的面积足够大,所以本技术中对于对接精度要求较低,进而对接失败的机率较低,增加了产品的可靠性及用户的使用体验。
39.如图6与图7所示,所述行走轮20设置有一对,且该对行走轮20沿垂直于所述工作方向的横向方向间隔设置。在所述自动清洁设备100的工作方向上,所述行走轮20设置于第
一清洁单元30与第二清洁单元40之间。本实施例中,每个行走轮均具有独立的驱动电机,从而可以驱动所述自动清洁设备100沿工作方向运动,以清洁地面;当然,在遇到障碍物时,行走轮20也能够自动的进行转弯或后退等。需要说明的是:行走轮20的行走、转弯、后退等均可通过现有的控制方案进行控制,此处不再举例说明,也不做任何限制。
40.所述尘盒50设置在该对行走轮20的横向方向之间,且可沿上下方向安装到所述机壳10上或从所述机壳10上取下。也就是说,在横向方向上,两个行走轮20分别设置在机壳10的底部两侧,而尘盒50则设置在该两个行走轮20之间,以节约机壳10的内部空间,实现空间利用率最大化。当然,在其他实施例中,尘盒50也可以设置在机壳10的其他位置,只要能够对灰尘及垃圾进行收集即可,此处不作限制。
41.所述第一清洁单元30为扫地滚刷,且该扫地滚刷30在所述工作方向上设置在所述尘盒50的前方。所述扫地滚刷30可沿垂直于所述工作方向及横向方向的上下方向相对于所述机壳10自动升降,从而,当所述自动清洁设备100在工作中移动时,若工作环境发生变化,如地砖变成了地板、地毯等,或遇到障碍物时,能够通过相应的感测单元感测到环境变化,继而触动相应的驱动单元,使得所述扫地滚刷30可上下运动,以调整其与工作地面的位置关系,进而适应新的工作环境或转向进行避障。所述扫地滚刷30的后端与所述尘盒50相连,从而在所述扫地滚刷30工作时,可将扫起的灰尘及垃圾储存在所述尘盒50里面。
42.如图4所示,所述自动清洁设备100进一步包括设置在所述机壳10上的前万向轮70,所述前万向轮70可与所述行走轮20一起工作,以配合所述扫地滚刷30工作。所述扫地滚刷30的后端与所述尘盒50相连,从而在所述第一清洁单元30工作时,可将扫起的灰尘及垃圾储存在所述尘盒50里面。
43.所述第二清洁单元40为用于洗地的洗地滚刷,且该洗地滚刷40在所述工作方向上设置在所述尘盒50的后方。所述洗地滚刷40可沿垂直于所述工作方向及横向方向的上下方向相对于所述机壳10自动升降,从而,当所述自动清洁设备100在工作中移动时,若工作环境发生变化,如地砖变成了地板、地毯等,或遇到障碍物时,能够通过相应的感测单元感测到环境变化,继而触动相应的驱动单元,使得所述洗地滚刷40可上下运动,以调整其与工作地面的位置关系,进而适应新的工作环境或转向进行避障。
44.所述自动清洁设备100进一步包括设置在所述机壳10上的后万向轮80,所述后万向轮80可与所述行走轮20一起工作,以配合所述第二清洁单元40工作。本实用新型中,所述扫地滚刷30先将工作地面上的需要清除的垃圾进行了初步的清除,之后所述洗地滚刷40才进行洗地操作,避免了垃圾过多时难以进行洗地的情况,提升了所述自动清洁设备100的清洁干净度及工作效率。
45.所述自动清洁设备100进一步包括安装在所述主体11后侧的水箱60。所述水箱60收容在所述收容空间122内,所述水箱60的后侧靠近所述延伸部121的区域向内凹陷形成凹陷部601,从而使得所述导电接触片130暴露在所述延伸部121后侧的区域突出于所述水箱60的后表面,以防止水箱60干扰所述导电接触片130与基站200进行电性连接。
46.如图4与图5所示,所述水箱60包括清水箱61及在工作方向上设置在所述洗地滚刷40后方的污水收集装置62,在垂直于工作方向的上下方向上,所述清水箱61设置在所述污水收集装置62的上方。所述清水箱61内可以装有清水,以便在所述洗地滚刷40进行洗地工作时,可以给洗地滚刷40供水,从而增强了所述洗地滚刷40的清洁能力。此外,将所述清水
箱61设置在所述污水收集装置62的上方,从而可以利用重力作用将清水引导到所述洗地滚刷40。所述污水收集装置62设置在所述清水箱61的下方,从而更加靠近所述洗地滚刷40,进而便于收集所述洗地滚刷40在洗地工作时产生的污水,使得洗地滚刷40在洗地工作后,地面可以保持较高的干燥度。
47.所述水箱60进一步设有与所述清水箱61连通的清水注入口610,及与所述污水收集装置62连通的污水抽水口620,从而所述自动清洁设备100可以与基站200进行自动连接,以便基站200通过所述清水注入口610自动注入清水到所述清水箱61内,同时基站200也可通过所述污水抽水口620自动将所述污水收集装置62内收集的污水进行抽离,使得所述自动清洁设备100可以长时间、重复地进行工作。
