1.本发明涉及无人机勘探技术领域,具体来讲,涉及一种基于多旋翼无人机的基建设施测量方法和一种基于多旋翼无人机的基建设施测量系统。
背景技术:
2.基建设施是我国交通的重要组成部分。随着使用年限的增长以及通车量的不断增加,部分基建设施可能出现承载力下降、形变、内部结构损伤以及表面裂纹等问题,会造成巨大的经济损失。因此,对基建设施进行定期的、系统性的测量工作,并基于此进行基建设施的寿命预测、健康状态评估以及灾害预防是必要的。
3.现有技术中,针对地面基建设施的测量方法形成了很多研究成果。例如,于2012年1月11日公开的名称为大地测量装置、公开号为cn102317738a的专利文献记载了一种基于经纬仪或全站仪的大地测量装置,该测量装置借助望远测量的方式,可实现目标角度和距离测量的功能,但这种方式易受到大气扰动的干扰,导致观测困难、测量误差大的问题。于2018年9月7日公开的名称为一种桥梁检测装置、公开号为cn207828780u的专利文献记载了一种桥梁检测装置,利用液压系统将工作臂弯曲深入到桥底对桥梁进行检测,虽然检测人员无需到桥面以下,但不能进行高频次的满载荷在线检测,且还是需要工人在桥面上测量,具有一定的安全隐患。于2016年10月26日公开的名称为一种基于光纤传感器的自供电桥梁受损情况实时监测装置、公开号为cn106053388a的专利文献记载了一种基于光纤传感器的桥梁受损情况实时检测装置,可通过解调后的光信号判断桥梁受损位置,这种分布式预埋光电类传感器的方式存在建设施工复杂,累计误差大,后续纠察难,且苛刻自然环境下光电传感器损坏率高且更换麻烦,更换成本高等问题。除此之外,对于特大型的基建设施,其结构形状以及所处环境极其复杂,且大多数都是凌空建设,侧面和底部人力难以接近。对于这种特大型的基建设施,除了难以测量之外,如何直观地给出缺陷所在位置也是亟待解决的问题。
4.无人机技术以及多种高精度、高性能的传感器的融合技术的高速发展为特大型基础建筑工程的测量工作提供了新的思路。无人机技术指的是利用无线电遥控或嵌入式程序装置控制的不载人飞机,具有体积小、重量轻、成本低、环境适应好等优势,可以在人力难以到达的地方完成多种复杂任务,广泛应用于军事侦查、航拍、电力巡检、灾情监控等领域。
5.例如,于2019年10月22日公开的名称为一种基于四旋翼无人机的大型储罐自主巡检方法、公开号为cn110362100a的专利文献记载了一种基于四旋翼无人机的大型储罐自主巡检方法,上位机根据储罐的几何参数规划路线并输入给无人机,无人机按照该路径对罐体表面进行巡检,实时记录隐患点的位置。这种检测方法选用四旋翼无人机进行检测任务,操控灵活性以及载荷能力上有所欠缺。于2016年11月16日公开的名称为检测结构件表面裂缝的多旋翼无人机检测平台系统及其用于检测结构件表面裂缝的方法、公开号为cn106124517a的专利文献记载了一种检测大型结构件表面裂缝的多旋翼无人机系统,由安装在地面站的主控机借助数传电台控制无人机的飞行,利用相机与激光测距仪采集结构件
表面数据后,建立起稳定的实际物体尺度和图像尺度的对应关系,从而达到获取裂缝的实际尺寸的目的。这种方式虽然自动化程度和测量精度有了一定程度的提高,但存在需要根据目标相对无人机的位置调整传感器的安装位置、传感器种类不足导致无法获取裂缝深度信息、裂缝展示效果不直观的问题。
6.因此,有必要提出一种能够实现高效率、高精度、高安全系数的基建设施测量任务的无人机测量方法。
技术实现要素:
7.本发明的目的在于解决现有技术存在的上述不足中的至少一项。例如,本发明的目的之一在于提供一种以多旋翼无人机和多传感器融合技术为基础的基建设施的高精度测量系统,以克服基建设施安全监测过程中传统的依赖人工且精度不够的问题。
8.为了实现上述目的,本发明一方面提供了一种基于多旋翼无人机的基建设施测量系统,包括多旋翼无人机,还包括搭载在无人机平台上的多传感融合测量子系统和设置在地面的地面端数控子系统;所述多传感融合测量子系统包括多传感器采集单元、授时单元、同步驱动单元、天空控制单元和机载通信单元;其中,所述授时单元,用于获取卫星时间信息,并输出秒时间脉冲和推荐定位信息;所述同步驱动单元与所述授时单元连接,用于根据秒时间脉冲针对不同类型的传感器产生不同类型的同步控制信号,并记录在同步驱动单元时间系下产生同步控制信号的第一控制采集时间,和多传感器采集单元返回采集数据的第二控制采集时间,所述同步控制信号包括同步脉冲和同步触发指令;所述多传感器采集单元分别与所述同步驱动单元和所述天空控制单元连接,用于在同步控制信号的触发下开始采集基建设施的相关数据,并包括第一多传感器模组和第二多传感器模组,第一多传感器模组能够在同步脉冲的触发下开始采集数据,并将对应的采集数据和内部采集时间传输至天空控制单元,第二多传感器模组能够在同步触发指令的触发下开始采集数据,并将对应的采集数据传输至同步驱动单元;所述天空控制单元分别与所述无人机平台、所述同步驱动单元和所述多传感器采集单元连接,用于获取机体飞行状态信息、不同类型传感器的内部采集时间、采集数据、第一控制采集时间和第二控制采集时间,并对不同类型传感器的采集数据进行时间同步;所述机载通信单元分别与所述无人机平台、所述天空控制单元和所述地面端数控子系统连接,用于无人机平台、天空控制单元和地面端数控子系统之间的通信数据传输;所述地面端数控子系统,用于向多传感融合测量子系统和无人机平台发送地面控制信号,以及根据时间同步后的基建设施采集数据完成基建设施的三维重建。
