1.本发明涉及一种地图信息系统,该地图信息系统包括设置在车辆中的控制器以及配置成存储用于车辆自主行驶的高精度地图的地图服务器。特别地,本发明涉及一种地图信息系统,其中,地图服务器基于由安装在车辆上的传感器获取的信息更新高精度地图。
背景技术:
2.传统的地图信息系统包括数据库管理装置,该数据库管理装置管理地图数据库以便协助车辆的驾驶(例如,jp2020-60369a)。地图数据库存储指示与停止线或人行横道对应的路面标线位置的地图信息。
3.数据库管理装置从设置有车载传感器的车辆获取指示车辆的驾驶环境的驾驶环境信息。此外,数据库管理装置基于驾驶环境信息获取车辆行为以及候选路面标线。候选路面标线是车辆周围的候选路面标线。车辆行为是车辆在经过候选路面标线时的行为。此外,数据库管理装置基于车辆行为,获取指示候选路面标线的确定性的评价值,并将评价值等于或高于阈值的候选路面标线登记为地图信息中的路面标线。
4.在jp2020-60369a中公开的地图信息系统中,对应于停止线或人行横道的路面标线是基于驾驶环境信息获取的,并登记在地图信息中。然而,还需要分支路线信息,以使车辆自主行驶。因此,强烈期望开发一种基于来自设置在车辆中的传感器的信息获取分支路线信息的技术,以提高包括在高精度地图中的信息的精确度。
技术实现要素:
5.鉴于以上背景,本发明的一个目的是提供一种地图信息系统,该地图信息系统包括至少一个车辆以及地图服务器,该地图服务器配置成与所述车辆通信并存储高精度地图,并且可以获取分支路线信息,并在分支路线新建立时更新高精度地图。
6.为了实现这样的目的,本发明的一个方面提供了一种地图信息系统1、101、201,所述地图信息系统包括:至少一个车辆v;以及地图服务器3,所述地图服务器配置成与所述车辆通信并存储高精度地图,其中,所述车辆包括:转弯信号操作杆传感器12a,所述转弯信号操作杆传感器被配置成检测驾驶员的转弯信号操作;外部环境传感器7,所述外部环境传感器被配置成获取所述车辆的周围环境信息;自车位置识别装置10,所述自车位置识别装置配置成识别所述车辆的位置;以及控制器16,所述控制器与所述转弯信号操作杆传感器、所述自车位置识别装置和所述外部环境传感器连接,并配置成向所述地图服务器传输所述转弯信号操作、所述车辆的位置和所述周围环境信息,并且当将存储在所述地图服务器中的所述高精度地图与所述转弯信号操作进行比较并确定存在分支路线时,所述地图服务器基于由所述外部环境传感器获取的信息更新所述高精度地图。
7.根据该方面,地图服务器基于转弯信号的操作来确定分支路线是否是新建立的,从而能够更精确地确定并更快速地检测分支路线的新建立。因此,能够提高高精度地图的精度。
8.在以上方面中,优选地,所述至少一个车辆包括多个车辆,并且所述地图服务器被配置成从每个所述车辆获取由所述转弯信号操作杆传感器检测到的所述转弯信号操作以及所述车辆进行所述转弯信号操作的位置,并基于来自每个所述车辆的信息确定是否需要更新所述高精度地图。
9.根据该方面,基于来自多个车辆的信息确定是否需要更新高精度地图。因此,能够防止基于不正确的信息更新高精度地图,从而提高高精度地图的精确性。
10.在以上方面中,优选地,在所述高精度地图不包含与所述转弯信号操作的检测时从所述多个车辆中的一个车辆的位置进行所述转弯信号操作相对应的所述多个车辆中的所述一个车辆的行驶方向上的道路的情况下,所述地图服务器确定在所述转弯信号操作后所述多个车辆的行驶历史是否与正在同一行驶方向行驶的所述多个车辆相互一致,并且在所述转弯信号操作后所述多个车辆的行驶历史相互一致的情况下,所述地图服务器确定需要更新所述高精度地图。
11.根据该方面,是否需要更新高精度地图是基于车辆的行驶历史是否相互一致来确定的。因此,能够防止基于不正确的信息更新高精度地图,从而提高高精度地图的精确性。
12.在以上方面中,优选地,所述地图服务器配置成绘制指示在所述转弯信号操作后所述多个车辆的行驶历史的点,并基于指示所述行驶历史的点的密度确定在所述转弯信号操作后所述多个车辆的行驶历史是否相互一致。
13.根据该方面,能够容易地确定车辆的行驶历史是否相互一致。
14.在以上方面中,优选地,当指示所述行驶历史的点的密度等于或大于规定阈值时,所述地图服务器确定在所述转弯信号操作后所述车辆的行驶历史是相互一致的。
15.根据该方面,能够容易地确定车辆的行驶历史是否相互一致。
16.在以上方面中,优选地,所述至少一个车辆包括多个车辆,所述外部环境传感器包括成像装置,所述成像装置配置成捕获每个所述车辆周围的图像,并且所述地图服务器配置成基于由所述成像装置捕获的每个所述车辆的图像,获取每个所述车辆在所述转弯信号操作后行驶的道路的道路信息,并基于所述道路信息更新所述高精度地图。
17.根据该方面,在转弯信号操作之后的道路信息是基于由成像装置获取的图像而获取的。因此,能够适当地获取关于要添加到高精度地图中的分支路线的信息。
18.在以上方面中,优选地,所述外部环境传感器配置成获取所述车辆行驶的路面上的路面信息,所述控制器配置成将由所述外部环境传感器获取的路面信息与对应于所述路面信息并由所述自车位置识别装置识别的位置一起传输,并且所述地图服务器配置成将从所述控制器接收的所述路面信息添加到所述高精度地图。
19.根据该方面,关于路面状态的信息被添加到高精度地图。因此,能够基于路面状态使车辆更安全地行驶。