48.请参阅图9及图15所示,所述基站200包括主体部210及设置于主体部210的底端用以收容所述自动清洁设备100的收容部220。所述收容部220内形成有供收容所述自动清洁设备100的收容区域230,及突伸到所述收容区域230内的一对间隔设置的电极240,该对电极240用于给所述自动清洁设备100充电。具体来讲,当所述自动清洁设备100回到所述收容区域230内时,所述电极240与相应的导电接触片130接触,从而在自动清洁设备100与基站200之间建立电性连接,给所述自动清洁设备100充电。需要说明的是:因所述导电接触片130的面积足够大,所以本技术中对于对接精度要求较低,进而对接失败的机率较低,增加了产品的可靠性及用户的使用体验。
49.具体地,在本实施例中,所述导电接触片130为向外突出的弧形结构,从而其很容易与所述基站200内的电极240电性接触而建立充电连接,不需要精确定位即可实现充电。进一步地,所述电极240包括可动的与所述自动清洁设备100的导电接触片130电性连接的连接部241及弹性抵靠在所述连接部241上的弹性件242,所述弹性件242用于缓解所述连接部241与所述导电接触片130电性连接时所述连接部241所承受的力。也就是说,当自动清洁设备100进入到收容区域230内后,可在进入时产生的运动惯性下使得导电接触片130与电极240电性接触、弹性件242被压缩,而在充电完成后,自动清洁设备100从收容区域230离开后,弹性件242能够将连接部241复位。这样的设计,能够进一步提升自动清洁设备100与基站200之间的电性连接可靠性,且不会因惯性力过大而导致连接部241断裂,延长了电极240的使用寿命。
50.结合图13与图14所示,所述收容部220包括在竖直方向上相对设置的第一连接壁221和第二连接壁222、在水平方向上将所述第一连接壁221和第二连接壁222相连的第三连接壁223以及在竖直方向上将所述第一连接壁221和第二连接壁222相连的第四连接壁224,所述收容区域230由所述第一连接壁221、第二连接壁222、第三连接壁223及第四连接壁224共同围设形成,一对电极240间隔设置在第四连接壁224的水平方向上的两端,从而可与导电接触片130位置对应。
51.所述电极240还包括与第四连接壁224固定连接的固定件243,所述固定件243上开设有通孔(未标号),所述连接部241的一端穿过通孔并可沿所述通孔滑动。所述弹性件242的一端与连接部241相抵接、另一端与固定件243相抵接,以限制所述连接部241在所述通孔内的滑动位移。较佳地,所述连接部241包括用于与导电接触片130对接的对接部2411及与对接部2411相连的滑动部2412,所述滑动部2412呈轴状设置并穿过所述通孔,所述弹性件242套设在所述滑动部2412上。如此设置,可利用滑动部2412在通孔内的滑动来压缩/释放
弹性件242,使得导电接触片130与对接部2411之间的电性连接效果最佳。
52.如图9至图14所示,所述收容部220的第四连接壁224上还设有与所述清水注入口610连接以给所述自动清洁设备100注水的注水接口270及用以与所述污水抽水口620连接以从所述自动清洁设备100内抽取污水的抽水接口280。所述注水接口270与所述抽水接口280在水平方向上位于两个电极240之间,与此同时,在所述基站200的高度方向(即竖直方向)上,所述注水接口270位于所述抽水接口280的上方。
53.进一步地,所述收容部220内还设有导向结构250,该导向结构250用以引导所述自动清洁设备100进入所述收容区域230并与所述电极240建立电性连接。所述导向结构250包括可在所述基站200与所述自动清洁设备100之间活动的活动件260,所述活动件260设置在所述收容部220的两侧,以在引导自动清洁设备100自动回到收容区域230的同时起到防卡死的效果,从而提升了自动清洁设备100自动回到收容区域230的稳定性。
54.所述活动件260包括设置在第一连接壁221上的第一活动件261和设置在第二连接壁222上的第二活动件262,且所述第一活动件261与所述第二活动件262在竖直方向上相互对称设置。在本实施例中,所述第一活动件261设置有两个,且该两个第一活动件261在第一连接壁221上沿前后方向间隔排列;所述第二活动件262也设置有两个,且该两个第二活动件262在第二连接壁222上也沿前后方向间隔排列。具体地,每个活动件260均包括滑轮轴263、安装在滑轮轴263上的滑轮264及用于将所述滑轮轴263和滑轮264固定在收容部220上的滑轮盖265。所述滑轮264大体呈锥体,且为上大下小的锥体,从而在自动清洁设备100进入收容区域230时,所述滑轮264可以与所述自动清洁设备100滑动接触并绕滑轮轴263转动,继而起到导引的作用,增加了产品使用的可靠性。
55.综上所述,本实用新型的基站200通过在其第四连接壁224上设置突伸到收容区域230内的一对间隔设置的电极240,且将该一对电极240分设在第四连接壁224的水平方向上的两端,从而在自动清洁设备100进入收容区域230后能够很容易的与电极240进行电性连接,为自动清洁设备100自动充电,可靠性较好。
56.以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。