9.在本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例中,所述第一多传感器模组可包括激光雷达和摄像装置,其中,所述激光雷达用于采集基建设施的点云数据;所述摄像装置包括全景相机和全局相机,全景相机用于获取机上实时飞行图像数据,全局相机用于获取基建设施表面图像数据;所述第二多传感器模组包括惯性测量传感器、差分定位传感器和激光测距仪,其中,所述惯性测量传感器用于获取无人机飞行过程中的imu数据;所述差分定位传感器用于获取无人机飞行过程中的rtk数据,以校正无人机位姿;所述激光测距仪用于获取高精度激光标定点的位置信息。
10.在本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例中,所述地面端数控子系统可包括地面基站,所述地面基站用于接收和观测卫星导航信号,并进行
差分处理以生成差分数据。
11.在本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例中,所述同步驱动单元可包括基时钟模块、标准时间确定模块、脉冲处理模块、同步触发指令确定模块、采集数据解析模块和匹配模块,其中,所述基时钟模块被配置为能够结合秒时间脉冲产生基时钟和基计数器,所述基计数器用于记录在同步驱动单元时间系下生成同步脉冲的第一秒内时间戳,和第二多传感器模组经同步触发指令的触发后返回采集数据的第二秒内时间戳;所述标准时间确定模块被配置为能够对推荐定位信息进行解析,以提取世界标准时间,并对世界标准时间进行标记;所述脉冲处理模块与所述基时钟模块连接,并被配置为能够基于基时钟将秒时间脉冲校准为同步脉冲,并根据预设的触发信号偏移参数生成不同类型传感器的同步触发信号,所述同步触发指令确定模块与所述脉冲处理模块连接,并被配置为能够基于同步触发信号,产生不同类型传感器的同步触发指令;所述采集数据解析模块与所述第二多传感器模组连接,并被配置为能够解析获得第二多传感器模组的采集数据;所述匹配模块与所述采集数据解析模块连接,并被配置为能够分别将第二多传感器模组的采集数据和对应的第二秒内时间戳拼接,并进行标记,以获得对应的传感器采集数据集。
12.在本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例中,所述同步驱动单元还可包括第一存放区、第二存放区、第三存放区和串行上传模块,其中,所述第一存放区与所述匹配模块连接,包括多个缓冲模块,分别用于存放第一多传感器模组的第一秒内时间戳;所述第二存放区与所述匹配模块连接,包括多个缓冲模块,分别用于存放第二多传感器模组的采集数据集;所述第三存放区与所述标准时间确定模块连接,用于存放世界标准时间;所述串行上传模块分别与所述第一存放区、第二存放区和第三存放区连接,用于按照预设的访问顺序对三个存放区依次进行访问。
13.在本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例中,所述天空控制单元可包括真实采集时间确定模块和时间坐标对齐模块,其中,所述真实采集时间确定模块被配置为能够根据第一秒内时间戳和内部采集时间,求解第一多传感器模组的第一真实采集时间,还能够根据第二秒内时间戳,确定第二多传感器模组的第二真实采集时间;所述时间坐标对齐模块被配置为能够将第一多传感器模组的采集数据与第一真实采集时间进行一一对应,将第二多传感器模组的采集数据与第二真实采集时间进行一一对应。
14.在本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例中,所述多旋翼无人机的旋翼数可大于等于6。
15.本发明另一方面还提供了一种基于多旋翼无人机的基建设施测量方法,所述测量方法包括以下步骤:步骤s1、基建设施测量系统状态自检,确认状态是否正常;步骤s2、通过地面端数控子系统控制多旋翼无人机绕待测目标进行初次飞行,并开始多传感器的同步采集数据处理,所述同步采集数据处理包括以下子步骤:子步骤s21、通过授时单元获取卫星时间信息,并输出秒时间脉冲和推荐定位信息;子步骤s22、通过同步驱动单元根据秒时间脉冲针对不同类型的传感器产生不同类型的同步控制信号,以触发对应类型的传感器开始采集数据,并记录在同步驱动单元时间系下产生同步控制信号的第一控制采集时间,和第二多传感器模组返回采集数据的第二控制采集时间;子步骤s23、获取多传感器采集单元输
出的采集数据和内部采集时间;子步骤s24、针对第一多传感器模组,分别根据第一控制采集时间和内部采集时间计算第一真实采集时间;针对第二多传感器模组,将第一控制采集时间确定为第二真实采集时间;子步骤s25、将第一多传感器模组的采集数据与第一真实采集时间进行一一对应,将第二多传感器模组的采集数据与第二真实采集时间进行一一对应,以保证所有传感器的采集数据在同一时间坐标下;步骤s3、根据多传感融合测量子系统回传的同步采集数据估计无人机的真实位姿,并基于slam算法构建基建设施的三维高精地图模型。
16.在本发明的基于多旋翼无人机的基建设施测量方法的一个示例性实施例中,所述第一控制采集时间和第二控制采集时间的确定方式可为:通过基计数器进行时间计数,将生成同步脉冲时对应的时间计数值作为第一秒内时间戳,将第二多传感器模组返回采集数据时对应的时间计数值作为第二秒内时间戳;根据第一秒内时间戳和世界标准时间,确定第一控制采集时间,根据第二秒内时间戳和世界标准时间,确定第二控制采集时间。
17.在本发明的基于多旋翼无人机的基建设施测量方法的一个示例性实施例中,所述第一真实采集时间的计算公式可如下所示:tf=(t
pc-t
f_pc
) tf,t1=(t
pc-t
1_pc
) t1,t0=t
f-t1 dt,t
1_real
=t1 dt t0,式中,t0为同步驱动单元的初始时刻,dt为同步驱动单元对同步脉冲的校准时延,tf为当天空控制单元接收到第二秒内时间戳时,对应的同步驱动单元时间系下的时刻,t
f_pc
为天空控制单元当接收到第二秒内时间戳时,对应的天空控制单元时间戳,t1为当天空控制单元接收到第一多传感器模组的采集数据时,对应的第一多传感器模组时间系下的时刻,t
