技术特征:
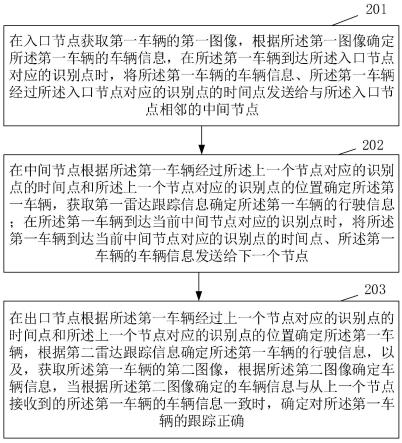
1.一种雷达视觉协同的目标跟踪方法,其特征在于,包括:在入口节点获取第一车辆的第一图像,根据所述第一图像确定所述第一车辆的车辆信息,在所述第一车辆到达所述入口节点对应的识别点时,将所述第一车辆的车辆信息、所述第一车辆经过所述入口节点对应的识别点的时间点发送给与所述入口节点相邻的中间节点;在中间节点根据所述第一车辆经过上一个节点对应的识别点的时间点和所述上一个节点对应的识别点的位置确定所述第一车辆,获取从上一个节点对应的识别点开始对所述第一车辆进行跟踪所得的第一雷达跟踪信息,根据所述第一雷达跟踪信息确定所述第一车辆的行驶信息;在所述第一车辆到达当前中间节点对应的识别点时,将所述第一车辆到达当前中间节点对应的识别点的时间点、所述第一车辆的车辆信息发送给下一个节点;在出口节点根据所述第一车辆经过上一个节点对应的识别点的时间点和所述上一个节点对应的识别点的位置确定所述第一车辆,获取从上一个节点对应的识别点开始对所述第一车辆进行跟踪所得的第二雷达跟踪信息,根据所述第二雷达跟踪信息确定所述第一车辆的行驶信息,以及,获取所述第一车辆的第二图像,根据所述第二图像确定车辆信息,当根据所述第二图像确定的车辆信息与从上一个节点接收到的所述第一车辆的车辆信息一致时,确定对所述第一车辆的跟踪正确,其中,所述入口节点和所述出口节点之间包括至少一个中间节点。2.根据权利要求1所述的雷达视觉协同的目标跟踪方法,其特征在于,所述方法还包括:在所述第一车辆到达当前节点对应的识别点时,将所述第一车辆的车道信息发送给下一个节点;所述在中间节点根据所述第一车辆经过上一个节点对应的识别点的时间点和所述上一个节点对应的识别点的位置确定所述第一车辆包括:在所述中间节点根据所述第一车辆经过上一个节点对应的识别点的时间点、所述第一车辆的车道信息和所述上一个节点对应的识别点的位置确定所述第一车辆。3.根据权利要求1所述的雷达视觉协同的目标跟踪方法,其特征在于,所述方法还包括:在所述中间节点、所述出口节点至少之一缓存雷达跟踪数据;在所述中间节点或出口节点根据所述第一车辆经过所述上一个节点对应的识别点的时间点和所述上一个节点对应的识别点的位置确定所述第一车辆包括:在所述中间节点或出口节点查找缓存的所述雷达跟踪数据,根据所述第一车辆经过所述上一个节点对应的识别点的时间点和所述上一个节点对应的识别点的位置从所述缓存的所述雷达跟踪数据中确定所述第一车辆。4.根据权利要求1所述的雷达视觉协同的目标跟踪方法,其特征在于,所述方法还包括:在所述中间节点上报所述第一车辆的车辆信息和行驶信息至管理平台;在所述出口节点上报所述第一车辆的车辆信息和行驶信息至所述管理平台;以及,确定对所述第一车辆的跟踪正确时,上报对所述第一车辆的跟踪正确信息至所述管理平台;在所述管理平台根据所述跟踪正确的第一车辆的行驶信息对所述第一车辆进行交通行为判定。5.根据权利要求4所述的雷达视觉协同的目标跟踪方法,其特征在于,所述方法还包
括:在所述入口节点为所述第一车辆分配车辆标识,将所述第一车辆的车辆信息、所述第一车辆经过所述入口节点对应的识别点的时间点发送给与所述入口节点相邻的中间节点时,携带分配给所述第一车辆的车辆标识;在所述中间节点或所述出口节点根据所述第一车辆经过所述上一个节点对应的识别点的时间点和所述上一个节点对应的识别点的位置确定所述第一车辆时,继承所述第一车辆的车辆标识,上报所述第一车辆的车辆标识至所述管理平台。6.