20.在以上方面中,优选地,所述地图信息系统进一步包括:加速度传感器8a,所述加速度传感器配置成获取所述车辆的加速度和/或减速度;以及转向角传感器13b,所述转向角传感器配置成获取转向角,其中,所述控制器配置成从所述地图服务器获取所述高精度地图,从所述高精度地图提取所述车辆行驶的道路的形状,并且当由所述加速度传感器获取的所述加速度和/或减速度或由所述转向角传感器获取的所述转向角与所述道路的所提取的形状不一致时,将所述不一致通知给所述地图服务器。
21.根据该方面,在加速度和/或减速度以及转向角中的一者不在道路形状的预期范围内的情况下,即在出现偏离的情况下,能够提示地图服务器更快速更新高精度地图。
22.因此,根据以上方面,能够提供这样一种地图信息系统,该地图信息系统包括至少一个车辆和地图服务器,该地图服务器配置成与所述车辆通信并存储高精度地图,并且可以获取分支路线信息,并在该分支路线新建立时更新高精度地图。
附图说明
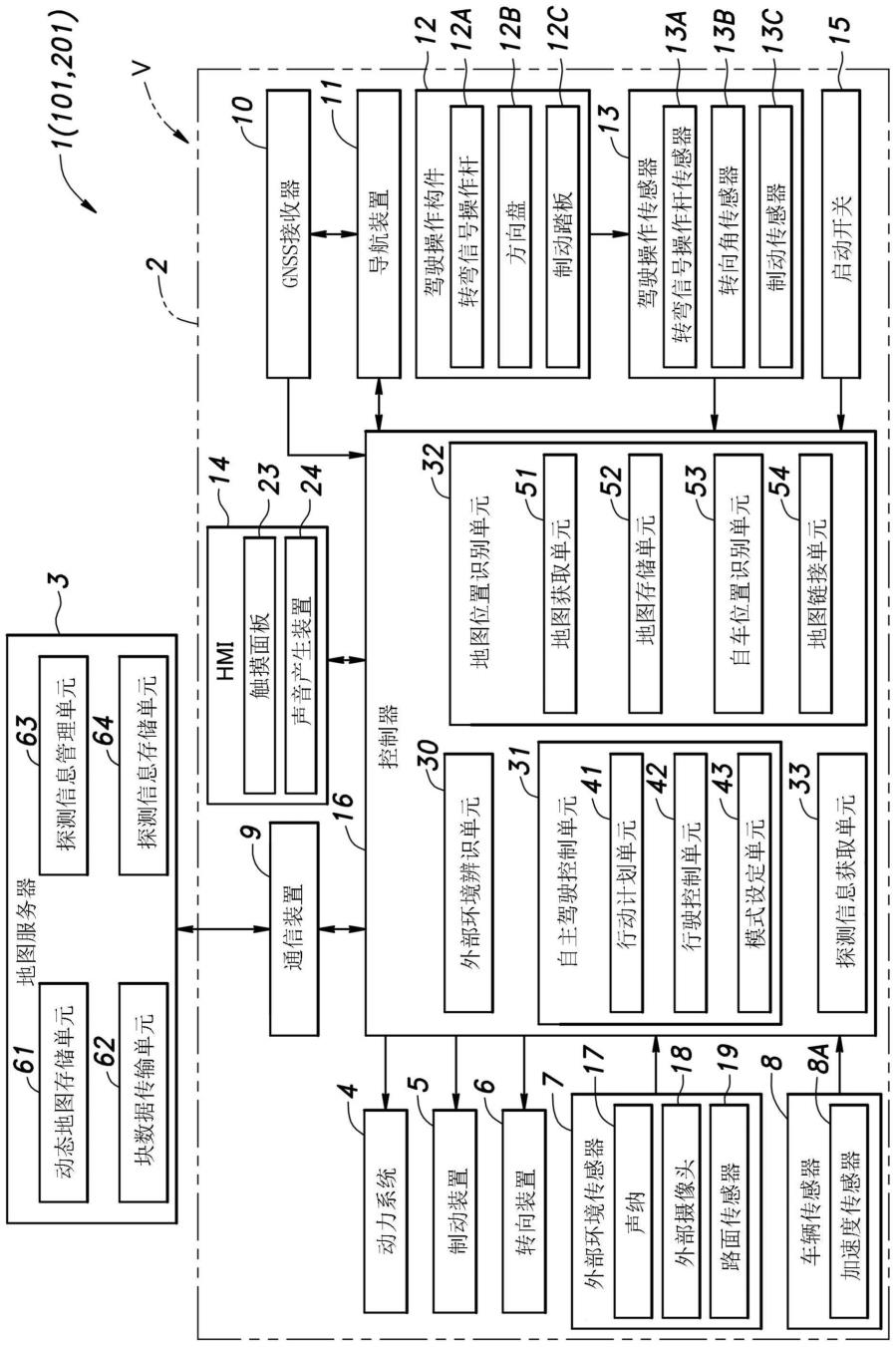
23.图1是示出根据第一实施方式的地图信息系统的配置的功能框图;
24.图2a是用于解释存储在导航装置中的地图的说明图;
25.图2b是用于解释高精度地图的数据的说明图;
26.图3是用于解释在车辆自主行驶的情况下由地图信息系统执行的操作的顺序图;
27.图4是用于解释在车辆根据驾驶员的驾驶操作行驶的情况下由地图信息系统执行的操作的顺序图;
28.图5是分支路线添加处理的流程图;
29.图6a是转弯信号信息表的实施例;
30.图6b是示出车辆的行驶历史的示意图;
31.图7a是确定表的一个实施例;以及
32.图7b是用于解释绘制有指示行驶历史的点的地图的示意图。
具体实施方式
33.在下文中,将参照附图描述根据本发明的一个实施方式的地图信息系统1。
34.《《第一实施方式》》
35.如图1中所示,地图信息系统1包括安装在车辆(见图1中的“v”)上的车辆系统2以及经由网络连接到车辆系统2的地图服务器3。
36.《车辆系统》
37.首先,将描述车辆系统2。车辆系统2包括动力系统4、制动装置5、转向装置6、外部环境传感器7、车辆传感器8、通信装置9、gnss接收器10、导航装置11、驾驶操作构件12、驾驶操作传感器13、hmi 14、启动开关15以及控制器16。车辆系统2的每个部件均经由诸如控制器区域网络(can)之类的通信手段相互连接,从而使信号可以在它们之间传输。
38.动力系统4是配置成对车辆施加驱动力的装置。例如,动力系统4包括内燃机(如汽油机和柴油机)和电动马达中的至少一者。制动装置5是配置成向车辆施加制动力的装置。例如,制动装置5包括:配置成将衬块压在制动转子上的制动钳;以及配置成向制动钳供应油压的电动缸。制动装置5可以进一步包括驻车制动装置,该驻车制动装置配置成经由缆线限制车轮旋转。转向装置6是配置成改变车轮的转向角的装置。例如,转向装置6包括:配置成使车轮转向的齿条-小齿轮机构;以及配置成驱动齿条-小齿轮机构的电动马达。动力系统4、制动装置5和转向装置6由控制器16控制。
39.外部环境传感器7是配置成通过捕获来自车辆周围环境的电磁波、声波等来检测车辆外部的物体等的传感器。外部环境传感器7包括多个声纳17和多个外部摄像头18。外部环境传感器7可以进一步包括毫米波雷达和/或激光雷达。外部环境传感器7配置成向控制
器16输出检测结果。
40.每个声纳17均由所谓的超声波传感器构成。声纳17向车辆的周围环境发射超声波并捕获其反射波,从而检测物体的位置(距离和方向)。多个声纳17分别设置在车辆的后部和前部。
41.每个外部摄像头18均是配置成捕获车辆的周围环境的图像的装置。例如,外部摄像头18是使用诸如ccd和cmos之类的固体成像元件的数字摄像头。外部摄像头18可以由立体摄像头或单眼摄像头构成。多个外部摄像头18包括:前部摄像头,其配置成捕获车辆前面的图像;后部摄像头,其配置成捕获车辆后面的图像;以及一对侧部摄像头,其配置成捕获车辆的两个横向侧的图像。
42.车辆传感器8是配置成检测车辆状态的传感器。车辆传感器8包括:车辆速度传感器,其配置成检测车辆的速度;加速度传感器8a,其配置成检测车辆的前后加速度和横向加速度;横摆率传感器,其配置成检测绕车辆的横摆轴线的角速度;方向传感器,其配置成检测车辆的方向;等等。例如,横摆率传感器可以包括陀螺仪传感器。车辆传感器8可以进一步包括:倾斜度传感器,其配置成检测车身的倾斜度;以及车轮速度传感器,其配置成检测每个车轮的旋转速度。
43.在本实施方式中,车辆传感器8包括6轴惯性测量单元(imu),该imu配置成检测前后加速度、横向加速度、竖向加速度、侧倾率(绕侧倾轴线的角速度)、纵倾率(绕纵倾轴线的角速度)以及横摆率(绕横摆轴线的角速度)。
44.通信装置9配置成调解控制器16和车辆外的装置(例如,地图服务器3)之间的通信。通信装置9包括路由器,该路由器配置成将控制器16连接到互联网。通信装置9可以具有调解控制器16(即,自车的控制器16)与周围车辆的控制器之间以及控制器16与道路上的路边装置之间的无线通信功能。
45.gnss接收器10(自车位置识别装置)配置成接收来自构成全球导航卫星系统(gnss)的各定位卫星的信号(下文中称为“gnss信号”)。gnss接收器10配置成将接收的gnss信号输出到导航装置11和控制器16。
