1.本发明涉及车辆控制技术领域,更具体地说,涉及一种摆动三轮电驱车控制系统。
背景技术:
2.目前现有的三轮电驱车,即电力驱动车,一般为电机驱动单个前轮和两个后轮的小型三轮车辆。
3.电动车现有技术可参考授权公告号为cn111268006a的中国发明专利,其公开了一种电动配送车控制系统,包括电源系统、二合一控制器、监测控制系统和轮廓电机等。电源系统为轮廓电机、二合一控制器和检测控制系统供电,监测控制系统对二合一控制器的信号复检。
4.摆动式车辆现有技术可参考授权公告号为 的中国发明专利,其公开了一种摆动式车辆,包括前车体及前轮、后车体及左右驱动轮、摆动机构。
5.上述的现有技术方案存在以下缺陷:电动配送车缺乏姿态解算和转弯控制,行驶过程中容易发生颠簸和车体的倾斜,配送车底盘顶部货柜内物品容易发生晃动影响车体平衡。摆动式车辆和电动配送车缺乏人机交互、显示车辆状态的信号输出模块、覆盖短距离至长距离的通信模块及定位模块,缺乏对车辆状态信息的获取及调试。
技术实现要素:
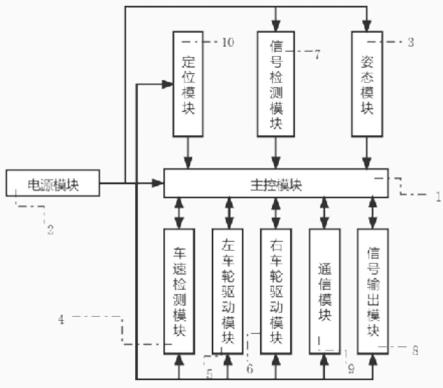
6.本发明提供一种摆动三轮电驱车控制系统,提供车体在行驶过程中的自平衡和车辆状态信息获取。
7.为实现上述目的,本发明提供了如下技术方案:一种摆动三轮电驱车控制系统,包括设置于车体上并控制车辆各功能模块的主控模块,为电机驱动、主控模块和其他功能模块供电的电源模块,提供前后车摆动角获取及车辆姿态解算与平衡的姿态模块,检测前车轮速度,即整车速度的车速检测模块,分别检测左右车轮速度及驱动的左车轮驱动模块和右车轮驱动模块,检测外部信号的信号检测模块,输出车辆信息及提示的信号输出模块,覆盖短距离至长距离的通信模块和车辆远程定位模块;其中,电源模块包括变压单元、蓄电池和电量反馈单元,蓄电池为控制系统内主控模块及各功能模块供电,变压单元接收蓄电池输出的高压电并转化为指定单元所需的低压电;电量反馈单元将蓄电池内储电情况实时反馈至主控单元并由主控单元输出至信号输出单元,信号输出单元的显示模块实时显示电量情况并在接收缺电信号后通过显示模块和语音输出模块进行缺电提示;主控模块连接电源模块、姿态模块、车速检测模块、左车轮驱动模块、右车轮驱动模块、信号检测模块、信号输出模块、通信模块和定位模块,主控模块包括计算单元、存储单元、主控单元、转弯控制单元,计算单元对车速变化量和车辆位置信息等进行计算;存储单元存储主控模块运行的必要程序和数据信息;主控单元接收功能模块的反馈信息并传达控
制命令;转弯控制单元获取左车轮车速及右车轮车速,通过转弯角度和左右车轮车速比的关系计算左右车轮的速度变化量并将信息传递回主控模块的主控单元,主控单元发送控制命令控制驱动模块速度变化为计算值,主控模块由电源模块供电,接收来自车速检测模块获取的前轮速度信息,左车轮车速传感器和右车轮车速传感器的速度信息,姿态模块的摆动角信息,信号检测模块的控制、制动、压力、锁止检测信息,定位模块的车辆定位信息,通信模块传输的数据以及电源模块的电量反馈信号,主控单元接收各功能模块信号并输出控制指令,反馈车辆状态信息,输出数据信号;姿态模块内的姿态传感器包含两种传感器,即三轴陀螺仪和三轴加速度计,内含16位a/d转换器;姿态模块内的数据融合将陀螺仪和加速度计传感