根据权利要求5所述的雷达视觉协同的目标跟踪方法,其特征在于,所述方法还包括:在所述中间节点检测到第二车辆在第二时间点、第二位置被大车挡住,关联所述第二车辆和所述大车,上报所述第二车辆的车辆信息、所述第二时间点、第二位置、所述大车的标识至所述管理平台;以及,检测到第三车辆从大车后出现时,为所述第三车辆分配车辆标识,记录发现所述第三车辆的第三时间点和第三位置并上报给所述管理平台;对所述第三车辆进行跟踪,记录跟踪到的所述第三车辆的行驶信息,在所述第三车辆到达当前中间节点对应的识别点时,将所述第三车辆到达当前中间节点对应的识别点的时间点、所述第三车辆的车辆信息、所述第三车辆的车辆标识发送给下一个节点;其中,所述大车为尺寸满足预设尺寸要求的车辆;在所述管理平台接收所述出口节点上报的所述第三车辆的行驶信息和车辆信息,所述行驶信息包括时空轨迹,确定所述第三车辆为曾经跟丢的车辆时,获取所述第三车辆的第三时间点和第三位置,查找时空轨迹中存在所述第三时间点和所述第三位置构成的时空位置的目标大车,确定在所述第三时间点前被所述目标大车遮挡过的第一关联车辆,以及,获取所述目标大车遮挡所述第一关联车辆的时间点,称为关联时间点;在所述管理平台将所述第一关联车辆在所述关联时间点之前的时空轨迹,所述目标大车在所述关联时间点至所述第三时间点的时空轨迹,所述第三车辆在所述第三时间点之后的时空轨迹进行拼接得到目标临时轨迹,根据所述第一关联车辆的车辆信息和所述第三车辆的车辆信息是否相同确定所述目标临时轨迹是否正确,且在正确时将所述目标临时轨迹作为所述第三车辆的时空轨迹。7.根据权利要求6所述的雷达视觉协同的目标跟踪方法,其特征在于,所述方法还包括:确定在所述第三时间点前与所述目标大车存在时空交集,且存在关联车辆的其他大车,其中,第i个其他大车与所述目标大车的时空交集时间点为第i交集时间点,第i个其他大车关联的车辆为车辆i,且第i个其他大车遮挡所述车辆i的时间点为第i关联时间点,所述i为1至m,m大于等于1;对第i个其他大车,生成第i临时轨迹,其中:当第i关联时间点早于第i交集时间点时,所述第i临时轨迹为:将所述车辆i在所述第i关联时间点之前的时空轨迹、所述第i其他大车在第i关联时间点至第i交集时间点的时空轨迹、所述目标大车在第i交集时间点至第三时间点的时空轨迹,以及,所述第三车辆在第三时间点之后的时空轨迹进行拼接所得的时空轨迹;当第i关联时间点晚于第i交集时间点时,所述第i临时轨迹为:将所述车辆i在所述第i关联时间点之前的时空轨迹、所述目标大车在第i关联时间点至第三时间点的时空轨迹,以
及,所述第三车辆在第三时间点之后的时空轨迹进行拼接得到的时空轨迹;根据车辆i的车辆信息和所述第三车辆的车辆信息是否相同确定所述第i临时轨迹是否正确,且在正确时将所述第i临时轨迹作为所述第三车辆的时空轨迹。8.根据权利要求1至7任一所述的雷达视觉协同的目标跟踪方法,其特征在于,所述车辆信息包括以下至少之一:车牌号、车辆的特征向量;所述行驶信息包括以下至少之一:轨迹、速度、违法行为。9.一种雷达视觉协同的目标跟踪系统,其特征在于,包括入口节点、出口节点,位于所述入口节点和所述出口节点之间的至少一个中间节点,其中,位于隧道入口的入口节点包括摄像模块、位于隧道内的中间节点包括雷达模块,位于隧道出口的出口节点包括雷达模块和摄像模块,每个节点对应一个识别点,其中:所述入口节点被配置为,获取第一车辆的第一图像,根据所述第一图像确定所述第一车辆的车辆信息,在所述第一车辆到达所述入口节点对应的识别点时,将所述第一车辆的车辆信息、所述第一车辆经过所述入口节点对应的识别点的时间点发送给与所述入口节点相邻的中间节点;所述中间节点被配置为,根据所述第一车辆经过上一个节点对应的识别点的时间和所述上一个节点对应的识别点的位置确定所述第一车辆,获取从上一个节点对应的识别点开始对所述第一车辆进行跟踪所得的第一雷达跟踪信息,根据所述