46.导航装置11由设置有公知硬件的计算机组成。导航装置11配置成基于车辆以前的行驶历史和从gnss接收器10输出的gnss信号来识别车辆的当前位置(经度和纬度)。导航装置11配置成存储关于车辆正在行驶的区域或国家的道路的数据(下文中称为“导航地图数据”)。导航装置11配置成将导航地图数据存储在ram、hdd、ssd等中。
47.导航装置11配置成基于gnss信号和导航地图数据设定从车辆的当前位置到乘员输入的目的地的路线,并将该路线输出到控制器16。当车辆开始行驶时,导航装置11向乘员提供到目的地的路线指导。
48.如图2a中所示,导航装置11配置成存储关于布置在每条道路上的点(节点:见图2a中的黑色圆圈)以及连接节点的线段(链接)的信息作为地图上的道路信息。
49.例如,可以在诸如交叉点或汇流点之类的特征点处设置存储在导航装置11中的每个节点。导航装置11配置成存储与由链接连接的节点之间的距离关联的每个链接。导航装置11配置成基于节点之间的距离获取从车辆的当前位置到目的地的适当路线,并向控制器16输出指示该路线的信息。指示该路线的输出信息包括对应于该路线的道路上的点(节点)以及对应于连接这些节点的矢量的链接。
50.驾驶操作构件12设置在车厢内,并配置成接受乘员进行的输入操作以控制车辆。驾驶操作构件12包括转弯信号操作杆12a、方向盘12b、加速踏板以及制动踏板12c。驾驶操作构件12可以进一步包括换挡杆、驻车制动杆等。
51.驾驶操作传感器13是配置成检测驾驶操作构件12的操作量的传感器。驾驶操作传感器13包括:转弯信号操作杆传感器13a,其配置成检测乘员对转弯信号操作杆12a的输入操作;转向角传感器13b,其配置成检测方向盘12b的操作量;加速传感器,其配置成检测加速踏板的操作量;以及制动传感器13c,其配置成检测制动踏板12c的操作量。驾驶操作传感器13配置成向控制器16输出所检测的操作量。转弯信号操作杆传感器13a配置成检测对转弯信号操作杆12a的操作输入(输入操作)以及与操作输入相对应的指示方向。驾驶操作传感器13可以进一步包括抓握传感器,其配置成检测乘员抓握方向盘12b的情况。例如,抓握传感器包括设置在方向盘12b的外周部分上的至少一个电容传感器。
52.hmi 14配置成通过显示和/或语音通知乘员各种信息,并接受乘员的输入操作。例如,hmi 14包括触摸面板23和声音发生装置24。触摸面板23包括液晶显示器、有机el显示器等,并配置成接受乘员的输入操作。声音发生装置24由蜂鸣器和/或扬声器构成。hmi 14配置成在触摸面板23上显示驾驶模式切换按钮。驾驶模式切换按钮配置成接受乘员对车辆的驾驶模式(例如,自主驾驶模式和手动驾驶模式)的切换操作。
53.hmi 14也作为接口调解对导航装置11的输入/来自导航装置11的输出。即,当hmi 14接受乘员对目的地的输入操作时,导航装置11开始设定到目的地的路线。此外,当导航装置11提供到目的地的路线指导时,hmi 14显示车辆的当前位置和到目的地的路线。
54.启动开关15是用于启动车辆系统2的开关。即,乘员在坐在驾驶座上并踩下制动踏板12c时按下启动开关15,从而启动车辆系统2。
55.控制器16由至少一个电子控制单元(ecu)构成,该ecu包括cpu、rom、ram等。cpu根据程序执行操作处理,因此控制器16执行各种类型的车辆控制。控制器16可以由一个硬件构成,或者可以由包括多个硬件的单元构成。控制器16的功能可以至少部分由诸如lsi、asic和fpga之类的硬件执行,或者可以由软件和硬件的组合执行。
56.《控制器》
57.如图1中所示,控制器16包括外部环境辨识单元30、自主驾驶控制单元31(adas:高级驾驶辅助系统)、地图位置识别单元32(mpu:地图定位单元)以及探测信息获取单元33。这些部件可以由独立的电子控制单元组成,并经由网关(中央网关:cgw)相互连接。另选地,这些部件可以由集成的电子控制单元组成。
58.外部环境辨识单元30配置成基于外部环境传感器7的检测结果辨识存在于车辆的周围环境中的物体,并因此获取关于该物体的位置和尺寸的信息。由外部环境辨识单元30辨识的物体包括存在于车辆的行驶路线上的分界线、车道、路端、路肩和障碍物。
59.每条分界线均是沿车辆行驶方向示出的一条线。每条车道均是由一条或多条分界线界定的区域。每个路端均是道路的端部。每个路肩均是布置在车辆宽度方向上的端部的分界线与路端之间的区域。例如,每个障碍物均可以是障碍物(护栏)、电线杆、周围车辆、行人等。
60.外部环境辨识单元30配置成通过分析由每个外部摄像头18捕获的图像来辨识车辆周围的物体相对于车辆的位置。例如,外部环境辨识单元30可以通过使用诸如三角测量
法或运动立体法的公知方法来辨识在车身周围的俯视图中从车辆到物体的距离和方向。此外,外部环境辨识单元30配置成分析由外部摄像头18捕获的图像,并基于公知方法确定每个物体的类型(例如,分界线、车道、路端、路肩、障碍物等)。
61.自主驾驶控制单元31包括行动计划单元41、行驶控制单元42和模式设定单元43。
62.行动计划单元41配置成创建用于使车辆行驶的行动计划。行动计划单元41配置成向行驶控制单元42输出与所创建的行动计划相对应的行驶控制信号。
63.行驶控制单元42配置成基于来自行动计划单元41的行驶控制信号来控制动力系统4、制动装置5和转向装置6。即,行驶控制单元42配置成根据由行动计划单元41创建的行动计划使车辆行驶。
