1.本发明属于养殖舱起捕技术领域,具体涉及具有鱼类智能起捕分类一体化装置的养殖舱及捕收方法。
背景技术:
2.随着海洋捕捞产量的萎靡、近海生态系统的恶化,人们对健康绿色海产品的需求不断增长,促使了海洋养殖业逐渐迈入深蓝海域,利用深远海优质水资源大批量养殖良好经济效益鱼类的深远海养殖,是拓展养殖区域、提高海产品产量的重要方式。养殖工船作为一种新型深远海养殖装备,相较于传统养殖平台具有可游弋躲避台风、赤潮等灾害的优势。目前,养殖工船作为一种高度集约化的养殖模式,具有养殖密度高、成鱼产品数量大的特点,采用传统网箱拉网起捕的方式不但劳动强度过大,易造成鱼体损伤,而且起捕时间过长,效率低下。
3.cn113040087a公开了一种养殖工船养殖舱起捕系统,包括:养殖舱;与养殖舱底部连通的出鱼管道;下部与吸鱼管路连通的至少一提升筒;位于提升筒内部并可沿提升筒轴向移动的托盘提升装置;与所述提升筒上部连通的水环真空泵;与提升筒侧壁连通,且连通部位低于所述水环真空泵与提升筒的连通部位的受鱼池。上述专利可实现养殖工船养殖舱高效自动化起捕,并且可实现大吸程起捕,劳动强度低。但是其需要铺设管道,先进行海水泄放,最后鱼水混合物进入收鱼池,工序繁琐结构,复杂,且由于养殖舱内会存在大小不同的养殖鱼类,售卖时,需要按鱼类的大小不同进行售卖,上述专利并不能实现起捕后,按鱼类的大小进行泄鱼,需要人工进行分鱼,增加了工人的劳动量,具有一定的使用局限性,
4.因此,寻找一种新型高效的起捕作业方式,实现起捕的机械化、自动化,减少人为因素对生产过程影响的同时,实现起捕分类的一体化,是发展养殖工船舱养模式亟待解决的难题。
技术实现要素:
5.针对上述现有技术存在的不足,提高了具有鱼类智能起捕分类一体化装置的养殖舱及捕收方法,实现起捕的机械化、自动化,减少人为因素对生产过程影响的同时,实现起捕分类的一体化,降低了工人的劳动量,提高了作业效率。
6.具有鱼类智能起捕分类一体化装置的养殖舱,包括养殖舱本体,以及设于养殖舱本体上的立管,在立管内设有一转动机构,在转动机构上设有由第一固定管及多个直径逐级缩小的且相互连通的横管组成的第一固定腔,在第一固定腔内设有第一驱动气缸,在第一驱动气缸上设有第一伸缩管,在第一伸缩管一端设有第二驱动气缸,在第二驱动气缸上设有由第二固定管及多个直径逐级缩小的且相互连通的纵管组成的第二固定腔,在第二固定腔内设有第三驱动气缸,在第三驱动气缸上设有第二伸缩管,第二伸缩管底部设有由四块对应设置的板体及设于四块板体底部的封闭板组成的捕鱼箱,所述捕鱼箱顶部设有用于将捕鱼箱与第二伸缩管连接的横板,在捕鱼箱内设有用于将按鱼大小分类泄鱼的分鱼机
构,还包括用于监测养殖舱内鱼类位置的第一视觉监测模块,以及用于当第一视觉监测模块监测鱼类位置后,检测鱼类位置舱水深度的第一检测模块,用于根据第一视觉监测模块及第一检测模块检测数据计算第一驱动气缸、第二驱动气缸、第三驱动气缸驱动距离,以使第二伸缩管将捕鱼箱驱动至预定位置后,水平面低于第二伸缩管的计算模块,还包括中央控制模块,以及与中央控制模块信号连接的控制器,在捕鱼箱底部设有用于悬挂收鱼网的固定钩,以及活动钩,所述活动钩包括第一定位板,及第二定位板,在第二定位板上设有容纳腔,在容纳腔内设有第四驱动气缸,在第四驱动气缸上设有一伸缩杆,在第一定位板上设有一与伸缩杆对应的孔位,所述第一视觉监测模块监测养殖舱内鱼类位置后,发送信号至中央控制模块,中央控制模块发送信号至第一检测模块,第一检测模块根据第一视觉监测模块监测鱼类位置,检测鱼类位置舱水深度,并发送信号至中央控制模块,中央控制模块发送信号至计算模块,计算模块计算第一驱动气缸、第二驱动气缸、第三驱动气缸驱动距离,以使第二伸缩管将捕鱼箱驱动至预定位置,水平面低于第二伸缩管后,发送信号至中央控制模块,中央控制模块接收信号后,发送信号至控制器,控制器发送启动信号至第一驱动气缸、第二驱动气缸以及第三驱动气缸,当捕鱼箱完成捕鱼后,控制器发送启动信号至分鱼机构,当分鱼机构完成后分鱼后,控制器发送复位信号至第一驱动气缸、第二驱动气缸以及第三驱动气缸,并发送启动信号至转动机构将捕鱼箱转动至收鱼处,当转动机构将捕鱼箱转动至收鱼处时,控制器发送开启信号至第四驱动气缸将伸缩杆与孔位脱离,使收鱼网一端从伸缩杆上滑落,使鱼类落至相应的收鱼处。
