1.本发明涉及材料弹性模量检测技术领域,特别是指一种基于动力的玻璃弹性模量测量装置及方法。
背景技术:
2.玻璃作为现代建筑、工业、科技等领域的重要基础材料,其材料弹性模量是重要的力学参数之一。弹性模量是单向应力状态下应力与应变之比。从宏观上来讲,是衡量物体抵抗弹性变形的能力,从微观上来看,是原子、离子、及分子之间键合强度的反映。其测量方法可以归纳为基于动力和静力两种。静力法是将材料处于静力作用下,通过测量应力与应变之间的关系曲线,然后根据胡克定律以弹性形变区的线性关系计算弹性模量,但由于玻璃属于脆性材料,传统应用拉伸试验来测量材料弹性模量对试样造型要求较高,同时玻璃试样在拉力机中摆放位置的偏差非常容易造成玻璃破碎。与静力方法不同,动力法是利用材料的弹性模量与所对应的结构频率来进行测定和计算的。
3.标准《超薄玻璃弹性模量试验方法》(gb/t_37788-2019)中公开了一种基于悬臂梁理论测量玻璃弹性模量的方法,但是仅通过胶水对悬臂端进行粘接无法达到悬臂梁全面约束的理论要求,而采用悬臂梁理论计算则会导致误差较大。标准《玻璃材料弹性模量、剪切模量和泊松比试验方法》(gb/t_37780-2019)中公开了一种基于漂浮体系的动力检测方法,但众所周知,漂浮体系的动力实验对边界条件的要求较高,实际工程中难以模拟。现有技术涉及了一种利用牛顿环原理测量玻璃弹性模量的装置,公开了基于牛顿环原理测量玻璃弹性模量的装置,但对于当前牛顿环仪做到施加压力的同时通过显微镜观察中心暗斑的操作较为麻烦,且压力数值较难精确。上述标准或现有技术提供的方法对玻璃弹性模量的测量都存在较大误差或难以实现,因此,在本领域中,急需一种精确且可以重复实现的弹性模量测试方法。
技术实现要素:
4.本发明要解决的技术问题是提供一种基于动力的玻璃弹性模量测量装置及方法。
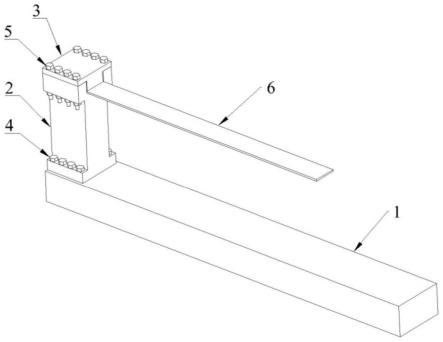
5.该装置包括底座、支座、盖板、底脚螺栓、盖板螺栓、玻璃梁、标定梁和扭力扳手,支座通过底脚螺栓固定在底座一端,使用扭力扳手用盖板螺栓将标定梁的一端固定在盖板与支座之间。
6.其中,盖板腹部与支座之间预留的垂直高度用于放置标定梁,该垂直高度不大于标定梁的厚度。
7.玻璃梁与标定梁厚度相同,玻璃梁能够替换标定梁置于盖板和支座之间。
8.应用该测量装置进行测量的方法,包括步骤如下:
9.s1:选择两根标定梁,分别记为标定梁a和标定梁b;
10.s2:用扭矩扳手将标定梁a的一端固定在盖板与支座之间;
11.s3:对标定梁a的自由端施加初始位移,使标定梁产生自由振动,测量标定梁a的一
阶自振频率fa;
12.s4:按照s2和s3测量标定梁b的一阶自振频率fb;
13.s5:根据标定梁a和标定梁b的一阶自振频率,计算盖板的竖向刚度k1和转动刚度k2;
14.s6:用扭矩扳手将待检测玻璃梁固定在盖板与支座之间,按照s3测量待检测玻璃梁的一阶自振频率f;
15.s7:根据玻璃梁的一阶频率,计算玻璃梁弹性模量eg。
16.其中,s5中盖板的竖向刚度k1和转动刚度k2的计算过程如下:
[0017][0018][0019]
式中:
[0020]
a1=eaiaka(cosh(laka)sin(laka)-cos(laka)sinh(laka)),
[0021]
a2=eaiak
a3
(cos(laka)sinh(laka) cosh(laka)sin(laka)),
[0022]
a3=-cos(laka)cosh(laka)-1,
[0023]
a4=e
a2ia2ka4
(cos(laka)cosh(laka)-1),
[0024]
b1=ebibkb(cosh(lbkb)sin(lbkb)-cos(lbkb)sinh(lbkb)),
[0025]
b2=ebibk
b3
(cos(lbkb)sinh(lbkb) cosh(lbkb)sin(lbkb)),
[0026]
b3=-cos(lbkb)cosh(lbkb)-1,
[0027]
b4=e
b2ib2kb4
(cos(lbkb)cosh(lbkb)-1),
[0028]
其中,
[0029]
ka、kb分别为标定梁a、标定梁b的系数,ea、eb分别为标定梁a、标定梁b的弹性模量;
[0030]
la、lb为标定梁a、标定梁b的长度;
[0031]
ia、ib分别为标定梁a、标定梁b的截面惯性矩,aa、ab分别为标定梁a、b的截面面积,aa=wa×
ha,ab=wb×
hb;
[0032]
wa、wb为标定梁a、标定梁b的宽度,
[0033]
ha、hb为标定梁a、标定梁b的厚度,
[0034]