64.模式设定单元43配置成基于对hmi 14的输入操作(切换操作)在手动驾驶模式与自主驾驶模式之间切换车辆的驾驶模式。在手动驾驶模式下,行驶控制单元42响应乘员对驾驶操作构件12(例如,方向盘12b、加速踏板和/或制动踏板12c)的输入操作来控制动力系统4、制动装置5和转向装置6,从而使车辆行驶。另一方面,在自主驾驶模式下,乘员不需要对驾驶操作构件12进行输入操作,并且行驶控制单元42控制动力系统4、制动装置5和转向装置6,从而使车辆自主行驶。即,自主驾驶模式的自动驾驶水平高于手动驾驶模式的自动驾驶水平。
65.地图位置识别单元32包括地图获取单元51、地图存储单元52、自车位置识别单元53和地图链接单元54。
66.地图获取单元51配置成访问地图服务器3并从地图服务器3获取动态地图数据,该动态地图数据是高精度地图信息。例如,当导航装置11设定路线时,地图获取单元51经由通信装置9从地图服务器3获取对应于该路线的区域的最新动态地图数据。
67.动态地图数据比存储在导航装置11中的导航地图数据更详细,并且包括静态信息、半静态信息、半动态信息和动态信息。静态信息包括3d地图数据,该3d地图数据比导航地图数据更精确。半静态信息包括交通管制信息、道路施工信息和广域天气信息。半动态信息包括事故信息、交通拥堵信息和小区域天气信息。动态信息包括信号信息、周围车辆信息和行人信息。
68.如图2b中所示,动态地图数据的静态信息(高精度地图)包括行驶路线上的车道的信息(例如,车道数量)以及行驶路线上的每条分界线的信息(例如,分界线的类型)。例如,静态信息的分界线表示为以比导航地图数据的节点更小的间隔布置的节点(见图2b中的白色圆圈)以及连接这些节点的链接。
69.此外,静态信息的每个车行道也均表示为以规定间隔布置的节点(下文中称为“车行道节点”:见图2b中的黑色圆圈)以及连接这些节点(车行道节点)的链接(下文中称为“车行道链接”)。每个车行道节点均设置在道路左边缘上设定的分界线的每个节点与道路右边缘上设定的分界线的每个节点之间的中间点处。车行道节点沿着道路以规定间隔设置。
70.高精度地图(静态信息)进一步包括关于路肩边缘的信息。每个路肩边缘均是车辆行驶的车行道的端部。当设置有车行道和人行道时,路肩边缘是指它们之间的边界。静态信息的路肩边缘表示为沿路肩边缘布置的节点(见图2b中的白色方块:下文中称为“路肩边缘节点”),这些节点的间隔与分界线的节点以及连接节点(路肩节点)的链接(下文中称为“路肩边缘链接”)的间隔大致相同。
71.地图存储单元52包括诸如hdd和ssd之类的存储单元。地图存储单元52配置成存储用于使车辆在自主驾驶模式下自主行驶的各种信息。地图存储单元52配置成存储由地图获取单元51从地图服务器3获取的动态地图数据。
72.自车位置识别单元53配置成识别车辆的位置(纬度和经度),即识别基于由gnss接收器10接收的gnss信号的自车位置。
73.自车位置识别单元53配置成基于车辆传感器8(imu等)的检测结果,通过使用航位推算法(例如,测距法)来计算车辆的移动量(移动距离和移动方向:下文中称为“dr移动量”)。例如,自车位置识别单元53配置成在无法接收gnss信号时基于dr移动量识别自车位置。此外,自车位置识别单元53可以通过基于dr移动量校正根据gnss信号识别的自车位置来进行改善自车位置的识别精度的处理。
74.地图链接单元54配置成基于从导航装置11输出的路线,提取存储在地图存储单元52中的高精度地图上的相应路线。
75.当车辆被给出开始自主行驶的指令时,行动计划单元41基于由地图链接单元54提取的路线创建全局行动计划(例如,改变车道、汇流、分支等)。之后,当车辆开始自主行驶时,行动计划单元41基于全局行动计划、由自车位置识别单元53识别的自车位置、由外部环境辨识单元30辨识的物体、存储在地图存储单元52中的高精度地图等,创建更详细的行动计划(例如,用于避开危险等的行动计划)。行驶控制单元42基于创建的详细行动计划控制车辆的行驶。
76.探测信息获取单元33将由自车位置识别单元53基于gnss信号识别的自车位置与由外部环境传感器7、车辆传感器8和驾驶操作传感器13中的至少一者检测到的数据关联,从而获取并存储自车位置和数据作为探测信息。
77.更具体地说,当转弯信号操作杆传感器13a检测到对转弯信号操作杆12a的操作输入时,探测信息获取单元33将自车位置(经度和纬度)与对应于对转弯信号操作杆12a的操作输入的车辆行驶方向关联,从而获取并存储车辆的自车位置和行驶方向作为探测信息,所述自车位置是由转弯信号操作杆传感器13a检测到操作输入时基于gnss信号识别的。
78.在本实施方式中,当转弯信号操作杆传感器13a检测到对转弯信号操作杆12a的操作输入(下文中称为“转弯信号操作”)时,探测信息获取单元33获取并存储进行转弯信号操作时车辆的位置(经度和纬度)、与转弯信号操作相对应的指示方向(即车辆的行驶方向)以及在检测转弯信号操作的规定时段内自车位置的历史(下文中称为“行驶历史”),该历史是基于gnss信号识别的。在本实施方式中,行驶历史由一组点表示,这一组点指示在检测转弯信号操作的规定时段内每单位时间车辆的位置。同时,探测信息获取单元33获取并存储关于由外部环境传感器7检测到的车辆周围环境的信息(在本实施方式中,由外部摄像头18捕获的车辆前方的图像的视频)。
