1.本发明涉及医疗机器人康复器械领域,具体的说是一种气压驱动带腕部回转训练的外骨骼式上肢康复机器人。
背景技术:
2.随着社会老龄化进程的加快,由脑卒中、脑外伤等导致的运动功能障碍康复问题,已经在世界范围内引起了人们广泛关注。因为康复机器人能够协助或替代医疗师帮助患者进行康复训练,所以得到迅速发展并在临床康复中得到了广泛应用。
3.目前市场上有的上肢康复机器人大致可以分为两种,一种是末端牵引式康复机器人,它是将患者手臂放置到机器人末端处,机器人末端机构牵引患者手部运动,进而带动患者手臂模拟日常生活的运动,使患者上肢的肩关节,肘关节和腕关节以及运动功能神经得到一定程度上的物理刺激,辅助患者运动功能的恢复。这类机器人结构比较简单,但是由于结构的限制,不能完全实现具有个性化的康复训练路径,而且末端牵引式的机器人牵引力作用在患者手臂的末端,不能准确地把作用力施加到患者手臂的各个关节,康复训练效果可能不能达到期望的效果。另一种是外骨骼式康复机器人,机器人直接穿戴到患者的手臂上,患者手臂的每个关节处都有独立的驱动转置,根据康复需求制定个性化的治疗,提高康复训练的效果。但是现有的外骨骼式康复机器人的驱动大多是采用电机驱动,虽然电机具有精度高,控制策略简单等优点,但是电机本身刚性较大,驱动柔顺性差的特点,不利于患者的康复训练,而且在康复训练的过程中可能会对患者造成二次伤害。
技术实现要素:
4.为解决上述问题,本发明提供一种气压驱动带腕部回转训练的外骨骼式上肢康复机器人。该康复机器人的四关节均采用摆动气缸作为驱动单元,并附加有编码器实时检测摆动气缸的旋转角度,用于闭环反馈控制信号。该康复机器人的肩关节有两个自由度,实现大臂在平面上的外展、内收和矢状面上的弯曲、伸展运动,小臂有二个自由度,实现小臂在平面上的外展、内收和冠状面上的内旋、外旋运动,末端安装有一个手柄。本发明解决了现有康复机器人直接采用电机驱动的惯性大和驱动柔顺性差,甚至在运动过程中对患者造成二次伤害的为题,同时解决了现有末端牵引式康复机器人无法精确地将牵引力施加到患者各个关节已达到刺激神经的目的。
5.本发明通过以下技术方案来实现:一种气压驱动带腕部回转训练的外骨骼式上肢康复机器人,包括依次水平连接的末端机构、小臂、大臂,所述末端机构、小臂、大臂构成四自由度的康复机器人,所述康复机器人由支撑机构支撑;所述大臂有两个自由度,通过驱动机构ⅰ实现肩部在平面上的外展、内收和矢状面上的弯曲、伸展运动;所述小臂有两个自由度,通过驱动机构ⅱ实现小臂在平面上的外展、内收和冠状
面上的内旋、外旋运动。
6.进一步的,所述驱动机构ⅰ包括竖直设置的摆动气缸ⅰ和水平设置的摆动气缸ⅱ;所述摆动气缸ⅰ的输出轴连接有小齿轮ⅰ,所述小齿轮ⅰ与外齿转盘支承ⅰ啮合传动,所述外齿转盘支承的内径与其上方t型连接板的水平板连接,所述外齿转盘支承的外径通过底部的肩部钣金件与摆动气缸ⅱ连接;所述摆动气缸ⅱ的输出轴穿过肩部钣金件且连接有小齿轮ⅱ,所述小齿轮ⅱ通过底部设置的外齿转盘支承ⅱ与大臂连接,所述小齿轮ⅱ与外齿转盘支承ⅱ相啮合。
7.进一步的,所述大臂与小臂通过连接机构连接,且在大臂与小臂连接处的底部设置有带轮,所述带轮通过同步带ⅱ连接有同步带轮ⅱ;所述驱动机构ⅱ包括位于同步带轮ⅱ下方的摆动气缸ⅲ,所述同步带轮ⅱ与摆动气缸ⅲ的输出轴连接,所述摆动气缸ⅲ由支承架支撑,且支承架通过梯形连接板与连接机构远离带轮一端的底部连接。