ρa、ρb为标定梁a、标定梁b的密度;
[0035]
fa、fb为测得标定梁a、标定梁b的一阶自振频率,
[0036]
ωa、ωb为标定梁圆频率,ωa=2πfa,ωb=2πfb。
[0037]
s7中玻璃弹性模量的计算过程如下:
[0038]eg
igkg(cosh(lkg)sin(lkg)-cos(lkg)sinh(lkg))k1 egigk
g3
(cos(lkg)sinh(lkg) cosh(lkg)
[0039]
sin(lkg))k
2-(cos(lkg)cosh(lkg) 1)k1k2 e
g2ig2kg4
(cos(lkg)cosh(lkg)-1)=0
[0040]
式中:
[0041]
kg为玻璃梁的系数,eg为玻璃梁弹性模量,为需要求解的量;
[0042]
k1为盖板竖向刚度,
[0043]
k2为盖板转动刚度,
[0044]
l为玻璃梁的长度,
[0045]
ig为玻璃梁截面惯性矩,
[0046]ag
为玻璃梁截面面积,ag=wg×
hg;
[0047]
wg为玻璃梁的宽度,
[0048]
hg为玻璃梁的厚度,
[0049]
ρg为玻璃梁的密度;
[0050]
f为测得的玻璃梁一阶自振频率,
[0051]
ω为玻璃梁圆频率,ω=2πf。
[0052]
上述eg的求解范围为[ec,1.5ec],其中
[0053]
s2、s4和s6中,安装标定梁a、标定梁b和玻璃梁的固定盖板的盖板螺栓的扭矩大小相同。
[0054]
本发明的上述技术方案的有益效果如下:
[0055]
上述方案中,通过弹性支撑梁的振动理论来测量玻璃弹性模量。通过计算弹性梁两侧刚度大小然后根据实测频率反演玻璃弹性模量,可快速对玻璃的弹性模量进行测试,测试结果精度高,且实验安装简单,易于操作,检测速度快,并且属于无损检测。该方法对于检测玻璃弹性模量具有测试精确、安全无损、方便经济的优点,适用于工程实际。
附图说明
[0056]
图1为本发明的基于动力的玻璃弹性模量测量装置结构示意图;
[0057]
图2为本发明的基于动力的玻璃弹性模量测量装置的配件图;
[0058]
图3为本发明的基于动力的玻璃弹性模量测量方法的检测流程示意图;
[0059]
图4为本发明实施例中标定梁a长度为0.4m的自由振动信号;
[0060]
图5为本发明实施例中标定梁b长度为0.5m的自由振动信号;
[0061]
图6为本发明实施例中待检测玻璃梁长度为0.6m的自由振动信号。
[0062]
其中:1-底座;2-支座;3-盖板;4-底脚螺栓;5-盖板螺栓;6-玻璃梁;7-标定梁a;8-标定梁b;9-扭力扳手。
具体实施方式
[0063]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0064]
本发明提供一种基于动力的玻璃弹性模量测量装置及方法。
[0065]
如图1和图2所示,该装置包括底座1、支座2、盖板3、底脚螺栓4、盖板螺栓5、玻璃梁6、标定梁和扭力扳手9,
[0066]
支座2通过底脚螺栓4固定在底座1一端,使用扭力扳手9用盖板螺栓5将标定梁6的一端固定在盖板3与支座2之间。
[0067]
其中,盖板3腹部与支座2之间预留的垂直高度用于放置标定梁,该垂直高度不大于标定梁的厚度。
[0068]
玻璃梁6与标定梁厚度相同,玻璃梁6能够替换标定梁置于盖板3和支座2之间。
[0069]
如图3所示,该测量装置的测量方法,包括步骤如下:
[0070]
s1:选择两根标定梁,分别记为标定梁a7和标定梁b8;
[0071]
s2:用扭矩扳手9将标定梁a7的一端固定在盖板3与支座2之间;
[0072]
s3:对标定梁a7的自由端施加初始位移,使标定梁产生自由振动,测量标定梁a的一阶自振频率fa;
[0073]
s4:按照s2和s3测量标定梁b8的一阶自振频率fb;
[0074]
s5:根据标定梁a和标定梁b的一阶自振频率,计算盖板的竖向刚度k1和转动刚度k2;
[0075]
s6:用扭矩扳手9将待检测玻璃梁6固定在盖板3与支座2之间,按照s3测量待检测玻璃梁6的一阶自振频率f;
[0076]
s7:根据玻璃梁的一阶频率,计算玻璃梁弹性模量eg。
[0077]
下面结合具体实施例予以说明。
[0078]
在测量时,首先将标定梁a7一端放置于支座2中,将盖板3翼部通过盖板螺栓5将标定梁a7与支座固定,通过扭矩扳手确定每个螺栓的扭矩大小为6.5n
·
m。其中标定梁a7长为0.4m,宽为0.0398m,高为0.0059m,密度为2515.1kg/m3,弹性模量为74.13gpa,标定梁b8长为0.5m,宽为0.0398m,高为0.0059m,密度为2515.1kg/m3,弹性模量为74.13gpa。