器获取的角度和加速度模拟信息转化为数字信息经由姿态模块内数据融合单元计算得到稳定车体姿态的反向摆动角信息,并将信号传递至主控模块;车速检测模块,与摆动三轮车体的前车轮关联,车速检测模块的前轮车速传感器检测前车轮速度并输出至主控模块;左车轮驱动模块和右车轮驱动模块分别通过车速传感器接收车轮速度信息并输出至主控模块,主控模块的转弯控制单元对左车轮和右车轮的速度返回值解算,左车轮驱动模块和右车轮驱动模块在接收主控模块输出的控制信号后,控制左车轮和右车轮驱动,使左车轮和右车轮车速差接近理想值,保证车体转弯的平稳性;信号检测模块包含控制检测单元、制动检测单元、压力检测单元和锁止检测单元,信号检测模块接收车体握把、按键、压力传感器、锁止控制的状态并输出,主控模块接收检测信号后执行相应的控制、制动、锁止信号控制命令,输出车体状态信息。
8.信号输出模块包含显示单元、灯控单元、语音输出单元,信号输出模块调用主控模块输出的车辆状态信息,通过显示模块显示车辆前后车体摆动状态、车辆定位信息、车体电量情况、车速、车辆故障信息,语音输出模块根据车辆信息对车辆控制操作输出语音提示以及对车辆的倒车、缺电、故障情况进行语音报警,灯控单元包含转向灯控制、倒车灯控制、夜视灯控制、指令反馈灯控制,调用车辆状态信息和控制指令对显示单元和语音输出单元的信号输出辅以灯光提示;通信模块包含蓝牙模块、4g通信模块、5g通信模块、覆盖车辆短距离至长距离通信需求;其中,蓝牙和4g通信模块满足短途和长途的低速传输需求,实现移动终端或pc与摆动三轮电驱车的数据通信,5g通信模块满足需要高通量数据通信的应用;定位模块采用北斗导航模块获取车辆定位信息(时间、经度、纬度、高度),通过uart串口与主控模块连接,返回定位信息至主控模块。定位信息可由主控模块接收后通过通信模块发送至终端。
9.优选的,电源模块包含蓄电池、变压单元和电量反馈;蓄电池用于为摆动三轮车的驱动电机(左车轮驱动电机和右车轮驱动电机)供电;变压单元将蓄电池的高压电转为低压电并为主控模块、姿态模块、左车轮驱动模块、右车轮驱动模块、信号检测模块、信号输出模块、通信模块、定位模块供电;电量反馈用于检测蓄电池电量情况并将电量信息反馈至主控模块,主控模块将电量信息发送至信号输出模块用于显示单元的电量显示。
10.通过采用上述技术方案,控制系统能够实现驱动电机与功能模块的分别供电,用户向摆动三轮电驱车充电的电量存于蓄电池中,电量情况和充电情况能够被主控模块获取
并能在显示屏上实时显示。
11.优选的,姿态模块包括姿态传感器和数据融合模块,主控模块通过i2c总线获取姿态模块数据,姿态传感器采集车体倾斜角和倾角变化速度信息,其中,加速度计和陀螺仪分别获取加速度信息和角速度信息,为了获取准确的车体倾角值,对加速度计和陀螺仪的输出值进行融合,采用卡尔曼滤波方法,递归获得最优的车体角度值。
12.优选的,姿态模块输出车体姿态信息至主控模块,主控模块发送车辆状态信息至信号输出模块,主控模块整合车体倾角、车体速度、位置、左车轮车速、右车轮车速信息,通过控制算法控制左车轮驱动电机和右车轮驱动电机。
13.优选的,左车轮驱动模块和右车轮驱动模块分别通过左车轮车速传感器和右车轮车速传感器输出车速至主控模块,主控模块整合信息后向左车轮驱动电机和右车轮驱动电机,发出控制指令,分别改变左车轮和右车轮车速。