1_pc
为当天空控制单元接收到第一多传感模组的采集数据时,对应的天空控制单元时间戳,dt为自天空控制单元开始接收第一多传感器模组的采集数据以来经历的时间,t
pc
为经历dt后对应的天空控制单元时间戳,tf为经历dt后同步驱动单元时间系的时刻,t1为经历dt后第一多传感模组时间系下的时刻,t
1_real
为t1对应的同步驱动单元时间系下的第一真实采集时间。
18.与现有技术相比,本发明的有益效果包括以下内容中的至少一项:(1)本发明的测量系统能够自动化、智能化、低成本、高精度的对桥梁、大坝、能源等基建设施工程的安全状况进行定期检测与测量;(2)本发明的测量方法相比于传统的基建设施测量方法节省了大量的人力物力,操作流程简明方便,且不具备安全隐患,适用于特大型基建设施的精密测量工作;(3)本发明可实现精密、直观的测量效果,有效提高检修人员的工作效率,为基建设施提供健康状态监测;(4)本发明能够解决现有数据采集方法传感器数据同步精度不足而导致的基建设施检测效果不佳的问题以及传感器数据量过大无法在线高质量处理而导致采集数据畸变矫正失败,影响算法重建效果,从而影响检测结果的问题。
附图说明
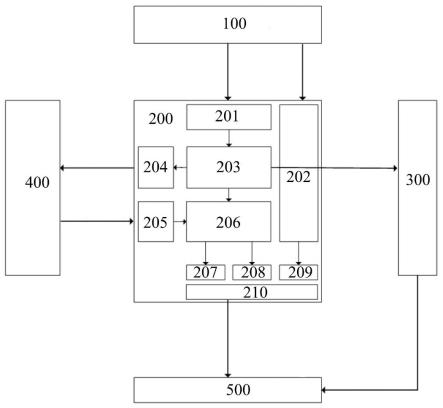
19.通过下面结合附图进行的描述,本发明的上述和其他目的和/或特点将会变得更加清楚,其中:图1示出了本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例的基建设施测量系统的结构/示意图。
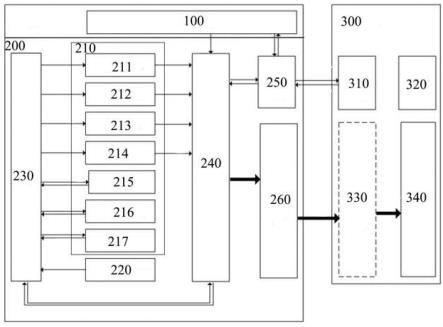
20.图2示出了本发明的基于多旋翼无人机的基建设施测量系统的一个示例性实施例的基建设施测量系统的测量原理图。
21.图3示出了本发明的基于多旋翼无人机的基建设施测量方法的一个示例性实施例的同步采集数据处理的流程示意图。
22.图4示出了本发明的基于多旋翼无人机的基建设施测量方法的一个示例性实施例的激光雷达时间同步方法的流程示意图。
23.附图标记说明:100-六旋翼无人机,200-多传感融合测量子系统,210-多传感器采集单元,211-全局相机一,212-全局相机二,213-全景相机,214-激光雷达,215-惯性测量传感器,216-激光测距仪,217-差分定位传感器,220-gnss高精度授时单元,230-同步驱动板,240-工控机,250-无线数传单元,260-传感器数据高速存储器一,300-地面端数控子系统,310-地面控制单元,320-rtk地面基站,330-传感器数据高速存储器二,340-高性能服务器,400-基建设施建设工程。
具体实施方式
24.在下文中,将结合示例性实施例来详细说明本发明的基于多旋翼无人机的基建设施测量系统和方法。需要说明的是,“第一”、“第二”、“第三”等仅仅是为了方便描述和便于区分,而不能理解为指示或暗示相对重要性。
25.发明人经研究发现:利用无人机搭载多种传感器,如可获取丰富纹理和距离信息的相机、获取精确的绝对位置信息的rtk、获取具有准确距离信息的激光雷达等,对基建设施表面结构进行数据采集并进行三维重建、瑕疵检测等精密算法处理,可以安全、简便、高效、精准地实现基建设施的检测工作。
26.工业六旋翼无人机可通过改变不同旋翼的速度以改变无人机的姿态和位置。由于比四旋翼无人机多出两个自由度,六旋翼无人机拥有更好的稳定性、可操控性以及更优秀的负载能力。而多传感融合技术可充分利用各传感器之间的冗余信息,得到更全面的测量数据,同时各个传感器之间的数据相互约束,可实现更高的测量精度。利用工业六旋翼无人机搭载基于多传感融合技术的云台测量系统,可充分结合二者的优势,实现高效率、高精度、高安全系数的基建设施测量任务。
27.基于此,本发明提供了一种融合了工业多旋翼无人机与多传感器融合技术的高精度基建设施的测量系统和方法。该系统可通过初次飞行时的激光雷达、全景相机、惯性测量传感器(inertial measurement unit,imu)以及实时差分定位(real time kinematic,rtk)数据估计无人机的真实位姿,并可利用地面站服务主机中搭载的同步定位与地图构建(simultaneous localization and mapping,slam)算法进行三维重建,构建精密的特大基建设施三维高精地图。
28.此外,发明人还发现:基于无人机的多传感器数据采集技术是上述方法中的重要一环,其采集到的多传感器数据质量直接影响了后续算法的处理效果。但目前基于无人机的多传感器数据采集技术主要有以下难点:(1)多传感器之间的时间同步精度低,未精确对齐的时间戳和传感器数据将造成后续处理算法精度下降,甚至得到完全错误的结果,影响基建设施检测的效果;
(2)多传感器在线采集过程中产生了大量的实时传感器数据,如相机图像数据和激光雷达的点云数据,而机上的无线数据传输带宽有限,无法实时将所有数据传输至地面端系统处理,而采取降采样之类的方式可以满足传输带宽,但直接损失了算法结果的有效性;(3)受载荷能力限制,无人机的典型续航时间往往不超过30分钟,这决定了无人机无法负载高功耗、高算力的机上在线计算单元,无法高质量地实时处理多传感器实时采集的数据。
29.为此,本发明形成了一种具有高时间同步精度以及具备应对大量传感器实时数据能力的无人机多传感器数据同步采集方法,以将机上各种传感器的时间信息/数据信息超低误差地高质量采集和保存下来。即利用gnss生成一秒一次的秒时间脉冲,在此基础上由同步驱动板按照各个传感器的需求的帧率生成各自的触发信号以及该触发信号的纳秒时间戳,并将纳秒时间戳及其所属传感器的标识符上载至工控机,工控机通过解析标识符将各传感器的纳秒时间戳与对应的数据对齐。由此保证了所有传感器数据时间同步。