8.进一步的,所述连接机构包括大臂固定架,所述大臂固定架设置在大臂靠近小臂的一端,所述大臂固定架的上板连接有大臂前端支承架,所述大臂固定架的下板连接有大臂前端支承架,所述小臂的一端分别通过大臂前端支承架、大臂前端支承架与大臂相连。
9.进一步的,在大臂上水平开有两条长槽孔,所述大臂固定架通过对应设置在两条长槽孔内的螺栓连接在大臂上,通过调节螺栓移动大臂固定架进而调整大臂的长度。
10.进一步的,所述驱动机构ⅱ还包括摆动气缸ⅳ,所述小臂远离大臂的一端设置有小臂固定架,所述小臂固定架通过梯形连接架连接有摆动气缸法兰板,所述摆动气缸ⅳ通过气缸法兰ⅱ与摆动气缸法兰板连接,所述摆动气缸ⅳ的输出轴连接有同步带轮ⅰ,所述同步带轮ⅰ通过同步带ⅰ连接有半圆弧导轨,所述半圆弧导轨连接有导轨基体半圆弧件,在半圆弧导轨上设置有导轨滑块,所述半圆弧导轨可以沿导轨滑块来回滑动。
11.进一步的,所述导轨滑块与摆动气缸法兰板的侧板固定连接,所述同步带ⅱ分别连接在半圆弧导轨的上下两端,且在半圆弧导轨两端设置有限位块,摆动气缸ⅳ旋转带动半圆弧导轨相对气缸法兰板摆动进行内外旋运动,实现小臂的的内旋和外旋训练。
12.进一步的,在摆动气缸法兰板与同步带轮ⅰ平行的侧板上设置有分别对应上下端同步带的两个惰轮,惰轮通过螺栓安装在摆动气缸法兰板上,通过调整螺栓移动带动两个惰轮的移动,进而调整同步带的张紧。
13.进一步的,所述导轨基体半圆弧件通过半圆弧连接块与末端机构相连接,所述末端机构包括三维力传感器、手柄、支撑板,所述支撑板的一端底部与半圆弧连接块相连接,所述三维力传感器通过u型钣金件设置在支撑板的底部,所述三维力传感器的顶部通过联轴器与位于支撑板上方的手柄相连接。
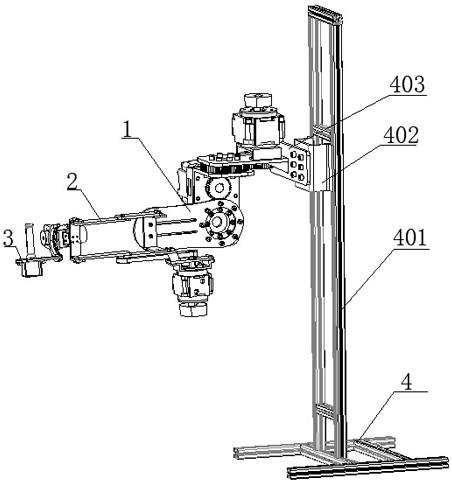
14.进一步的,所述支撑机构包括铝型材立柱,所述铝型材立柱竖直设置在底座上,所述铝型材立柱通过钣金连接件与驱动机构ⅰ上的t型连接板连接。
15.本发明的有益效果在于:(1)该机器人各个关节选择气缸作为驱动机构,并在各个气缸处配置增量式编码器,相比于电机和液压驱动,气缸驱动在柔顺性和安全性问题上具有更加明显的优势,特别是由于气体的可压缩性,在康复训练的过程中,可以避免对患者的手臂造成二次伤害,已获得更佳的康复训练效果;
(2)该机器人的肩部两个关节除了选择气缸作为驱动机构外,又增加了两对齿轮减速,两个摆动气缸分别与对应的小齿轮连接,采用、外齿转盘支承ⅱ与大臂连接,通过外齿啮合进行传动,增加齿轮减速的目的是提高肩部的两个摆动气缸在低速运行时的性能,能有效避免摆动气缸本身在低速运行出现的“爬行”现象,提高摆动气缸低速运行的稳定性能;(3)该机器人的大臂设计有调整装置,可以根据不同的患者的臂长进行调整,以适应不同患者的穿戴,可调性比较强,穿戴方便,舒适的特点;(4)该机器人在小臂处采用圆弧导轨滑块机构以实现小臂的内旋、外旋运动,增加小臂的活动范围,以便于提高患者小臂的康复训练效果,使上肢康复训练的针对性大大提高;(5)该机器人肘关节的驱动机构,采用同步带传递的方式,这样做的好处是使摆动气缸ⅲ的安装位置后移,在康复训练的过程中,能够减少肩部第二摆动气缸的转动惯量,提高相应摆动气缸的输出力特性。
附图说明