14.通过采用上述技术方案,摆动三轮电驱车根据车体倾角和车速改变左车轮和右车轮速度,实现车体自平衡,车体倾角通过显示单元实时反馈至用户。
15.优选的,信号检测模块包括控制检测单元、制动检测单元、压力检测单元和锁止检测单元,控制检测单元和制动检测单元检测车体摆手控制,包括用户的加速、转向、制动控制;压力检测单元通过车座下方的压力传感器获取驾驶员是否就位的信息,对于压力信息的突然减小,将信息传递至主控模块进行车体制动,保证安全性;锁止检测单元检测驾驶员操作的锁止控制操作并将信息输出至主控模块。
16.优选的,主控模块接收锁止控制信息后发送锁止控制命令至锁止机构,车体锁止机构响应命令,车体停止自平衡,主控模块不再根据车体倾角动态控制左车轮和右车轮车速变化,车体倾角固定。
17.通过采用上述技术方案,摆动三轮电驱车能够根据驾驶员操作进行车速控制、制动和锁止控制,车辆能够检测车座压力情况进行紧急制动,增强安全性。
18.优选的,信号输出模块包括显示单元,灯控单元和语音输出单元。信号输出模块接收主控模块传输的车辆信息和控制命令并调用相应单元执行信号输出。
19.优选的,显示单元下的oled显示屏接收主控单元输出的车体状态(倾斜角)信息、自平衡模式开关状态、车辆位置、电量情况、车速、时间信息并显示出来;灯控模块接收主控模块发出的控制信息,执行行车灯的开关和调节,对车体异常情况控制报警灯闪烁;语音输出单元接收主控模块命令,控制电动车音响执行语音播报,播报包括位置、车速、倒车、缺电警告、安全警示、防盗报警、控制命令反馈、自平衡开启与关闭提示等。
20.通过采用上述技术方案,摆动三轮电驱车能够通过画面、灯效、声音向用户反馈车辆状态信息,便于用户了解车辆情况并执行操作。对车辆位置的获取、防盗报警、安全警告等增强了车辆安全性和驾驶员安全。
21.优选的,通信模块包括蓝牙模块,4g通信模块,5g通信模块,其中,移动设备或pc通过蓝牙模块与主控模块连接,实现车辆状态查看,主控程序设置等低速应用;设备通过4g通信模块和5g通信模块与主控模块连接,支持远程管理,包括车辆状态和位置获取、远程参数设置、程序升级、防盗追踪等;5g通信模块支持设备与车辆的高通量数据通信。
22.通过采用上述技术方案,设备能够与车辆远程通信,在多个设备端获取车辆状态信息并支持远程设置和程序升级;支持短距离蓝牙通信,实现低耗、低速的应用功能。
23.优选的,定位模块通过北斗接收模块实现,北斗接收模块通过uart串口与主控模块连接,获取时间、经度、纬度、高度信息并发送信息至主控模块。
24.优选的,主控模块获取定位信息后发送信息至信号输出模块,信号输出模块中的显示单元将定位信息显示在oled显示屏上;主控模块通过4g/5g通信模块远程发送定位信息至终端,终端可以远程查看车辆位置等信息。
25.通过采用上述技术方案,驾驶员和终端均能获取车辆定位信息,辅助实现车辆远程定位和远程管理功能,增强了车辆防丢失功能。远程管理包括参数设置、程序升级,远程对车辆操作大幅节约人力和维护成本。