7.上述的具有鱼类智能起捕分类一体化装置的养殖舱,所述分鱼机构包括用于将鱼类按小型鱼、中型鱼、大型鱼进行规格设定的设定模块,用于实时采集捕鱼箱内鱼类图像的第二视觉监测模块,以及用于根据设定模块及第二视觉监测模块信息,实时分析相应鱼类数量的图像分析模块,在封闭板内开设有内腔,在内腔内间隔设有用于将封闭板分成用于进小型鱼的第一进鱼区、用于进中型鱼的第二进鱼区及用于进大型鱼的第三进鱼区的第一隔板及第二隔板,在第一进鱼区、第二进鱼区及第三进鱼区上分别设有多个贯通封闭板的进鱼孔,所述第一进鱼区的进鱼孔小于第二进鱼区的进鱼孔,所述第二进鱼区的进鱼孔小于第三进鱼区的进鱼孔,在第一隔板上设有多个用于启闭第二进鱼区的进鱼孔的第一启闭气缸,在第二隔板上设有多个用于启闭第三进鱼区的进鱼孔的第二启闭气缸,在第一、二启闭气缸上分别设有启闭板,所述收鱼网为三个,分别设于第一、二、三进鱼区下方,所述设定模块发送信息至中央控制模块,第二视觉监测模块实时采集捕鱼箱内鱼类图像后,发送图像至中央控制模块,所述中央控制模块接收信息后,发送信息至图像分析模块,所述图像分析模块根据设定模块及第二视觉监测模块信息,实时分析相应鱼类数量后,发送信号至中央控制模块,所述中央控制模块发送信号至控制器,控制器发送相应信号至第一启闭气缸,第二启闭气缸,依次启闭第二进鱼区的进鱼孔,第三进鱼区的进鱼孔。
8.上述的具有鱼类智能起捕分类一体化装置的养殖舱,在第一进鱼区的进鱼孔两侧设有顶部为弧形的第一柱体,在第二进鱼区的进鱼孔两侧设有顶部为弧形的第二柱体,在第三进鱼区的进鱼孔两侧设有顶部为弧形的第三柱体。
9.上述的具有鱼类智能起捕分类一体化装置的养殖舱,所述转动机构包括两对应设于立管顶部及底部的轴承,在两轴承之间设有一顶部穿过立管顶部的转轴,在转轴上设有一从动齿轮,在立管内壁上设有一电机固定座,在电机固定座上设有一驱动电机,在驱动电
机上设有一与从动齿轮啮合的主动齿轮,所述控制器发送信号至驱动电机。
10.上述的具有鱼类智能起捕分类一体化装置的养殖舱,在各横管一端分别设有与相邻横管内壁滑动连接的第一滑动板,在第一伸缩管上设有第二滑动板,在各横管上分别设有第一挡板,所述伸缩气缸与第二滑动板连接。
11.上述的具有鱼类智能起捕分类一体化装置的养殖舱,在各纵管一端分别设有与相邻纵管内壁滑动连接的第三滑动板,在第二伸缩管上设有第四滑动板,在各纵管上分别设有第二挡板,所述伸缩气缸与第四滑动板连接。
12.上述的具有鱼类智能起捕分类一体化装置的养殖舱的捕收方法,包括如下步骤:
13.(1)、监测养殖舱内鱼类位置;
14.(2)、根据第一视觉监测模块监测鱼类位置,检测鱼类位置舱水深度;
15.(3)、计算将捕鱼箱驱动至预定位置后,水平面低于第二伸缩管的第二伸缩管的伸缩长度;
16.(4)、驱动捕鱼箱进行捕鱼;
17.(5)、分鱼;
18.(6)、当分鱼结束后,将捕鱼箱转动至收鱼处;
19.(7)、泄鱼。
20.上述的具有鱼类智能起捕分类一体化装置的养殖舱的捕收方法,
21.所述步骤(5)中的分鱼步骤为:
22.(1)、将鱼类按小型鱼、中型鱼、大型鱼进行规格设定;
23.(2)、当捕鱼箱完成捕鱼后,将捕鱼箱上升离开水面,收鱼网位于水面以下;
24.(3)、实时采集捕鱼箱内鱼类图像;