30.为了实现上述目的,本发明一方面提供了一种基于多旋翼无人机的基建设施测量系统。在本发明的一个示例性实施例中,基于多旋翼无人机的基建设施测量系统包括多旋翼无人机、搭载在无人机云台上的多传感融合测量子系统和设置在地面的地面端数控子系统。
31.多传感融合测量子系统包括多传感器采集单元、授时单元、同步驱动单元、天空控制单元和无线数传单元。
32.授时单元,用于获取卫星时间信息,并每间隔1s输出秒时间脉冲和推荐定位信息。
33.同步驱动单元与授时单元连接,用于根据秒时间脉冲针对不同类型的传感器产生不同类型的同步控制信号,并记录在同步驱动单元时间系下产生同步控制信号的第一控制采集时间,和多传感器采集单元返回采集数据的第二控制采集时间。同步控制信号包括同步脉冲和同步触发指令,同步脉冲用于触发第一多传感器模组开始采集数据,同步触发指令用于触发第二多传感器模组开始采集数据。
34.具体来讲,同步驱动单元接收到秒时间脉冲的同时,一方面将秒时间脉冲进行校准,获得同步脉冲,并将同步脉冲发送给第一多传感器模组,以触发第一多传感器模组开始采集数据;另一方面在秒时间脉冲校准后,根据预设时刻偏置参数生成同步触发指令,并将其传输给第二多传感器模组,以触发第二多传感器模组开始采集数据。另外,同步驱动单元接收到推荐定位信息的同时,会将其进行解析,提取出世界标准时间,并传输至天空控制单元。
35.多传感器采集单元分别与同步驱动单元和天空控制单元连接,用于在同步控制信号的触发下开始采集基建设施(例如,桥梁、大坝、能源等基建设施工程)的相关数据。多传感器采集单元包括第一多传感器模组和第二多传感器模组,第一多传感器模组能够在同步脉冲的触发下开始采集数据,并将对应的采集数据和内部采集时间传输至天空控制单元,第二多传感器模组能够在同步触发指令的触发下开始采集数据,并将对应的采集数据传输至同步驱动单元。
36.天空控制单元分别与无人机平台、同步驱动单元和多传感器采集单元连接,用于获取机体飞行状态信息、不同类型传感器的内部采集时间、采集数据、第一控制采集时间和
第二控制采集时间,并对不同类型传感器的采集数据进行时间同步。
37.无线数传单元分别与无人机平台、天空控制单元和地面端数控子系统连接,用于无人机平台、天空控制单元和地面端数控子系统之间的通信数据传输。
38.地面端数控子系统,用于向多传感融合测量子系统和无人机平台发送地面控制信号,以及根据时间同步后的基建设施采集数据完成基建设施的三维重建。
39.在本实施例中,第一多传感器模组可包括激光雷达和摄像装置。其中,激光雷达用于采集基建设施的点云数据。摄像装置包括全景相机(例如,短焦全景相机)和全局相机(例如,双目可见光相机),全景相机用于获取机上实时飞行图像数据,全局相机用于获取基建设施表面图像数据。
40.第二多传感器模组可包括惯性测量传感器、差分定位传感器和激光测距仪。其中,惯性测量传感器用于获取无人机飞行过程中的imu数据(例如,运动和姿态数据)。惯性测量传感器可以为mems-imu、6轴imu和9轴imu中的至少一种。差分定位传感器用于获取无人机飞行过程中的rtk数据(例如,位置数据),以校正无人机位姿。差分定位传感器可以为实时载波相位差分定位rtk。激光测距仪用于获取高精度激光标定点的位置信息,可以为混合固态式激光雷达、固态式激光雷达和高精激光测距仪中的至少一种。
41.另外,激光测距仪、惯性测量传感器和差分定位传感器可通过各自的串口与同步驱动单元连接,摄像装置可与同步驱动单元直连。
42.在本实施例中,同步驱动单元可包括基时钟模块、标准时间确定模块、脉冲处理模块、同步触发指令确定模块、采集数据解析模块和匹配模块。
43.其中,基时钟模块被配置为能够结合秒时间脉冲产生基时钟和基计数器。基计数器用于记录在同步驱动单元时间系下生成同步脉冲的第一秒内时间戳,和第二多传感器模组经同步触发指令的触发后返回采集数据的第二秒内时间戳。需要说明的是,根据第一秒内时间戳可确定第一控制采集时间,根据第二秒内时间戳可确定第二控制采集时间。基时钟模块中设置有秒计数器,若秒计数器计满或者接收到秒时间脉冲,则对秒计数器进行复位,并将该秒计数器作为整个同步驱动单元的基计数器,由该基计数器产生的时钟脉冲信号作为基时钟信号。基计数器自开启后就一直工作,并在秒时间脉冲上升沿或在内部秒计数器满时进行复位。
44.标准时间确定模块被配置为能够对推荐定位信息进行解析,以提取世界标准时间,并对世界标准时间进行标记。
45.脉冲处理模块与基时钟模块连接,并被配置为能够基于基时钟将秒时间脉冲校准为同步脉冲,并根据预设的触发信号偏移参数生成不同类型传感器的同步触发信号。
46.同步触发指令确定模块与脉冲处理模块连接,并被配置为能够基于同步触发信号,产生不同类型传感器的同步触发指令。
47.采集数据解析模块与第二多传感器模组连接,并被配置为能够解析获得第二多传感器模组的采集数据。
48.匹配模块与所述采集数据解析模块连接,并被配置为能够分别将第二多传感器模组的采集数据和对应的第二秒内时间戳拼接,并进行标记,以获得对应的传感器采集数据集。
49.进一步地,同步驱动单元还可包括第一存放区、第二存放区、第三存放区和串行上
传模块。其中,第一存放区与匹配模块连接,包括多个缓冲模块,分别用于存放第一多传感器模组的第一秒内时间戳。第二存放区与匹配模块连接,包括多个缓冲模块,分别用于存放第二多传感器模组的采集数据集。第三存放区与标准时间确定模块连接,用于存放世界标准时间。串行上传模块分别与第一存放区、第二存放区和第三存放区连接,用于按照预设的访问顺序生成访问信号对三个存放区依次进行访问,并生成串行数据包。例如,访问顺序可以预先设置为:第三存放区》第一存放区》第二存放区。