79.下文中,进行转弯信号操作的位置、转弯信号操作后的车辆行驶历史、转弯信号操作对应的指示方向(车辆的行驶方向)以及关于相应的转弯信号操作后由外部环境传感器7(外部摄像头18)获取(检测)的车辆的周围环境信息将被称为“转弯信号信息”。
80.探测信息获取单元33将获取的探测信息适当地传输给地图服务器3。
81.《地图服务器》
82.接着,将描述地图服务器3。如图1中所示,地图服务器3经由网络(在本实施方式中
为互联网)与控制器16连接。地图服务器3是包括cpu、rom、ram和存储单元(如hdd和ssd)的计算机。
83.动态地图数据存储在地图服务器3的存储单元中。存储在地图服务器3的存储单元中的动态地图数据比存储在控制器16的地图存储单元52中的动态地图数据覆盖更广的区域。动态地图数据包括对应于地图上每个区域的多个块数据(部分地图数据)。优选地,每个块数据均对应于地图上沿纬度方向和经度方向划分的矩形区域。
84.在经由通信装置9接收到来自控制器16(地图获取单元51)的数据请求后,地图服务器3将与请求的数据相对应的动态地图(动态地图数据)传输到相应的控制器16。传输的数据(动态地图数据)可以包括交通拥堵信息、天气信息等。
85.如图1中所示,地图服务器3包括动态地图存储单元61、块数据传输单元62、探测信息管理单元63以及探测信息存储单元64。
86.动态地图存储单元61由存储单元组成,并配置成存储比车辆行驶的区域更广的区域中的动态地图。块数据传输单元62配置成接受来自车辆的对特定块数据的传输请求,并将对应于传输请求的块数据传输给车辆。
87.探测信息管理单元63配置成接收从车辆适当传输的探测信息。探测信息存储单元64配置成存储(保存)由探测信息管理单元63获取(接收)的探测信息。探测信息管理单元63基于存储在探测信息存储单元64中的探测信息适当地执行统计处理等,从而执行更新动态地图的更新处理。
88.接着,将描述车辆系统2的操作。当乘员登上车辆并按压启动开关15同时踩踏制动踏板12c时,车辆系统2被启动。之后,当乘员输入目的地并向hmi 14输入以开始自主行驶时,车辆自主行驶并到达目的地。图3示出了从车辆启动到到达目的地的顺序图。下文中,将参照图3描述车辆自主行驶并到达目的地时,由自主行驶控制单元31、地图位置识别单元32、探测信息获取单元33和地图服务器3执行的处理(操作)概要。
89.当按压启动开关15并且车辆系统2启动时,导航装置11和地图位置识别单元32各自基于来自卫星的gnss信号识别自车位置。
90.之后,当乘员向hmi 14输入目的地时,导航装置11基于导航地图数据搜索并确定从当前位置到目的地的路线。
91.在确定路线后,导航装置11将确定的路线输出到地图位置识别单元32。地图位置识别单元32请求地图服务器3基于获取的路线传输相应的块数据。
92.在接收到来自地图位置识别单元32的请求(块数据请求)后,地图服务器3基于车辆的位置以及由导航装置11设定(确定)的路线生成相应的块数据,并将生成的块数据传输给地图位置识别单元32(车辆系统2)。
93.在接收到该块数据时,地图位置识别单元32从该块数据获取(提取)与车辆周围的动态地图有关的数据。之后,地图位置识别单元32(地图链接单元54)执行地图链接处理,并向自主驾驶控制单元31输出高精度地图上的路线,该路线对应于由导航装置11设定(确定)的从出发点到目的地的块数据中的路线。之后,自主驾驶控制单元31(行动计划单元41)根据高精度地图上的路线创建全局行动计划。
94.当在hmi 14上作出指示车辆自主行驶的输入时,地图位置识别单元32识别自车位置,并且自主驾驶控制单元31基于识别的自车位置、由外部环境辨识单元30辨识的物体位
置等依次创建更详细的行动计划。自主驾驶控制单元31(行驶控制单元42)根据创建的行动计划控制车辆,从而使车辆自主行驶。
95.当车辆开始行驶时,探测信息获取单元33开始获取探测信息。当车辆正在行驶时,探测信息获取单元33适当地将获取的探测信息作为自主驾驶期间的探测信息传输到地图服务器3。在接收到自主驾驶期间的探测信息时,地图服务器3将接收到的探测信息作为自主驾驶期间的探测信息进行存储(保存),并基于自主驾驶期间的探测信息适当地更新动态地图。
96.当车辆到达目的地时,自主驾驶控制单元31执行停止车辆的停止处理,并且hmi14显示车辆到达目的地的通知。
97.如图4中所示,在车辆系统2启动后,当驾驶员向hmi 14作出进行(启动)驾驶操作的输入时,车辆根据驾驶员的驾驶操作行驶。
98.当车辆根据驾驶员的驾驶操作行驶时,执行与以上类似的处理。即,当目的地被输入到导航装置11时,地图位置识别单元32基于获取的路线从地图服务器3接收相应的块数据,并获取与动态地图有关的数据。当车辆根据驾驶员的驾驶操作开始行驶时,探测信息获取单元33开始获取探测信息。当车辆行驶时,探测信息获取单元33适当地将获取的探测信息作为手动驾驶期间的探测信息传输到地图服务器3。
99.例如,当驾驶员在转弯信号操作杆12a上进行转弯信号操作时,转弯信号操作杆传感器13a检测其操作输入。当转弯信号操作杆传感器13a检测到操作输入时,探测信息获取单元33获取转弯信号信息,并将转弯信号信息作为探测信息传输到地图服务器3。