26.综上所述,本发明具有以下有益效果:1.本控制系统能够获取车辆的姿态信息,并能对姿态解算获得更精确的倾斜角信息。在车辆转弯时针对车体倾斜角变化动态改变左车轮和右车轮速度,实现车辆自平衡,保障车辆行驶的稳定性。自平衡功能可通过锁止控制关闭,锁止机构将车体倾斜角固定,在无平衡需求下节约计算量和能耗,灵活适应驾驶员的实时需求。
27.2.本系统对车辆状态实时监控,通过信号输出模块反馈车辆的位置、电量、速度、姿态、模式信息,从显示画面、灯效和声音上响应控制命令,优化了人机交互体验。
28.3.本系统支持远程通信和定位,利用通信模块和定位模块使车辆具备远程管理和定位功能,支持远程参数设置、程序升级、位置获取、防丢失追踪等功能,保障了车辆安全性,提高了车辆信息获取和调试的便利性。
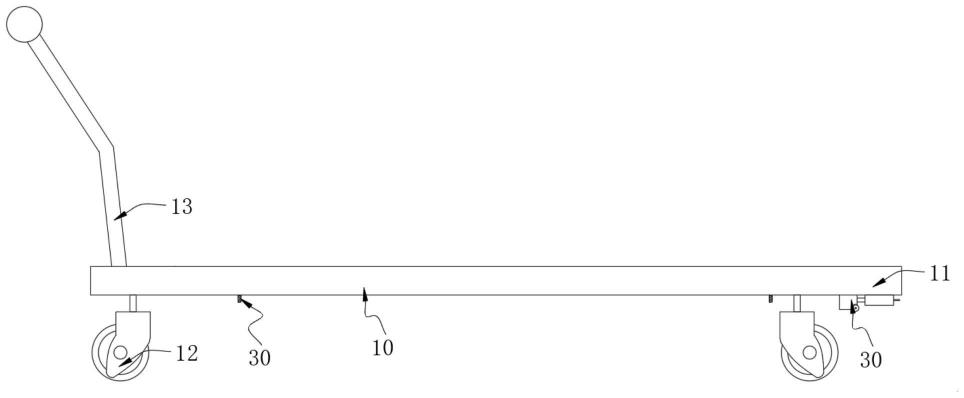
附图说明
29.图1是实施例中的控制系统的整体框图;图2是实施例中突出电源模块的系统框图;图3是实施例中突出姿态模块的系统框图;图4是实施例中突出左车轮驱动模块的系统框图;图5是实施例中突出右车车轮驱动模块的系统框图;图6是实施例中突出信号检测模块的系统框图;图7是实施例中突出信号输出模块的系统框图;图8是实施例中突出通信模块的系统框图;图9是实施例中突出定位模块的系统框图。
30.图中:1、主控模块;2、电源模块;3、姿态模块;4、车速检测模块;5、左车轮驱动模块;6、右车轮驱动模块;7、信号检测模块;8、信号输出模块;9、通信模块;10、定位模块;11、4g通信模块;12、5g通信模块;13、左车轮车速传感器;14、右车轮车速传感器;15、左车轮驱动电机;16、右车轮驱动电机;17、姿态传感器;18、数据融合模块;19、北斗接收模块;20、设备;21、蓄电池;22、变压单元;23、电量反馈;24、显示单元;25、灯控单元;26、语音输出单元;27、加速度计;28、陀螺仪;29、oled显示屏;30、行车灯;31、报警灯;32、电动车音响;33、控制检测单元;34、制动检测单元;35、压力检测单元;36、锁止检测单元;37、把手控制;38、压力传感器;39、锁止控制。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.本发明的摆动式三轮电驱车,车辆主要由前车轮、两轮后驱(左车轮和右车轮)、车座、运输箱体、前车体、后车体及前后车体间的转动锁止机构组成。摆动三轮电驱车的控制系统,如图2所示,包括设置于车体左侧和右侧的驱动电机,主控模块及信号检测、输出、驱动、通信、定位等各功能模块。摆动三轮电驱车设有电源模块,可变压电源模块为车体驱动电机、主控模块及其他各功能模块供电。
33.如图1和图2所示,可变压电源模块2包括蓄电池21,变压单元22和电量反馈单元23,整体控制系统的高压和低压部分分开供电,蓄电池21用于为提供车辆动力的左车轮驱动电机15和右车轮驱动电机16供电,蓄电池21的高压电经变压单元22的高压转低压处理后用于为主控模块1、姿态模块3、车速检测模块4、左车轮驱动模块5、右车轮驱动模块6、信号检测模块7、信号输出模块8、通信模块9、定位模块10供电。