第一雷达跟踪信息确定的所述第一车辆的行驶信息;在所述第一车辆到达当前中间节点对应的识别点时,将所述第一车辆到达当前中间节点对应的识别点的时间点、所述第一车辆的车辆信息发送给下一个节点;所述出口节点被配置为,根据所述第一车辆经过上一个节点对应的识别点的时间点和所述上一个节点对应的识别点的位置确定所述第一车辆,获取从上一个节点对应的识别点开始对所述第一车辆进行跟踪所得的第二雷达跟踪信息,根据所述第二雷达跟踪信息确定所述第一车辆的行驶信息,以及,获取所述第一车辆的第二图像,根据所述第二图像确定车辆信息,当根据所述第二图像确定的车辆信息与从上一个节点接收到的所述第一车辆的车辆信息一致时,确定对所述第一车辆的跟踪正确。10.根据权利要求9所述的目标跟踪系统,其特征在于,所述目标跟踪系统还包括:管理平台,其中:所述中间节点还被配置为,上报所述第一车辆的车辆信息和行驶信息至所述管理平台;检测到第二车辆在第二时间点、第二位置被大车挡住,关联所述第二车辆和所述大车,上报所述第二车辆的车辆信息、所述第二时间点、第二位置、所述大车的标识至所述管理平台;以及,检测到第三车辆从大车后出现时,为所述第三车辆分配车辆标识,记录发现所述第三车辆的第三时间点和第三位置并上报给管理平台;对所述第三车辆进行跟踪,记录跟踪到的所述第三车辆的行驶信息,在所述第三车辆到达当前中间节点对应的识别点时,将所述第三车辆到达当前中间节点对应的识别点的时间点、所述第三车辆的车辆信息、所述第三车辆的车辆标识发送给下一个节点;其中,所述大车为尺寸满足预设尺寸要求的车辆;所述出口节点还被配置为,确定对所述第一车辆的跟踪正确时,上报对所述第一车辆的跟踪正确信息至所述管理平台,以及,上报所述第一车辆的车辆信息和行驶信息至所述管理平台;
所述管理平台被配置为,根据所述跟踪正确的第一车辆的行驶信息对所述第一车辆进行交通行为判定;以及,接收所述出口节点上报的所述第三车辆的行驶信息和车辆信息,所述行驶信息包括时空轨迹,确定所述第三车辆为曾经跟丢的车辆时,获取所述第三车辆的第三时间点和第三位置,查找时空轨迹存在所述第三时间点和所述第三位置构成的时空位置的目标大车,确定在所述第三时间点前被所述目标大车遮挡过的第一关联车辆,获取所述目标大车遮挡所述第一关联车辆的时间点,称为关联时间点;以及,将所述第一关联车辆在所述关联时间点之前的时空轨迹,所述目标大车在所述关联时间点至所述第三时间点的时空轨迹,所述第三车辆在所述第三时间点之后的时空轨迹进行拼接得到目标临时轨迹,根据所述第一关联车辆的车辆信息和所述第三车辆的车辆信息是否相同确定所述目标临时轨迹是否正确,且在正确时将所述目标临时轨迹作为所述第三车辆的时空轨迹。
技术总结
一种雷达视觉协同的目标跟踪方法和目标跟踪系统,所述雷达视觉协同的目标跟踪方法包括:在入口节点获取第一车辆的第一图像确定车辆信息,将车辆信息、经过入口节点对应的识别点的时间点发送给与相邻的中间节点;在中间节点基于雷达跟踪信息确定第一车辆的行驶信息;将所述第一车辆到达识别点的时间点、车辆信息发送给下一个节点;在出口节点基于雷达跟踪信息确定行驶信息,以及,获取第一车辆的第二图像确定车辆信息,当根据所述第二图像确定的车辆信息与接收到的车辆信息一致时,确定跟踪正确。本实施例提供的方案,通过在中间节点使用雷达对车辆进行跟踪,应用在隧道场景下时可以避免在隧道内设置摄像机,且实现对隧道内车辆的高精度跟踪。的高精度跟踪。的高精度跟踪。
技术研发人员:周迪 邓松杰 徐爱华 张鹏国
受保护的技术使用者:浙江宇视科技有限公司
技术研发日:2022.06.16
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。