100.在手动驾驶期间获取探测信息时,地图服务器3将获取的探测信息作为手动驾驶期间的探测信息存储(保存),并基于手动驾驶期间的探测信息适当地执行更新处理,从而更新动态地图。
101.通过这种方式,地图服务器3基于来自车辆的探测信息更新高精度地图。即,基于来自车辆的探测信息更新高精度地图的地图信息系统1由车辆和地图服务器3组成,该地图服务器3存储高精度地图并配置成与车辆通信。
102.接着,将描述由地图信息系统1中的地图服务器3(更具体地说,探测信息管理单元63)执行的更新处理。该更新处理是基于手动驾驶期间的探测信息更新高精度地图(动态地图)的处理。
103.更新处理包括例如:增加高精度地图上不存在的分支路线的处理;删除高精度地图上的行车道的处理;向高精度地图添加和更新路面信息的处理等。例如,在通过施工等将分支路线添加到高速公路等时执行增加高精度地图上不存在的分支路线的处理。例如,当通过施工等删除高速公路等的部分行车道时,执行用于删除行车道的处理。例如,执行将路面信息添加到高精度地图的处理以获取指数,将该指数添加到动态地图数据,并在自主行驶的车辆的行为控制中反应该指数。例如,以上指数包括:用于车辆传感器8以基于车辆行为指示路面质量的指数(例如,摩擦系数等);指示根据道路的形状估计的车辆速度与实际车辆速度之间的差异的指数;指示根据道路的形状估计的转向角与实际转向角之间的差异的指数等。
104.下文中,将参照图5描述分支路线添加处理的细节。在分支路线添加处理中,探测信息管理单元63基于从高速公路上行驶的车辆等传输到地图服务器3并存储在探测信息存
储单元64中的多条探测信息,将分支路线添加到高精度地图。
105.在分支路线添加处理的第一步骤st1中,探测信息管理单元63获取转弯信号操作后获取的多条探测信息,即来自从多个车辆传输的探测信息的多条转弯信号信息。每条转弯信号信息包括进行转弯信号操作的位置(经度和纬度)、转弯信号操作后车辆的行驶历史、与转弯信号操作相对应的指示方向(即,车辆的行驶方向)以及转弯信号操作后由外部环境传感器7获取的车辆周围环境信息。
106.之后,探测信息管理单元63生成id(下文中称为“转弯信号id”)被添加至每一条转弯信号信息的一组数据,并将这一组数据写入存储在探测信息存储单元64中的转弯信号信息表t1,从而生成转弯信号信息表t1。当这种写入完成后,探测信息管理单元63执行步骤st2。
107.在步骤st2中,探测信息管理单元63关于记录在转弯信号信息表t1中的每一条转弯信号信息,确定高精度地图中记录(存储)的道路上是否存在车辆在转弯信号操作后的行驶历史。在本实施方式中,探测信息管理单元63可以通过确定在高精度地图中记录的路肩边缘链接之间是否存在指示转弯信号操作后车辆的行驶历史的点组来确定高精度地图中记录的道路上是否存在转弯信号操作后车辆的行驶历史。之后,探测信息管理单元63从转弯信号信息表t1中只提取在高精度地图中记录的道路上不存在转弯信号操作后的车辆行驶历史的一组数据,并将这一组数据记录在确定表t2中,从而生成确定表t2。当确定表t2的生成(这一组数据的记录)完成后,探测信息管理单元63执行步骤st3。
108.在步骤st3中,探测信息管理单元63基于确定表t2中记录的多个车辆在转弯信号操作之后的行驶历史,确定是否存在新添加的分支路线。更具体地说,探测信息管理单元63对车辆在转弯信号操作后的行驶历史执行统计处理,并确定车辆在转弯信号操作后的行驶历史是否相互一致。在许多车辆具有相似的行驶历史,因而车辆在转弯信号操作后的行驶历史相互一致的情况下,探测信息管理单元63确定存在添加的分支路线(确定需要更新高精度地图)。
109.在本实施方式中,探测信息管理单元63在地图上绘制指示记录在确定表t2中的车辆的行驶历史的点,将地图划分为网格区域,并计算每个网格区域中的点的密度。在地图中存在指示行驶历史的点的密度等于或大于规定值的情况下,探测信息管理单元63估计车辆在转弯信号操作后的行驶历史是相互一致的,从而确定存在添加的分支路线。探测信息管理单元63(地图服务器3)在确定存在添加的分支路线时执行步骤st4,而在确定不存在添加的分支路线时结束分支路线添加处理。
110.在步骤st4中,探测信息管理单元63基于车辆在确定表t2中记录的转弯信号操作后的行驶历史,提取估计在添加的分支路线上行驶的车辆的周围环境信息。更具体地说,在指示车辆的行驶历史的任何一个点存在于地图上指示行驶历史的点的密度等于或大于规定值的区域的情况下,探测信息管理单元63确定以上车辆已在添加的分支路线上行驶,并获取相应的周围环境信息作为在分支路线上行驶的车辆的周围环境信息。之后,探测信息管理单元63基于在分支路线上行驶的车辆的周围环境信息,获取道路信息,该道路信息包括车辆在转弯信号操作后所行驶的道路的路端、形状、中心线等的信息。在获取道路信息后,探测信息管理单元63基于获取的道路信息向高精度地图添加关于分支路线的车道、分界线等的信息,从而更新高精度地图。当高精度地图的更新完成时,探测信息管理单元63完
成分支路线添加处理。
111.接着,将描述以这种方式配置的地图信息系统1的操作。
112.探测信息管理单元63从探测信息中提取指示已经进行了转弯信号操作的数据,并生成转弯信号信息表t1(步骤st1)。如图6a中所示,在转弯信号信息表t1中记录转弯信号id、已进行转弯信号操作的位置(操作点)、与转弯信号操作相对应的车辆的行驶方向(指示方向)、车辆转弯信号操作后的行驶历史以及相应转弯信号操作后由外部环境传感器7获取的车辆周围环境的信息(周围环境信息)。