50.设置存放区和串行上传模块的原因是:三种数据来源的产生时刻并不一定,极有可能同时或时刻相近产生。而同步驱动单元上传到天空控制单元的数据通道只有一条,无法同时将多种数据来源进行上传。通过设置存放区和串行上传模块,可以将并行产生的数据缓存在存放区中,并通过串行上传模块根据访问顺序依次读出,从而使得并行数据变为串行数据,从而可以通过一条通道上传到天空控制单元中。
51.在本实施例中,天空控制单元可包括真实采集时间确定模块和时间坐标对齐模块。其中,真实采集时间确定模块被配置为能够根据第一秒内时间戳和内部采集时间,求解第一多传感器模组的第一真实采集时间,还能够根据第二秒内时间戳,确定第二多传感器模组的第二真实采集时间。也就是说,真实采集时间确定模块用于根据激光雷达和摄像装置的第一秒内时间戳和内部采集时间,求解对应的真实lidar时间和真实摄像时间,还用于根据惯性测量传感器、差分定位传感器和激光测距仪的第二秒内时间戳,确定对应的真实imu时间、真实rtk时间和真实测距时间。时间坐标对齐模块被配置为能够将第一多传感器模组的采集数据与第一真实采集时间进行一一对应,将第二多传感器模组的采集数据与第二真实采集时间进行一一对应。
52.在本实施例中,地面端数控子系统可包括地面控制单元、地面基站和地面服务主机。其中,地面基站用于接收和观测卫星导航信号,并进行差分处理以生成差分数据,从而生成精准的三维位置信息。地面控制单元用于接收天空控制单元输出的各传感器采集数据和无人机实时飞行参数,并向发送控制信号,以控制无人机飞行状态和各传感器工作状态。地面服务主机与地面控制单元连接,并配置有slam三维重建算法,用于根据采集数据完成基建设施的三维重建。
53.在本实施例中,多传感融合测量子系统还可包括伺服电机模块和电源模块。伺服电机模块与同步驱动单元连接,用于无人机平台的运动控制。例如,伺服电机模块可包括横滚伺服电机、航向伺服电机、俯仰伺服电机以及闭环驱动电机中的至少一种,额定速度为8000rpm,转子惯量为0.4264kg.cm2,失速时连续转矩为1.7nm。电源模块分别与天空控制单元和同步驱动单元连接,用于向天空控制单元和同步驱动单元供电,以机载电池为输入电源,保证测量系统的长时间工作。
54.在本实施例中,多旋翼无人机的旋翼数可大于等于6。例如,可选用六旋翼无人机,其抗风性强,载重能力强,可垂直起降和悬停,适用于低空低速且连续挂载悬停测量任务的场景。又例如,可选用八旋翼无人机,其对方向的可操控性相比于六旋翼更强,且具有更优秀的负载能力与抗风能力,适合搭载多种载荷完成精密的测量工作。
55.本发明另一方面提供了一种基于多旋翼无人机的基建设施测量方法。在本发明的另一个示例性实施例中,基于多旋翼无人机的基建设施测量方法包括以下步骤。
56.步骤s1、基建设施测量系统状态自检,确认状态是否正常。
57.步骤s2、飞手控制多旋翼无人机按照全球导航卫星系统(global navigation satellite system,gnss)生成的低精度三维地图围绕待测目标(也就是基建设施)进行初次飞行,利用无人机平台上搭载的多传感融合测量子系统采集基建设施的表面数据,并开始多传感器的同步采集数据处理。具体来讲,同步采集数据处理可包括以下子步骤:子步骤s21、通过授时单元获取卫星时间信息,并每间隔1s输出秒时间脉冲和推荐定位信息。
58.子步骤s22、通过同步驱动单元根据秒时间脉冲针对不同类型的传感器产生不同类型的同步控制信号,以触发对应类型的传感器开始采集数据,并记录在同步驱动单元时间系下产生同步控制信号的第一控制采集时间,和第二多传感器模组返回采集数据的第二控制采集时间。
59.子步骤s23、获取多传感器采集单元输出的采集数据和内部采集时间。
60.子步骤s24、针对第一多传感器模组,分别根据第一控制采集时间和内部采集时间计算第一真实采集时间;针对第二多传感器模组,将第一控制采集时间确定为第二真实采集时间。
61.子步骤s25、将第一多传感器模组的采集数据与第一真实采集时间进行一一对应,将第二多传感器模组的采集数据与第二真实采集时间进行一一对应,以保证所有传感器的采集数据在同一时间坐标下。
62.另外,初次飞行的数据采集完成后,应判断自动飞行状态数据是否正常,如果异常则进入人工模式介入飞行任务;如果正常则将采集的基建设施表面数据传输至地面端数控子系统,以完成三维高精地图的构建。
63.步骤s3、根据多传感融合测量子系统回传的同步采集数据估计无人机的真实位姿,并基于slam算法构建基建设施的三维高精地图模型。
64.在本实施例中,第一控制采集时间和第二控制采集时间的确定方式可为:(1)通过基计数器进行时间计数,将生成同步脉冲时对应的时间计数值作为第一秒内时间戳,将第二多传感器模组返回采集数据时对应的时间计数值作为第二秒内时间戳。
65.(2)根据第一秒内时间戳和世界标准时间,确定第一控制采集时间,根据第二秒内时间戳和世界标准时间,确定第二控制采集时间。进一步地,第一真实采集时间的计算公式可如下所示:tf=(t
pc-t
f_pc
) tf,t1=(t
pc-t
1_pc
) t1,t0=t
f-t1 dt,t
1_real
=t1 dt t0。
66.式中,t0为同步驱动单元的初始时刻,dt为同步驱动单元对同步脉冲的校准时延,tf为当天空控制单元接收到第二秒内时间戳时,对应的同步驱动单元时间系下的时刻,t
f_pc
为天空控制单元当接收到第二秒内时间戳时,对应的天空控制单元时间戳,t1为当天空控制单元接收到第一多传感器模组的采集数据时,对应的第一多传感器模组时间系下的时刻,t
1_pc
为当天空控制单元接收到第一多传感模组的采集数据时,对应的天空控制单元时间戳,dt为自天空控制单元开始接收第一多传感器模组的采集数据以来经历的时间,t
pc
为
经历dt后对应的天空控制单元时间戳(也就是当接收到任意一帧第一多传感器模组的采集数据时,对应的天空控制单元时间戳),tf为经历dt后同步驱动单元时间系的时刻(也就是当接收到任意一帧第一多传感器模组的采集数据时,对应的同步驱动单元时间下的时刻),t1为经历dt后第一多传感模组时间系下的时刻,t