[0079]
取标定梁a7,由激光位移传感器测得自由振动时程信号如图4所示,根据下式计算自由振动的一阶频率。
[0080][0081]
式中,ti为第i个振动峰值对应的时间,t
i j
为相隔j周振动峰值对应的时间。计算如下表1所示。平均两次计算结果,得一阶自振频率为31.355hz。
[0082]
表1频率计算
[0083]
次数ti(s)t
i j
(s)jf(hz)1
st
3.0133.9703031.3562
nd
5.0235.9803031.353
[0084]
取标定梁b8,使用扭矩扳手确定每个螺栓的扭矩大小为6.5n
·
m。按照同样方式再测得信号如图5所示,计算如表2所示,测得自由振动一阶频率为20.194hz。
[0085]
表2频率计算
[0086]
次数ti(s)t
i j
(s)jf(hz)1
st
3.0223.9631920.1932
nd
5.0525.9931920.195
[0087]
将两根标定梁的一阶频率及相关参数代入支座刚度计算方程中:
[0088][0089][0090]
式中:
[0091]
a1=eaiaka(cosh(laka)sin(laka)-cos(laka)sinh(laka)),
[0092]
a2=eaiak
a3
(cos(laka)sinh(laka) cosh(laka)sin(laka)),
[0093]
a3=-cos(laka)cosh(laka)-1,
[0094]
a4=e
a2ia2ka4
(cos(laka)cosh(laka)-1),
[0095]
b1=ebibkb(cosh(lbkb)sin(lbkb)-cos(lbkb)sinh(lbkb)),
[0096]
b2=ebibk
b3
(cos(lbkb)sinh(lbkb) cosh(lbkb)sin(lbkb)),
[0097]
b3=-cos(lbkb)cosh(lbkb)-1,
[0098]
b4=e
b2ib2kb4
(cos(lbkb)cosh(lbkb)-1),
[0099]
其中,
[0100]
ka、kb分别为标定梁a、标定梁b的系数,
[0101]
ea、eb分别为标定梁a、标定梁b的弹性模量;
[0102]
la、lb为标定梁a、标定梁b的长度;
[0103]
为标定梁a、标定梁b的截面惯性矩,
[0104]aa
=wa×
ha,ab=wb×
hb为标定梁a、b的截面面积,
[0105]
wa、wb为标定梁a、标定梁b的宽度,
[0106]
ha、hb为标定梁a、标定梁b的厚度,
[0107]
ρa、ρb为标定梁a、标定梁b的密度;
[0108]
fa、fb为测得标定梁a、标定梁b的一阶自振频率,分别为31.355hz和20.194hz,
[0109]
ωa=2πfa,ωb=2πfb为标定梁圆频率。
[0110]
求解得出k1为3.28
×
106n/m,k2为8.17
×
103n/m。将计算得到的k1,k2带到下式中,得玻璃弹性模量计算方程为:
[0111][0112]
式中:
[0113]
kg为玻璃梁的系数,
[0114]eg
为玻璃梁弹性模量,为需要求解的量,
[0115]
k1为盖板竖向刚度为3.28
×
106n/m,
[0116]
k2为盖板转动刚度为8.17
×
103n/m,
[0117]
l为玻璃梁的长度,
[0118]
为玻璃梁的截面惯性矩,
[0119]ag
=wg×
hg为玻璃梁截面面积,
[0120]
wg为玻璃梁的宽度,
[0121]
hg为玻璃梁的厚度,
[0122]
ρg为玻璃梁的密度,
[0123]
f为测得玻璃梁一阶自振频率,
[0124]
ω=2πf为玻璃梁圆频率。
[0125]
取长度为0.6m的待检测玻璃梁,通过游标卡尺和天平测出待检测玻璃梁宽0.0398m,高为0.0059m,密度为2515.1kg/m3,将待检测玻璃梁进行固定,使用扭矩扳手确定每个螺栓的扭矩大小为6.5n
·
m。测得自由振动信号如图6所示,计算频率如下表3所示,计算弹性模量的一阶频率为14.045hz,再将相关参数带入式(4)中,根据解的求解范围为[70.03gpa,106.9gpa],计算得到该玻璃弹性模量为73.72gpa。
[0126]
表3频率计算
[0127]
次数ti(s)t
i j
(s)jf(hz)1
st
5.0515.9771314.0402
nd
10.03710.9621314.050
[0128]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。