113.在本实施方式中,车辆的周围环境信息被记录为由获取车辆前方图像的外部摄像头18(成像装置)捕获的视频。如图6a中所示,指示捕获的视频的文件名被写入转弯信号信息表t1中。
114.在步骤st2中,探测信息管理单元63通过确定在高精度地图中记录的路肩边缘链接之间是否存在指示转弯信号操作后车辆的行驶历史的点组中所包括的所有点,确定在高精度地图中记录的道路上是否存在转弯信号操作后的车辆行驶记录。
115.例如,在图6b中,指示转弯信号操作后车辆的行驶历史的点组p1至p4中所包括的点p2至p4不存在于路肩边缘链接l
l
和lr之间。因此,探测信息管理单元63确定在高精度地图上记录的道路上不存在具有转弯信号id“0001”的行驶历史,并在确定表t2中记录具有转弯信号id“0001”的转弯信号信息(步骤st2:见图7a)。
116.接着,如图7b中所示,探测信息管理单元63在地图上绘制指示确定表t2中记录的车辆行驶历史的点。
117.当添加分支路线时,在分支路线上行驶的车辆的行驶历史沿着分支路线延续,并且相互一致。因此,如图7b中所示,指示车辆行驶历史的许多点存在于沿分支路线的区域中(见图7b中的虚线),因此沿分支路线的区域中的点的密度增大(见图7b中由粗线包围的区域)。
118.探测信息管理单元63将其上绘制有指示车辆行驶历史的点的地图划分为网格区域,并确定是否存在其中的点的密度等于或大于规定值的网格区域。因此,探测信息管理单元63确定车辆在转弯信号操作后的行驶历史是否相互一致,并由此获取添加的分支路线的存在/不存在(步骤st3)。
119.在存在添加的分支路线的情况下,探测信息管理单元63基于由外部摄像头18捕获的视频(图像),从包括高密度点的区域中的行驶历史的转弯信号信息(探测信息)中获取与车辆在转弯信号操作后行驶的道路有关的道路信息(例如,路端等:见图7b中的虚线)。探测信息管理单元63基于道路信息更新高精度地图。
120.接着,将描述以这种方式配置的地图信息系统1的效果。
121.地图服务器3可以简单地提取行驶历史在高精度地图上的道路上不存在的数据,并更新高精度地图,而不提取指示乘员已进行转弯信号操作的数据。然而,如果采用这样的更新方法,在不能正确识别自车位置的情况下,高精度地图可能被错误地更新。
122.另一方面,在本实施方式中,探测信息管理单元63从探测信息中提取指示乘员进行了转弯信号操作的数据(步骤st1),并进一步从提取的数据中提取行驶历史不存在于高精度地图上的道路的数据,从而更新高精度地图(步骤st4)。因此,可以基于乘员已经确认道路的存在并进行了转弯信号操作的情况下的数据更新高精度地图。因此,能够防止高精
度地图被错误地更新,从而更精确地确定新建立的分支路线,这样可以提高高精度地图的精确性。此外,通过在已进行转弯信号操作的情况下提取探测信息,能够更快检测到新建立的分支路线。因此,可以提高高精度地图的更新速度,从而可以提高高精度地图的精确性。
123.另外,探测信息管理单元63通过确定地图上的密度是否等于或大于规定阈值(规定值)来确定车辆在转弯信号操作后的行驶历史是否相互一致,并获取添加的分支路线的存在/不存在(步骤st3)。以这种方式,探测信息管理单元63通过基于来自多个车辆的探测信息确定车辆的行驶历史是否一致,从而确定是否需要更新高精度地图。因此,能够防止探测信息管理单元63基于不正确的信息更新高精度地图,从而可以提高高精度地图的精确性。
124.探测信息管理单元63绘制指示车辆在转弯信号操作后的行驶历史的点,并且当点的密度等于或大于规定阈值时,确定车辆在转弯信号操作后的行驶历史是相互一致的。以这种方式,通过在地图上绘制指示行驶历史的点并使用其密度,与将探测信息的行驶历史相互比较的情况相比,能够容易地确定车辆在转弯信号操作后的行驶历史是否相互一致。
125.此外,道路信息的获取和高精度地图的更新是基于在添加的分支路线上行驶的车辆上安装的外部摄像头18所获取的视频(图像)。因此,没有必要为了更新高精度地图而使测量用的车辆单独行驶,从而可以适当且容易地获取关于要添加到高精度地图的分支路线的信息。
126.《《第二实施方式》》
127.根据第二实施方式的地图信息系统101与根据第一实施方式的地图信息系统1的不同之处在于,外部环境传感器7包括配置成获取路面信息(例如,摩擦系数、作为路面上的隆起部分的凸起的存在/不存在等;下文中称为“路面信息”)的路面传感器19,并且地图服务器3和控制器16基于路面信息执行处理。关于其他配置,第二实施方式与第一实施方式基本相同,因此将省略对其他配置的描述。
128.在车辆正在自主行驶或根据乘员(驾驶员)的驾驶操作行驶时,探测信息获取单元33从路面传感器19获取车辆正行驶的路面的路面信息。控制器16将获取的路面信息和由自车位置识别单元53识别的相应位置作为探测信息传输给地图服务器3。
129.探测信息存储单元64存储从控制器16接收到的路面信息。探测信息管理单元63将存储在探测信息存储单元64中的路面信息作为每条车道链接(每条车道的链接)的属性添加到高精度地图。此时,探测信息存储单元64可以在对多条路面信息执行统计处理后(例如,在获取平均数或模式后),将从控制器16接收的多条路面信息添加到高精度地图。此外,当路面信息已经添加到高精度地图时,探测信息存储单元64可以基于获取的路面信息适当地更新添加的路面信息。
