1.本实用新型涉及电机技术领域,具体地说是一种双编码器减速力矩电机。
背景技术:
2.现有技术中的力矩电机多为单一本体,其并没有设置减速器、编码器等器件,最多只集成了一个霍尔器件用于粗定位,而用户想要对力矩电机进行控制需额外匹配编码器、驱动器等部件,另外也有部分整体式的力矩电机包含有编码器,但仅仅只集成了一个编码器在电机输入端,电机输出端同样没有设置减速器及额外的编码器,这难以实现电机更为精准的控制要求。除此之外,电机、编码器、驱动器的配合使用也相当繁琐,涉及到安装、对准、线缆连接等诸多方面。
技术实现要素:
3.本实用新型的目的在于提供一种双编码器减速力矩电机,可实现输入、输出双转角信息记录,使电机控制更加精准,并且在利用电机中空结构安装行星轮系形成减速器的同时,不必额外匹配驱动器等结构,实现了电机小型化和高集成化设计要求。
4.本实用新型的目的是通过以下技术方案来实现的:
5.一种双编码器减速力矩电机,包括机壳、转子、定子、中心轴、输出轴和行星轮系,其中转子中部设有中心轴,且所述中心轴一端与行星轮系中心的太阳齿轮固连、另一端设有磁极,所述机壳上设有与所述磁极配合的传感器基板,所述输出轴转动设于机壳远离所述传感器基板一侧,且所述输出轴与所述行星轮系中的行星齿轮连接,所述输出轴上套装有磁环,所述机壳上靠近所述磁环一侧设有驱动器基板,且所述驱动器基板上设有驱动芯片以及与所述磁环配合的感应传感器。
6.所述转子包括转子侧壁、转子连接部和转子轴套,其中转子侧壁通过转子连接部与中心处的转子轴套连接,所述中心轴设于所述转子轴套中,并且所述中心轴通过一个支撑轴与所述输出轴转动连接。
7.所述机壳包括第一侧板和第二侧板,所述转子轴套通过第一轴承支撑安装于所述第一侧板中部,所述输出轴通过第二轴承支撑安装于所述第二侧板中部,且所述第一侧板外侧设有传感器基板,所述第二侧板外侧设有驱动器基板。
8.所述驱动器基板呈半环状套设于所述磁环外侧。
9.所述第二侧板内侧设有限位立板,所述定子设于所述转子侧壁和所述限位立板之间,所述行星轮系的齿圈设于所述限位立板内侧。
10.所述中心轴内部设有通孔,所述支撑轴一端插装于所述中心轴的通孔中,另一端通过第三轴承支撑安装于所述输出轴中部。
11.本实用新型的优点与积极效果为:
12.1、本实用新型利用传感器基板和磁极构成输入端编码器用于正常驱控电机并记录电机转子转角信息,利用驱动器基板上的感应传感器和磁环构成输出端编码器记录经过
行星轮系减速后的输出轴转角信息,同时还可计算出外界扰动及弹性体变形信息,从而通过输入、输出双转角信息记录使电机控制更加精准。
13.2、本实用新型充分利用电机中空结构嵌套安装行星轮系形成减速器,不占用额外空间,并且驱动器基板上集成的驱动芯片可实现电机驱动控制,不必额外匹配驱动器,实现了电机小型化和高集成化设计要求,降低了电机成本。
14.3、本实用新型由传感器基板和磁极构成的输入端编码器为同轴结构,而驱动器基板和磁环构成的输出端编码器为离轴结构,这更利于电机的小型集成化化设计,同时方便对外安装,并且本实用新型的双编码器均采用磁电原理且均为多圈绝对值编码器,具有低成本、耐污染、抗冲击等优点,可适用于条件恶劣环境。
附图说明
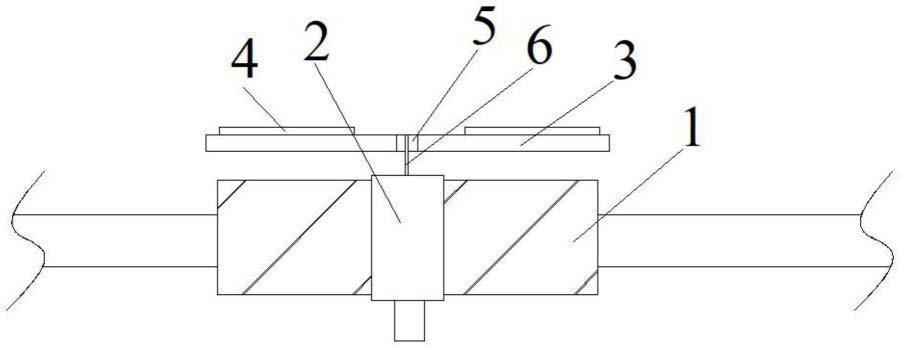
15.图1为本实用新型的立体示意图,
16.图2为本实用新型另一角度的立体示意图,
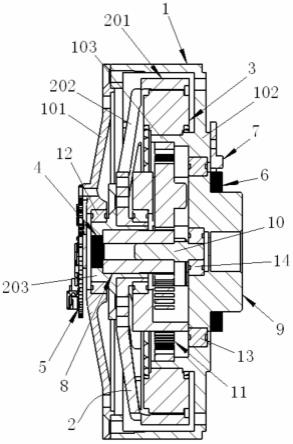
17.图3为本实用新型的剖视图,
18.图4为图3中的行星轮系示意图。
19.其中,1为机壳,101为第一侧板,102为第二侧板,103为限位立板,2为转子,201为转子侧壁,202为转子连接部,203为转子轴套,3为定子,4为磁极,5为传感器基板,6为磁环,7为驱动器基板,8为中心轴,9为输出轴,10为支撑轴,11为行星轮系,111为行星齿轮,112为齿圈,113为太阳齿轮,12为第一轴承,13为第二轴承,14为第三轴承。