1_real
为t1对应的同步驱动单元时间系下的第一真实采集时间(也就是当接收到任意一帧第一多传感器模组的采集数据时,对应的第一多传感器模组时间系下的内置计数时刻)。
67.为了更好地理解本发明的上述示例性实施例,下面结合具体示例对其进行进一步说明。
68.示例1本示例提出了一种基于工业六旋翼无人机,并结合了双目超清相机、激光测距仪、imu、激光雷达和rtk等多传感融合的一种基建设施测量系统。
69.如图1所示,基建设施测量系统由六旋翼无人机100、多传感融合测量子系统200和地面端数控子系统300组成。
70.其中,选用的六旋翼无人机抗风性强,载重能力强,可垂直起降和悬停,适用于低空低速且连续挂载悬停测量任务的场景。六旋翼无人机100的平台本体重量为13.6kg,抗风等级为6级,最大额外挂载重量为10kg,使用海拔最高可达4500m,最大飞行速度为15m/s,最大飞行高度为2000m,用于搭载多传感融合测量子系统,在地面遥控的指令下携带云台全方位采集基建设施表面数据。无人机平台一方面用于搭载多传感融合测量子系统,另一方面用于将机体飞行状态信息传输至工控机以及无线数传单元,以判断同步采集工作是否存在异常。
71.多传感融合测量子系统200包括多传感器采集单元210、gnss高精度授时单元220、同步驱动板230、工控机240、无线数传单元250和传感器数据高速存储器一260。
72.gnss高精度授时单元220与同步驱动板230相连,用于获取来自卫星精确时间信息,基于此产生秒时间脉冲和包含授时信息的推荐定位信息,并传输至同步驱动板230。
73.多传感器采集单元210由第一多传感器模组和第二多传感器模组构成,第一多传感器模组包括全局相机一211、全局相机二212、全景相机213和激光雷达214,第一多传感器模组包括惯性测量传感器(简称imu)215、激光测距仪216和差分定位传感器(简称rtk传感器)217。全局相机一211、全局相机二212和全景相机213通过usb或网口与工控机240相连,激光雷达214通过网口与工控机240相连。
74.多传感器采集单元用于采集基建设施的相关数据,为后续算法处理提供基础。其中,激光雷达用于获取基建设施的点云数据,并通过网口传输至工控机,经工控机完成时间戳和数据匹配后存储于传感器高速数据存储器一中。全局相机用于获取基建设施表面图像数据,并通过usb传输至工控机,经工控机完成时间戳和数据匹配后存储于传感器高速数据存储器一中。全景相机用于获取机上实时飞行图像数据,并通过工控机以及无线数传单元实时传输至地面控制单元,以辅助地面操作人员进行安全的采集工作。imu用于获取机体运动与姿态信息,由同步驱动板传输至工控机,再由工控机存储于传感器高速数据存储器一中。激光测距仪用于获取高精度激光标定点的位置信息,由同步驱动板传输至工控机,再由工控机存储于传感器高速数据存储器一中。rtk传感器用于获取无人机绝对位置信息,由同步驱动板传输至工控机,再由工控机存储于传感器高速数据存储器一中。
75.imu传感器的角度测量精度为
±
0.01
°
,加速度测量误差为
±
0.01g,频率为100hz。激光雷达频率为10hz,每秒获取点云数量为100000个,距离测量误差为
±
2cm,角度测量误差小于
±
0.1
°
。
76.imu传感器由串行通信单元与工控机连接,并发送三轴角速度、三轴加速度数据给工控机,工控机将带有时间戳的imu数据发送给同步驱动板,工控机同时通过串行通信单元连接激光雷达(lidar),发送时间数据。工控机通过同步驱动板传输回的带有时间戳的lidar点云数据和rtk数据完成imu和lidar的时间同步。
77.激光雷达扫描得到的带有时间戳的点云数据通过网口传输给同步驱动板,同步驱动板结合lidar数据和imu数据完成对lidar点云的运动畸变补偿。
78.激光测距仪波长为630nm,频率为5hz~20hz,测量范围0.05m~40m,分辨率为1mm,测量精度为
±
1mm,用于给定百米内误差不超过1mm、频率为5hz~20hz的高精度的激光标定点。利用rtk数据将各传感器的采集时间同步,由imu传感器的运动信息以及激光测距仪给定的高精度标定点校正其他传感器的数据。
79.全景相机分辨率为4k,像元尺寸为3.9μm,曝光方式为全局曝光,用于采集大视场角场景的可见光图像并进行后续的三维重建与被测物体特征提取工作。全局相机分辨率为4k,像元尺寸为5μm,曝光方式为全局曝光,用于获取基建设施表面的立体图像数据并进行后续的智能测量算法。
80.rtk传感器的定位精度为
±
2cm,用于校正无人机位姿估计以及各传感器的时间同步。rtk数据除了用于slam算法计算无人机位姿,还产生秒脉冲并传递到同步驱动板,用于imu和lidar的时间同步。rtk具有厘米级的位置估计精度,将rtk的数据与纳秒时间戳上载,将rtk精确的位姿信息作为一个新的残差项输入到误差迭代卡尔曼滤波器中,通过最小化各个传感器的误差即可校正无人机的位姿估计。
81.同步驱动板(也就是同步驱动单元)230接收gnss高精度授时单元220传输的秒时间脉冲以及gnss-nmea标准报文,存储解析到秒时间脉冲对应的世界标准时间,并基于不同传感器类型产生稳定的同步脉冲以及同步触发指令,分别触发不同类型的传感器,还用于在同步驱动板内部拼接imu、激光测距仪以及rtk的数据和时间戳,并将存储的世界标准时间、imu、激光测距仪、rtk同步数据、触发全局相机以及激光雷达的同步脉冲对应的时间戳数据发送给工控机240。