130.当车辆自主行驶时,控制器16基于作为每条车道链接的属性添加的路面信息来执行车辆控制。更具体地说,在基于路面信息确定车辆正在或将要在路面的摩擦系数较小的区域内行驶时,行动计划单元41可以使行驶控制单元42控制车辆,以防止车辆打滑。此外,在基于路面信息确定车辆正在或将要在存在凸起的路面上行驶时,行动计划单元41可以使行驶控制单元42控制车辆,以使车辆减速。此外,行动计划单元41可以基于路面信息适当地选择车辆应当行驶的车道(例如,推荐车辆行驶的推荐车道)。
131.接着,将描述根据第二实施方式的地图信息系统101的效果。当车辆自主行驶时,
控制器16基于作为每条车道链接的属性添加的路面信息执行车辆控制。因此,可以基于路面信息执行车辆控制。因此,当车辆在存在凸起的路面上行驶时,能够防止车辆打滑并使车辆减速,从而可以提高车辆的安全性和舒适性。
132.《《第三实施方式》》
133.根据第三实施方式的地图信息系统201与根据第一实施方式的地图信息系统1的不同之处在于,探测信息获取单元33在手动驾驶期间从车辆传感器8获取车辆状态信息并从驾驶操作传感器13获取信息,确定这些信息是否与存储在地图存储单元52中的高精度地图信息一致,并且当前者与后者不一致时将探测信息传输到地图服务器3。另外,根据第三实施方式的地图信息系统201与根据第一实施方式的地图信息系统1在获取相应的探测信息时地图服务器3的处理不同。关于其他配置,第三实施方式与第一实施方式基本相同,因此将省略对其他配置的描述。
134.在手动驾驶期间,探测信息获取单元33从车辆传感器8获取车辆状态信息,即车辆行为信息。更具体地说,探测信息获取单元33从配置成检测车辆加速度的加速度传感器8a获取车辆的前后加速度和横向加速度。此外,探测信息获取单元33从驾驶操作传感器13获取信息,更具体地说是从转向角传感器13b获取转向角。接着,探测信息获取单元33从高精度地图中提取车辆行驶的道路的形状。之后,探测信息获取单元33通过确定车辆的前后加速度、横向加速度和转向角中的任何一者是否在从提取的道路形状估计的范围内,来确定车辆行为是否偏离提取的道路形状。
135.在手动驾驶期间,在车辆行驶的道路在高精度地图上被记录为直路,并且在车辆行驶时由转向角传感器13b获取的转向角等于或大于规定值的情况下,探测信息获取单元33确定车辆行为偏离了道路形状。此外,在车辆行驶的道路的曲率等于或大于规定值并且前后加速度等于或大于规定值的情况下,探测信息获取单元33确定车辆行为偏离了道路的形状。
136.当车辆行为偏离提取的道路形状时,探测信息获取单元33向地图服务器3传输通知偏离(不一致)的标志信号和包括由外部摄像头18获取的车辆前方的图像视频的车辆周围环境信息作为探测信息。
137.地图服务器3的探测信息存储单元64存储所传输的探测信息。探测信息管理单元63从存储在探测信息存储单元64中的探测信息中优先提取包括指示车辆行为偏离提取的道路形状的标志信号的数据,并基于提取的数据适当地执行统计处理,从而更新高精度地图。
138.接着,将描述根据第三实施方式的地图信息系统201的效果。在加速和/或减速或转向角不在根据道路形状估计的范围内的情况下,即在发生偏离的情况下,传输指示偏离的标志信号。探测信息管理单元63可以基于标志信息(标志信号)更迅速地检测达到不能根据道路形状估计出车辆行为的程度的道路重大变化。即,通过使用指示偏离的标志信号,能够快速通知地图服务器3道路出现了达到不能根据道路形状估计出车辆行为的程度的重大变化,从而提示地图服务器3更快地更新高精度地图。
139.前面已经描述了本发明的具体实施方式,但本发明不应局限于前述实施方式,在本发明的范围内可以进行各种变型和变更。
140.在以上实施方式中,存储在地图服务器3中的高精度地图是基于探测信息获取单
元33获取的探测信息进行更新的。然而,本发明并不限于此实施方式。例如,存储在地图服务器3中的动态地图的半静态信息、半动态信息等可以基于探测信息进行更新。此外,存储在导航装置11中的导航地图数据可以基于探测信息进行更新。
141.在第二实施方式中,路面信息包括由外部环境传感器7获取的摩擦系数以及作为路面上隆起部分的凸起的存在/不存在。然而,本发明并不限于此实施方式。例如,路面信息可以包括关于基于车辆传感器8(更具体地说,imu)检测到的姿态角计算的路面的坡度信息。
142.在以上实施方式中,地图信息系统1由车辆和地图服务器3组成。然而,本发明并不限于此实施方式。地图信息系统可以包括除车辆和地图服务器3之外的其他部件(例如,配置成提供天气信息的服务器、配置成提供各条道路的路面信息的服务器或提供交通拥堵信息的服务器)。
143.在以上实施方式中,高精度地图基于转弯信号操作杆传感器13a检测到的转弯信号操作进行更新。然而,本发明并不限于此实施方式。例如,在探测信息(即,指示在多个车辆中转弯信号操作已被转弯信号操作杆传感器13a检测到并且对制动踏板12c的踩踏已被制动传感器13c检测到)传输到地图服务器3并且地图服务器3确定存在行驶方向与探测信息的转弯信号操作所指示的方向相同的车道,地图服务器3可以确定道路可能因施工、事故等变窄,并更新动态地图的半静态信息(施工信息等)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