25.(4)、根据上述步骤(1)、(3)信息,实时分析相应鱼类数量;
26.(5)、按小型鱼、中型鱼、大型鱼顺序收入收鱼网内。
27.本发明具有鱼类智能起捕分类一体化装置的养殖舱及捕收方法的有益效果是,实现起捕的机械化、自动化,减少人为因素对生产过程影响。
28.通过设置由第一固定管及多个直径逐级缩小的且相互连通的横管组成的第一固定腔,以及在第二驱动气缸上设有由第二固定管及多个直径逐级缩小的且相互连通的纵管组成的第二固定腔,降低了装置重量,并且通过计算模块的计算,当第二伸缩管将捕鱼箱驱动至预定位置,使水平面低于第二伸缩管,减小了舱水对装置运行时的阻力,以及捕鱼时对鱼的影响,降低鱼的应激反应。
29.通过设置分鱼机构,实现起捕分类的一体化,降低了工人的劳动量,提高了作业效率。
附图说明
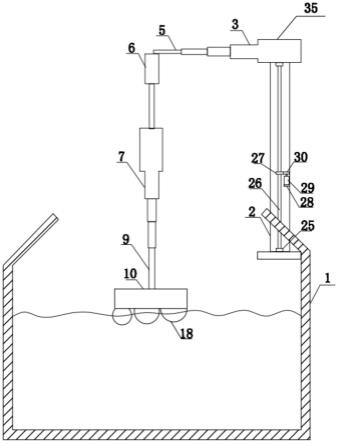
30.图1为本发明的结构示意图;
31.图2为第一固定腔的内部结构示意图;
32.图3为第二固定腔的内部结构示意图;
33.图4为捕鱼箱的俯视图;
34.图5为内腔内部的结构示意图;
35.图6为固定钩与活动钩的结构示意图;
36.图7为本发明的电路结构框图;
37.图8为分鱼机构的电路结构框图。
具体实施方式
38.下面结合具体实施例对本发明做详细说明。
39.实施例1
40.如图所示,具有鱼类智能起捕分类一体化装置的养殖舱,包括养殖舱本体1,以及设于养殖舱本体上的立管2,在立管2内设有一转动机构,在转动机构上设有由第一固定管35及多个直径逐级缩小的且相互连通的横管3组成的第一固定腔,在第一固定腔内设有第一驱动气缸4,在第一驱动气缸4上设有第一伸缩管5,在第一伸缩管5一端设有第二驱动气缸6,在第二驱动气缸6上设有由第二固定管36及多个直径逐级缩小的且相互连通的纵管7组成的第二固定腔,在第二固定腔内设有第三驱动气缸8,在第三驱动气缸8上设有第二伸缩管9,第二伸缩管9底部设有由四块对应设置的板体及设于四块板体底部的封闭板组成的捕鱼箱10,所述捕鱼箱10顶部设有用于将捕鱼箱与第二伸缩管9连接的横板11,在捕鱼箱10内设有用于将按鱼大小分类泄鱼的分鱼机构,还包括用于监测养殖舱内鱼类位置的第一视觉监测模块,以及用于当第一视觉监测模块监测鱼类位置后,检测鱼类位置舱水深度的第一检测模块,第一检测模块为距离传感器,用于根据第一视觉监测模块及第一检测模块检测数据计算第一驱动气缸、第二驱动气缸、第三驱动气缸驱动距离,以使第二伸缩管将捕鱼箱驱动至预定位置后,水平面低于第二伸缩管的计算模块,还包括中央控制模块,以及与中央控制模块信号连接的控制器,所述控制器为plc,在捕鱼箱10底部设有用于悬挂收鱼网18的固定钩35,以及活动钩,所述活动钩包括第一定位板42,及第二定位板37,在第二定位板37上设有容纳腔,在容纳腔内设有第四驱动气缸38,在第四驱动气缸38上设有一伸缩杆39,在第一定位板上设有一与伸缩杆对应的孔位,所述第一视觉监测模块监测养殖舱内鱼类位置后,发送信号至中央控制模块,中央控制模块发送信号至第一检测模块,第一检测模块根据第一视觉监测模块监测鱼类位置,检测鱼类位置舱水深度,并发送信号至中央控制模块,中央控制模块发送信号至计算模块,计算模块计算第一驱动气缸、第二驱动气缸、第三驱动气缸驱动距离,以使第二伸缩管将捕鱼箱驱动至预定位置,水平面低于第二伸缩管后,发送信号至中央控制模块,中央控制模块接收信号后,发送信号至控制器,控制器发送启动信号至第一驱动气缸、第二驱动气缸以及第三驱动气缸,当捕鱼箱完成捕鱼后,控制器发送启动信号至分鱼机构,当分鱼机构完成后分鱼后,控制器发送复位信号至第一驱动气缸、第二驱动气缸以及第三驱动气缸,并发送启动信号至转动机构将捕鱼箱转动至收鱼处,当转动机构将捕鱼箱转动至收鱼处时,控制器发送开启信号至第四驱动气缸将伸缩杆与孔位脱离,使收鱼网一端从伸缩杆上滑落,使鱼类落至相应的收鱼处。