82.工控机(也就是天空控制单元)240为机载工控机,处理器主频为1.6ghz,内存为8gb,存储空间为1tb,用于通过地面端数控子系统的指令来控制无人机上各功能模块的运转以及无人机的运动,将激光雷达数据实时传输至高性能服务器以实时观察数据采集状态,并储存来自相机以及同步驱动板采集的各种传感器的数据。工控机分别接收来自地面端数控子系统的控制信号、3个相机来自usb口的图像数据、激光雷达来自网口的点云数据,同步驱动板发送的世界标准时间数据和时间戳、imu数据和时间戳、激光测距仪数据和时间戳、rtk数据和时间戳、触发全局相机以及激光雷达的同步脉冲对应的时间戳,无人机平台发送的实时飞行数据。针对3个相机和激光雷达来说,工控机将直接来自传感器的数据和来自同步驱动板的触发信号时间戳信息进行一帧一帧的匹配,确保一帧数据对应一帧时间戳,实现了时间戳和数据的匹配。针对imu、激光雷达和rtk,同步驱动板直接将接收来的数据和所对应的时间戳信息进行匹配后发送至工控机,工控机直接对其串行数据包进行解析
即可得到数据以及对应的时间戳信息;另外根据工控机本机时间戳记录无人机飞行状态数据;最终将上述所有传感器数据以及对应时间戳保存至传感器数据高速存储器一260中。工控机240还将全景相机发送的图像通过无线数传单元实时传输至地面控制单元310中。
83.同步驱动板串行传输至工控机的时间戳为秒时间脉冲触发激光雷达时的世界标准时间,频率为1 hz,激光雷达通过网口传输至工控机的点云数据附带的时间戳为从激光雷达开机时开始计算的,频率为10 hz。为了保证激光雷达点云数据与其他传感器之间的时间同步性,工控机将结合同步驱动板传输的激光雷达同步触发信号时间戳以及网口传输的激光雷达内置的时间戳获取每一帧激光雷达数据的真实世界标准时间戳。
84.无线数传单元250为高速数据传输单元,其支持fdd-lte、tdd-lte、gprs/edge标准,使用gprs频段时下行速率为85.6kbps,上行速率为86.6kbps,用于工控机与地面控制单元之间的高速通信。下行数据(飞行系统到地面控制单元的数据)包括无人机实时图像信号和无人机实时飞行参数数据,用于辅助地面操作人员对无人机进行操控。上行数据(地面控制单元到飞行系统的数据)为地面控制信号,包括对无人机飞行状态的控制和传感器工作状态的控制。
85.地面端数控子系统300包括地面控制单元310、rtk地面基站320、传感器数据高速存储器二330和高性能服务器340。
86.地面控制单元310通过无线数传与无人机进行交互,通过无线数传单元完成地面端数控子系统与无人机上多传感融合测量子系统的通讯。
87.rtk地面基站320用于接收卫星信号为机上rtk传感器提供基站信号生成差分数据从而生成精准的三维位置信息。rtk数据除了用于slam算法计算无人机位姿,还产生秒脉冲并传递到同步驱动板,用于imu和lidar的时间同步。
88.传感器数据高速数据存储器二330用于无损地存储工控机传输的无人机实时飞行状态数据以及工控机传输的多传感器同步数据以及其对应的时间戳。
89.高性能服务器340用于读取传感器高速存储器的无人机实时飞行状态数据以及工控机传输的多传感器同步数据,对采集过程的有效性进行判断,并进行后续的高精度算法处理过程。高性能服务器可搭载slam算法,利用多传感融合测量子系统采集的数据算得到位姿并对周边环境进行三维重建。
90.另外,工控机还能结合lidar数据和imu数据完成对lidar点云的运动畸变补偿。由于激光雷达的运动,导致采样点每次测量的雷达坐标系不一致的问题,因此需利用工控机将该帧点云全部投影到共同的激光雷达坐标系。由于imu高频率,使得一帧点云内有许多imu数据。利用imu数据与imu运动模型可以进行机体状态量的递推,即机体的位置、姿态。同时,由于激光雷达的高采样率,两帧imu数据之间有多个点云数据。利用它们的时间戳进行插值,得到每一个激光采样点相对于该帧点云的最后一个点的相对位姿,并投影至最后一个点所在的激光雷达坐标系,即可完成点云的运动畸变校正。
91.如图2所示为利用本系统对基建设施进行测量时的工作原理图,无人机系统依据初次路径规划搭载的传感器采集数据,并通过无人机机载工控机内置的ros系统录制飞行时的rosbag,rosbag实时保存在内部高速存储器中,在无人机完成采集降落后,将高速存储器拔插到地面服务器中,地面服务器通过调取高速存储器中的rosbag数据运行后续各种解算算法。
92.如图3所示为同步采集数据处理的流程示意图,其包括以下子步骤:a)地面控制单元通过机上无线数传单元向多旋翼无人机平台传输地面控制信号,以进行无人机的飞行控制和数据同步采集处理控制。待无人机稳定飞行后,地面控制单元通过无线数传单元控制工控机向同步驱动板发送请求信号,同步驱动板接收到工控机的请求信号后开始进行多传感器的同步数据采集处理。
93.b)gnss高精度授时单元获取来自卫星的精确时间信息,基于此产生不稳定的秒时间脉冲和推荐定位信息,并传输至同步驱动板。同步驱动板接收到gnss高精度授时单元传输的推荐定位信息后,将解析并提取出世界标准时间,由同步驱动板打好标签后存放于其内部预设的第三存放区。
94.c)同步驱动板通过内部时钟校准单元生成稳定的秒时间脉冲,针对imu、激光测距仪、rtk产生各自的同步触发指令并记录对应的时间戳,并在同步驱动板内部将对应的数据与时间戳拼接好,存放在预设的第二存放区;同步驱动板针对全局相机、全景相机、激光雷达产生各自的同步脉冲并记录对应的时间戳,存放在预设的第一存放区,产生的图像数据与点云数据直接传输至工控机。
95.具体来讲,一方面同步驱动板在接收到gnss高精度授时单元产生的秒时间脉冲的同时,通过内部时钟校准模块校准后生成稳定的秒时间脉冲,并针对imu、激光测距仪、rtk产生各自的同步触发指令并记录同步触发指令所对应的时间戳。imu根据同步驱动板的触发指令开始采集无人机运动和姿态数据;激光测距仪根据同步驱动板的指令开始采集点距离数据;rtk根据同步驱动板的指令开始采集机体绝对位置数据。同步驱动板解析来自imu、激光测距仪、rtk的数据包,将解析好的数据与对应同步触发指令的时间戳拼接好,按传感器类型打好标签,并按标签将拼接好的数据存放于内部预设的第二存放区内。