34.如图1和图6所示,信号检测模块7包括控制检测单元33、制动检测单元34、压力检测单元35、锁止检测单元36。信号检测模块将把手控制37、压力传感器38和锁止控制39的信号输出给各检测单元,由检测单元将信号输出至主控模块。把手控制37包括加速控制、制动控制、行车灯控制,当主控模块1接收到加速信号或制动信号时,发送控制命令至左车轮驱动模块5和右车轮驱动模块6,控制驱动电机调节。当压力传感器38检测压力强度突变时,压力检测单元35发送信号至主控模块1,主控模块1输出制动命令控制电机制动,并通过信号输出模块8输出声音和报警灯提示,以保障安全性。驾驶员使用锁止控制39后,主控模块1接收锁止检测单元36发来的信号并控制锁止机构锁死,车体倾角不再变化,车辆不再对前后车体转动做出自平衡控制,此后可通过锁止控制39解除锁止并恢复车辆自平衡状态。
35.如图9所示,定位模块10采用北斗接收模块19,通信模块9包括蓝牙模块40、4g通信模块11、5g通信模块12,车辆行进过程中实时获取定位模块输出的时间、经度、纬度、高度信息,通过串口发送至主控模块1,主控模块解析信息输出至信号输出模块8,信号输出模块接收信息并通过显示单元24再显示屏29上显示车辆位置。通过通信模块9,主控模块可以使用蓝牙模块40、4g通信模块11、5g通信模块14与终端实现短距离和长距离通信,蓝牙模块40满足短距离、低速低功耗的传输需求,高通量数据通信可通过5g通信模块12实现。定位信息由主控模块获取后通过通信模块9发出,设备通过通信模块9和主控模块1的信号传输进行远程管理,包括车辆信息获取、远程参数设置、程序升级等,并可进行远程追踪,保障车辆防盗性。
36.如图1和图3所示,姿态模块3包括姿态传感器17和数据融合模块18,姿态传感器包括加速度计27和陀螺仪28。车辆行进过程中,当发生任意方向和角度的转向导致前车体相对后车体产生倾斜角时,姿态传感器17获取的信息经由数据融合18发送至主控模块1。根据测试数据,主控模块解析倾斜角并对左车轮驱动模块5和右车轮驱动模块6调节左车轮和右车轮的车速,使得车速比例变化、调节车辆平衡状态,左车轮和右车轮的车速比例与车体倾斜角满足测试数据得到的数学关系。当信号检测模块7检测到锁止控制39并输出至主控模
块1时,主控模块1控制锁止机构锁死,车辆倾斜角固定,主控模块1仅根据前车轮的车速检测模块4获取的车速控制左车轮驱动15和右车轮驱动16。
37.如图1和图7所示,信号输出模块8包括显示单元24、灯控单元25、语音输出单元26。主控模块1接收信号检测模块7发来的把手控制中37的行车灯信号,输出控制命令至主控单元25,打开或关闭行车灯30。主控模块1接收压力检测单元35输出的压力检测信号、电量反馈单元23输出的缺电信号、车速检测单元4输出的车速、锁止检测单元36发出的锁止信号并解析发送至信号输出模块8,对车辆异常情况或控制命令通过灯控单元25和语音输出单元26,控制报警灯1和电动车音响32进行报警提示和语音提示或响应,通过以上方式优化人机交互体验,保障车辆行进的安全性。当车速检测模块4检测车速高于预设值时,语音输出模块26对驾驶员进行语音提示。主控模块1接收的车辆状态信息包括电量信息、车速信息、定位信息、倾角信息、车辆运行模式(自平衡或锁止),主控模块1将以上信息输出至信号输出模块8中的显示单元24,显示单元将车辆状态信息通过显示屏29反馈给驾驶员。
38.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。