41.所述分鱼机构包括用于将鱼类按小型鱼、中型鱼、大型鱼进行规格设定的设定模块,例如,10cm-13cm为小型鱼,14cm-16cm为中型鱼17cm-20cm为大型鱼,用于实时采集捕鱼箱内鱼类图像的第二视觉监测模块,以及用于根据设定模块及第二视觉监测模块信息,实时分析相应鱼类数量的图像分析模块,在封闭板内开设有内腔,在内腔内间隔设有用于将封闭板分成用于进小型鱼的第一进鱼区12、用于进中型鱼的第二进鱼区13及用于进大型鱼
的第三进鱼区14的第一隔板15及第二隔板16,在第一进鱼区、第二进鱼区及第三进鱼区上分别设有多个贯通封闭板的进鱼孔17,所述第一进鱼区的进鱼孔小于第二进鱼区的进鱼孔,所述第二进鱼区的进鱼孔小于第三进鱼区的进鱼孔,在第一隔板上设有多个用于启闭第二进鱼区的进鱼孔的第一启闭气缸19,在第二隔板16上设有多个用于启闭第三进鱼区14的进鱼孔的第二启闭气缸20,在第一、二启闭气缸上分别设有启闭板21,所述收鱼网18为三个,分别设于第一、二、三进鱼区下方,所述设定模块发送信息至中央控制模块,第二视觉监测模块实时采集捕鱼箱内鱼类图像后,发送图像至中央控制模块,所述中央控制模块接收信息后,发送信息至图像分析模块,所述图像分析模块根据设定模块及第二视觉监测模块信息,实时分析相应鱼类数量后,发送信号至中央控制模块,所述中央控制模块发送信号至控制器,控制器发送相应信号至第一启闭气缸,第二启闭气缸,依次启闭第二进鱼区的进鱼孔,第三进鱼区的进鱼孔。第一、二视觉监测模块为水下摄像机。
42.在第一进鱼区的进鱼孔两侧设有顶部为弧形的第一柱体22,在第二进鱼区的进鱼孔两侧设有顶部为弧形的第二柱体23,在第三进鱼区的进鱼孔两侧设有顶部为弧形的第三柱体24。
43.所述转动机构包括两对应设于立管2顶部及底部的轴承25,在两轴承25之间设有一顶部穿过立管2顶部的转轴26,在转轴26上设有一从动齿轮27,在立管2内壁上设有一电机固定座28,在电机固定座28上设有一驱动电机29,在驱动电机29上设有一与从动齿轮啮合的主动齿轮30,所述控制器发送信号至驱动电机29。
44.在各横管3一端分别设有与相邻横管3内壁滑动连接的第一滑动板31,在第一伸缩管5上设有第二滑动板40,在各横管上分别设有第一挡板32,所述伸缩气缸与第二滑动板连接。
45.在各纵管3一端分别设有与相邻纵管3内壁滑动连接的第三滑动板33,在第二伸缩管9上设有第四滑动板41,在各纵管3上分别设有第二挡板34,所述伸缩气缸与第四滑动板连接。
46.上述的具有鱼类智能起捕分类一体化装置的养殖舱的捕收方法,包括如下步骤:
47.(1)、监测养殖舱内鱼类位置;
48.(2)、根据第一视觉监测模块监测鱼类位置,检测鱼类位置舱水深度;
49.(3)、计算将捕鱼箱驱动至预定位置后,水平面低于第二伸缩管的第二伸缩管的伸缩长度;
50.(4)、驱动捕鱼箱进行捕鱼;
51.(5)、分鱼;
52.(6)、当分鱼结束后,将捕鱼箱转动至收鱼处;
53.(7)、按小型鱼、中型鱼、大型鱼自动泄鱼至相应的收鱼处。
54.所述步骤(5)中的分鱼步骤为:
55.(1)、将鱼类按小型鱼、中型鱼、大型鱼进行规格设定;
56.(2)、当捕鱼箱完成捕鱼后,将捕鱼箱上升离开水面,收鱼网位于水面以下;
57.(3)、实时采集捕鱼箱内鱼类图像;
58.(4)、根据上述步骤(1)、(3)信息,实时分析相应鱼类数量;
59.(5)、按小型鱼、中型鱼、大型鱼顺序收入收鱼网内。
60.当然,上述说明并非对本发明的限制,本发明也并不局限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。