16.图1是本发明的整体结构示意图;图2是本发明的肩部运动结构示意图;图3是本发明的肘部运动结构示意图;图4是本发明的小臂旋转结构示意图;图5是本发明的末端结构示意图;附图标记:1、大臂,101、编码器ⅰ,102、摆动气缸ⅰ,103、支架,104、小齿轮ⅰ,105、外齿转盘支承ⅰ,106、肩部钣金件,107、气缸法兰ⅰ,108、摆动气缸ⅱ,109、小齿轮ⅱ,110、外齿转盘支承ⅱ,111、大臂固定架,112、编码器ⅱ,112a、大臂前端支承架,112b、大臂前端支承架,113、梯形连接板,114、连接板,115、支承架,116、摆动气缸ⅲ,117、编码器ⅲ,118、带轮,119、同步带ⅱ,120、同步带轮ⅱ,2、小臂,201、小臂固定架,202、摆动气缸法兰板,203、摆动气缸ⅳ,204、同步带轮ⅰ,205、导轨滑块,206、半圆弧导轨,207、导轨基体半圆弧件,208、编码器ⅳ,209、梯形连接架,210、气缸法兰ⅱ,211、同步带ⅰ,3、末端机构,301、三维力传感器,302、u型钣金件,303、手柄,304、联轴器,305、半圆弧连接块,4、支撑机构,401、铝型材立柱,402、钣金连接件,403、t型连接板。
具体实施方式
17.下面根据附图对本发明实施例中的技术方案进行清楚、完整地描述。
18.实施例1如图1所示,一种气压驱动带腕部回转训练的外骨骼式上肢康复机器人,包括依次水平连接的末端机构3、小臂2、大臂1,所述末端机构3、小臂2、大臂1构成四自由度的康复机器人;所述大臂1有两个自由度,通过驱动机构ⅰ实现肩部在平面上的外展、内收和矢状面上的弯曲、伸展运动;所述小臂2有两个自由度,通过驱动机构ⅱ实现小臂在平面上的外展、内收和冠状面上的内旋、外旋运动。
19.所述机器人由铝合金组成的支撑机构4支撑,所述支撑机构4包括铝型材立柱401,所述铝型材立柱401竖直设置在底座上,所述铝型材立柱401上设置有钣金连接件402,所述钣金连接件402通过螺栓与驱动机构ⅰ上的t型连接板403连接,所述t型连接板403的竖直板与水平板均为设有筋的连接件。
20.如图2所示,该机器人的肩部有两个自由度,能够带动患者的大臂在平面上的外展、内收和矢状面上的弯曲、伸展运动。所述驱动机构ⅰ包括竖直设置的摆动气缸ⅰ102和水平设置的摆动气缸ⅱ108,所述机器人的水平面的运动由摆动气缸ⅰ102驱动,在矢状面上的弯曲、伸展运动由摆动气缸ⅱ108驱动,所述摆动气缸ⅰ102和摆动气缸ⅱ108上分别对应安装有编码器ⅰ101和编码器ⅱ112,用于实时检测摆动气缸的输出角度;所述摆动气缸ⅰ102的输出轴连接有小齿轮ⅰ104,所述小齿轮ⅰ104与外齿转盘支承ⅰ105啮合传动,所述外齿转盘支承105的内径与其上方t型连接板403的水平板连接,在t型连接板的水平板上设置有用于固定摆动气缸ⅰ102的支架103,所述大臂通过t型连接板403的竖直板与支撑机构4相连接,所述外齿转盘支承105的外径通过底部的肩部钣金件106与摆动气缸ⅱ108连接;所述摆动气缸ⅱ108与气缸法兰ⅰ107连接,所述摆动气缸ⅱ108的输出轴穿过肩部钣金件106且连接有小齿轮ⅱ109;所述小齿轮ⅱ109通过底部设置的外齿转盘支承ⅱ110与大臂1连接;所述小齿轮ⅱ109与外齿转盘支承ⅱ110相啮合,摆动气缸ⅰ102带动小齿轮104转动,实现肩部在平面上的外展、内收运动,摆动气缸ⅱ108带动小齿轮ⅱ109转动,从而实现肩部矢状面上的弯曲、伸展运动。在大臂1上水平开有两条长槽孔,所述大臂固定架111通过对应设置在两条长槽孔内的螺栓连接在大臂1上,通过调节螺栓移动大臂固定架111进而调整大臂1的长度,使得大臂固定架111可以根据患者的臂长进行调整,以适应不同患者的穿戴需求。