具体实施方式
20.下面结合附图对本实用新型作进一步详述。
21.如图1~4所示,本实用新型包括机壳1、转子2、定子3、中心轴8、输出轴9和行星轮系11,其中转子2中部设有中心轴8,且所述中心轴8一端与行星轮系11中心的太阳齿轮113固连、另一端设有磁极4,所述机壳1上设有与所述磁极4配合的传感器基板5,输出轴9转动设于机壳1远离所述传感器基板5一侧,且所述输出轴9与所述行星轮系11中的行星齿轮111连接,所述输出轴9上套装有磁环6,所述机壳1上靠近所述磁环6一侧设有驱动器基板7,且所述驱动器基板7上设有驱动芯片以及与所述磁环6配合的感应传感器。本实用新型工作时,所述传感器基板5实时检测磁极4磁场变化,所述传感器基板5和磁极4即构成输入端编码器用于正常驱控电机并记录电机转子2转角信息,而所述驱动器基板7上的感应传感器检测磁环6磁场变化,也即构成输出端编码器记录经过行星轮系11减速后的输出轴9的转角信息,而所述驱动器基板7上的驱动芯片可实现电机驱动控制,不必额外匹配驱动器。所述传感器基板5、磁极4、驱动器基板7和磁环6的设计及工作原理均为本领域公知技术,本实施例中,双编码器均采用磁电原理且均为多圈绝对值编码器,具有低成本、耐污染、抗冲击等优点,可适用于条件恶劣环境。
22.如图3所示,所述转子2包括转子侧壁201、转子连接部202和转子轴套203,转子侧壁201通过转子连接部202与中心处的转子轴套203连接,所述中心轴8设于所述转子轴套203中,并且磁极4嵌装于所述转子轴套203端部,所述机壳1包括第一侧板101和第二侧板102,所述转子轴套203一端通过第一轴承12支撑安装于所述第一侧板101中部,且所述传感
器基板5固装于所述第一侧板101外侧,所述输出轴9通过第二轴承13支撑安装于所述第二侧板102中部,且所述驱动器基板7固装于所述第二侧板102外侧并呈半环状套设于所述磁环6外侧,如图3所示,所述中心轴8通过一个支撑轴10与所述输出轴9转动连接,其中所述中心轴8内部设有通孔,所述支撑轴10一端插装于所述中心轴8的通孔中,另一端通过第三轴承14支撑安装于所述输出轴9中部。
23.如图3所示,所述第二侧板102内侧设有限位立板103,所述定子3设于所述转子侧壁201和所述限位立板103之间,如图4所示,所述行星轮系11包括多个行星齿轮111和齿圈112,所述齿圈112设于所述限位立板103内侧,各个行星齿轮111一侧与所述齿圈112啮合,另一侧与套装于所述中心轴8上的太阳齿轮113啮合。
24.本实用新型的工作原理为:
25.如图1~4所示,本实用新型工作时,转子2带动中心轴8转动,中心轴8通过太阳齿轮113驱动各个行星齿轮111沿着齿圈113圆周滚动,行星齿轮111带动所述输出轴9转动,而所述支撑轴10由于端部通过第三轴承14支撑与输出轴9转动连接,因此其不会影响中心轴8和输出轴9分别独立旋转。另外本实用新型工作时,所述传感器基板5实时检测磁极4磁场变化,从而构成输入端编码器用于正常驱控电机并记录电机转子2转角信息,而所述驱动器基板7上的感应传感器检测磁环6磁场变化,从而构成输出端编码器记录经过行星轮系11减速后的输出轴9的转角信息,同时还可计算出外界扰动及弹性体变形信息,本实用新型即通过输入、输出双转角信息记录使电机控制更精准,而所述驱动器基板7上的驱动芯片可实现电机驱动控制,不必额外匹配驱动器,并且本实用新型充分利用电机中空结构嵌套安装行星轮系形成减速器,不占用额外空间,从而实现小型化高集成化设计要求,降低电机成本。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。