96.另一方面,同步驱动板在接收到gnss传输的原始秒时间脉冲的同时,将通过内部的时钟校准模块对其进行校准,并将校准后稳定的pps脉冲发送给全局相机、全景相机以及激光雷达。全局相机和全景相机以及激光雷达在接收到校准后的秒时间脉冲后,将开始分别采集图像数据和点云数据。其中,全景相机的图像数据通过工控机传输至无线数传单元,最终于地面端的地面控制单元实时显示,以辅助地面操作人员对无人机进行操控。全局相机的图像数据通过usb传输至工控机,激光雷达的点云数据通过网口传输至工控机,由工控机将图像数据和点云数据与来自同步驱动板的触发信号时间戳进行一帧一帧的匹配,确保一帧数据对应一帧时间戳后无损地存储于传感器数据高速存储器中。
97.d)同步驱动板将三个存放区内的世界标准时间、imu数据与时间戳、激光测距仪数据与时间戳、rtk数据与时间戳以及全局相机、全景相机、激光雷达三者的时间戳串行地传输至工控机进行进一步处理。
98.e)针对全局相机、全景相机以及激光雷达,工控机将同步驱动板传输的三者时间戳分别于图像数据与点云数据一帧一帧的进行匹配,确保匹配无误后与同步驱动板传输的已同步好的传感器数据一起无损地存储于传感器数据高速存储器。
99.f)飞行结束后待传感器数据高速存储器冷拔插至地面高性能服务器,高性能服务器读取高同步精度地数据并进行后续处理。
100.待多旋翼无人机飞行过程结束后,传感器数据高速存储器无损地存储了同步驱动板与工控机处理好的传感器高精度同步数据,将存储器由工控机冷拔插至所述地面高性能
服务器。高性能服务器读取无人机实时飞行状态数据以及多传感器同步数据,依据实时飞行状态数据判断数据采集过程是否有效,并对多传感器同步数据进行进一步的算法处理,实现基建设施的高精度检测工作。
101.判断自动飞行状态数据是否正常,如果异常则进入人工模式介入飞行任务;否则由地面高性能服务器预置的slam算法以及多传感融合测量子系统回传的数据进行待测环境与待测目标三维高精地图的构建。
102.无线数传单元接收无人机平台反馈的实时飞行参数信息,同时还获取由工控机传输的全景相机实时图像数据,并将上述数据传输至地面端数控子系统。地面操作人员根据无人机平台的实时飞行数据和全景相机的实时图像数据判断无人机同步数据采集过程是否存在安全隐患,必要时停止无人机数据采集工作。
103.待多旋翼无人机飞行过程结束后,传感器数据高速存储器无损地存储了同步驱动板与工控机处理好的传感器高精度同步数据,将存储器由工控机冷拔插至所述地面高性能服务器。高性能服务器读取无人机实时飞行状态数据以及多传感器同步数据,依据实时飞行状态数据判断数据采集过程是否有效,并对多传感器同步数据进行进一步的算法处理,实现基建设施的高精度检测工作。
104.需要说明的是,gnss高精度授时单元所产生的秒时间脉冲不稳定,可能出现信号消失等问题,为解决此问题,触发第一多传感器模组(例如,激光雷达)开始采集的同步脉冲与gnss高精度授时单元产生的秒时间脉冲之间设置了一定延时时间dt。而且,第一多传感器模组(例如,激光雷达)的内部采集时间并不是世界标准时间,而是传感器自身内部从0开始的时间戳,这与同步驱动板的时间系不同,故需要对第一多传感器模组(例如,激光雷达)返回给工控机的时间戳进行校准,校准成于与第二多传感器模组同步的时间系。
105.因此,实现第一多传感器模组(例如,激光雷达)与第二多传感器模组中其他传感器时间同步的核心在于:利用同步驱动板内部时间系的世界标准时间以及第一多传感器模组(例如,激光雷达)时间系的内部时间戳来求解每一帧第一多传感器模组采集数据的真实时间戳。
106.以激光雷达与其他传感器的时间同步为例,如图4所示,激光雷达与其他传感器的时间同步流程如下:ⅰ)从同步驱动板每秒刷新世界标准时间tf,从激光雷达以10hz刷新每个数据帧对应的时间戳t1。
[0107]ⅱ)记录同步驱动板刷新时刻对应的工控机时间戳t
f_pc
,以及,记录激光雷达刷新时刻对应的工控机时间戳t
l_pc
。
[0108]ⅲ)启动工控机的时间核对低速定时器任务(例如,每秒25hz),并确认定时器是否触发,若是,则计算此刻同步驱动板时间系时间tf=(t
pc-t
f_pc
) tf,以及计算此刻激光雷达时间系时间t
l
=(t
pc-t
l_pc
) t
l
。
[0109]ⅳ)从同步驱动板接收校准延时dt,并计算同步驱动板时间系的起点世界标准时间t0=t
f-t1 dt。
[0110]
ⅴ
)计算准确的激光雷达数据帧的时刻t1对应的同步驱动板时间系t
1_real
=t1 dt t0。
[0111]
综上所述,本发明的有益效果包括:
(1)本发明的测量系统能够自动化、智能化、低成本、高精度的对桥梁、大坝、能源等基建设施工程的安全状况进行定期检测与测量;(2)本发明的测量方法相比于传统的基建设施测量方法节省了大量的人力物力,操作流程简明方便,且不具备安全隐患,适用于特大型基建设施的精密测量工作;(3)本发明可实现精密、直观的测量效果,有效提高检修人员的工作效率,为基建设施提供健康状态监测;(4)本发明能够解决现有数据采集方法传感器数据同步精度不足而导致的基建设施检测效果不佳的问题以及传感器数据量过大无法在线高质量处理而导致采集数据畸变矫正失败,影响算法重建效果,从而影响检测结果的问题。
[0112]
尽管上面已经结合示例性实施例及附图描述了本发明,但是本领域普通技术人员应该清楚,在不脱离权利要求的精神和范围的情况下,可以对上述实施例进行各种修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。