21.如图3所示,所述大臂固定架111设置在大臂1靠近小臂的一端,且所述大臂固定架111内置海绵和绑带,穿戴方便,更符合人体手臂日常的运动状态,可以更好的为脑卒中、脑外伤等导致的运动功能障碍患者提供康复训练;所述大臂固定架111的上板连接有大臂前端支承架112b,所述大臂固定架111的下板连接有大臂前端支承架112a,所述小臂2的一端分别通过大臂前端支承架112a、大臂前端支承架112b与大臂相连,在大臂1与小臂2连接处的底部设置有带轮118,所述带轮118通过同步带ⅱ119连接有同步带轮ⅱ120;所述驱动机构ⅱ包括摆动气缸ⅲ,即肘关节在平面上的外展、内收运动由摆动气缸ⅲ116驱动,同步带轮ⅱ120与摆动气缸ⅲ116的输出轴连接,通过同步带ⅱ119与带轮118连接进行传动,摆动气缸ⅲ116与用于固定摆动气缸位置的连接板114、支承架115连接,摆动气缸ⅲ116与编码器117连接,实时检测摆动气缸116的输出角度,大臂前端支承架112a通过梯形连接板113与连接板114连接,带轮118与小臂2连接,实现将摆动气缸ⅲ116的传动传递到带轮118,带动小臂在水平面的外展、内收运动,小臂2远离大臂的一端设置有小臂固定架201,小臂2通过螺栓与小臂固定架201连接,方便患者的穿戴。
22.如图4所示,所述驱动机构ⅱ还包括摆动气缸ⅳ203,即小臂2的内旋和外旋运动由摆动气缸ⅳ203驱动,摆动气缸ⅳ203通过气缸法兰ⅱ210与气缸法兰板202连接,气缸法兰板202通过梯形连接架209与小臂固定架201连接,编码器ⅳ208与摆动气缸203连接,同步带轮ⅰ204与摆动气缸ⅳ的输出轴连接,半圆弧导轨206与导轨基体半圆弧件207、导轨滑块205
连接,所述导轨滑块205与摆动气缸法兰板202的侧板固定连接,同步带轮ⅰ204通过同步带ⅰ211连接半圆弧导轨206的上下两端,且在半圆弧导轨206两端设置有限位块,将摆动气缸ⅳ的输出传递到半圆弧导轨206,实现患者小臂在冠状面上的内旋和外旋运动。
23.进一步的,在摆动气缸法兰板202与同步带轮ⅰ平行的侧板上设置有分别对应上下端同步带211的两个惰轮,惰轮通过螺栓安装在摆动气缸法兰板202上,通过调整螺栓移动带动两个惰轮的移动,两个惰轮的相对位置接近时,进而调整同步带的张紧。
24.如图5所示,所述导轨基体半圆弧件207通过半圆弧连接块305与末端机构3相连接,所述末端机构3包括三维力传感器301、手柄303、支撑板,所述支撑板的一端底部与半圆弧连接块305相连接,所述三维力传感器301设置在支撑板底部,u型钣金件302通过螺栓与支撑板、三维力传感器301相连,所述三维力传感器301的顶部通过联轴器304与位于支撑板上方的手柄303相连接,在康复训练的过程中便于患者手臂的运动。
25.以上显示和描述了本发明的基本原理、主要特征和优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。