1.本发明涉及阀门控制技术领域,尤其公开了一种用于控制水阀、气阀等的一体式智能阀门控制器。
背景技术:
2.在现代过程控制领域中,执行机构是必不可少的部分,从早先的手动、气动执行器到现在的电动执行器,在不同的控制场所都得到了广泛的应用。电动执行机构广泛应用于石油、化工和电力等领域。电动阀简单地说就是用电动执行器。电动阀用于控制阀门,从而实现阀门的开和关。其可分为上下两部分,上半部分为电动执行器,下半部分为阀门。电动阀通常由电动执行机构和阀门组成。电动阀使用电能作为动力来通过电动执行机构来驱动阀门,实现阀门的开关动作,从而达到对管道介质的开关目的。然而,现有电动阀控制方式单一且操作不方便。
3.因此,现有电动阀控制方式单一且操作不方便,是目前亟待解决的技术问题。
技术实现要素:
4.本发明提供了一种一体式智能阀门控制器,旨在解决现有电动阀控制方式单一且操作不方便的技术问题。
5.本发明涉及一种一体式智能阀门控制器,包括上壳体、下壳体、电动驱动机构、手动驱动机构、传动机构和球阀,上壳体与下壳体相配合以形成腔体,电动驱动机构和手动驱动机构设于腔体内,传动机构的一端分别与电动驱动机构和手动驱动机构相连接,传动机构的另一端穿过下壳体后与球阀相连接,电动驱动机构包括控制电路板和驱动电机,控制电路板包括无线通信模块、控制器和电机正反转控制电路,其中,无线通信模块,用于接收移动终端无线发送过来的控制数据;控制器与无线通信模块电连接,用于收集无线通信模块接收的控制数据,向电机正反转控制电路发出控制指令;电机正反转控制电路分别与控制器和驱动电机电连接,用于按照控制器发出的控制指令,输出高低电平,以控制驱动电机正反转,实现球阀的开合。
6.进一步地,电机正反转控制电路包括第一开关二极管、第二开关二极管、第一开关三极管、第二开关三极管、第三开关三极管、第四开关三极管、第五开关三极管、第六开关三极管、第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电阻、第七电阻、第八电阻、第九电阻、第十电阻、第十一电阻和第十二电阻,第一开关二极管的正极与控制器的第12引脚电连接,第一开关二极管的负极分为两路,一路通过第一电阻与第一开关三极管的基极电连接,另一路通过第二电阻第二开关三极管的基极电连接;第二开关二极管的正极与控制器的第11引脚电连接,第二开关二极管的负极分为两路,一路通过第三电阻与第二开关三极管的基极电连接,另一路通过第四电阻与第四开关三极管的基极电连接;第一开关三极管的集电极与第三开关三极管的集电极电连接,第一开关三极管的发射极接地,第三开关三极管的发射极接地;第二开关三极管的集电极通过第五电阻与第五开关三极管的基极
电连接,第二开关三极管的发射极分为两路,一路与第六开关三极管的基极电连接,另一路通过六电阻接地;第四开关三极管的集电极通过第七电阻与第七开关三极管的基极电连接,第四开关三极管的发射极分为两路,一路与第八开关三极管的基极电连接,另一路通过第八电阻接地;第五开关三极管的集电极通过第九电阻与第五开关三极管的基极电连接,第五开关三极管的发射极与驱动电机的正极电连接;第六开关三极管的集电极与驱动电机的负极电连接,第六开关三极管的发射极通过第十电阻接地;第七开关三极管的集电极通过第十一电阻与第八开关三极管的基极电连接,第七开关三极管的发射极与驱动电机的负极电连接;第八开关三极管的集电极与驱动电机的正极电连接,第八开关三极管的发射极通过第十二电阻接地。
7.进一步地,无线通信模块包括lte模块、wifi模块和射频rf模块,lte模块包括lte芯片,lte芯片的型号为bc260y-cn;wifi模块包括wifi芯片,wifi芯片的型号为tywe3s;射频rf模块包括射频rf芯片,射频rf芯片的型号为rf433m;lte芯片与控制器的第15引脚电连接,射频rf芯片与控制器的第16引脚电连接,wifi芯片分别与控制器的第13引脚和第14引脚电连接。
8.进一步地,电动驱动机构还包括声光提醒电路,声光提醒电路包括工作电压、第十三电阻、第十四电阻、第九开关三极管、蜂鸣器、报警指示灯、故障指示灯和电源指示灯,控制器的第1引脚通过第十三电阻与第九开关三极管的基极电连接,第九开关三极管的集电极与蜂鸣器电连接,第九开关三极管的发射极接地;工作电压通过第十四电阻分别与报警指示灯、故障指示灯和电源指示灯的阳极电连接,报警指示灯的阴极与控制器的第4引脚电连接,故障指示灯的阴极与控制器的第5引脚电连接,电源指示灯的阴极与控制器的第7引脚电连接。
9.进一步地,电动驱动机构还包括电机反转按键、电机正转按键和学习按键,控制器的第3引脚分别与电机反转按键、电机正转按键和学习按键电连接。
10.进一步地,传动机构包括第一齿轮、第二齿轮和上下连接杆,第一齿轮套设于驱动电机的主轴内,第二齿轮与第一齿轮相啮合,上下连接杆的一端与第二齿轮相连接,上下连接杆的另一端与球阀相连接。
11.进一步地,手动驱动机构包括上部按钮、连接片、第三齿轮和齿轮连接杆,上部按钮的一端贯穿上壳体并伸出上壳体外,上部按钮的另一端通过连接片与齿轮连接杆相连接,第三齿轮套设于齿轮连接杆上,第二齿轮与第一齿轮之间通过第三齿轮相啮合连接,齿轮连接杆用于在上部按钮的作用力下上下移动,促使第一齿轮与第二齿轮相啮合或相脱离,以手动带动球阀动作。
12.进一步地,下壳体上设有容纳腔,手动驱动机构还包括弹簧,齿轮连接杆的下方设有止挡部,弹簧的一端套设于止挡部上,弹簧的另一端抵接于容纳腔的内壁上。
13.进一步地,手动驱动机构还包括手动拨杆和连接套,第二齿轮为半弧形齿轮,上下连接杆和第二齿轮之间通过连接套相连接,连接套设于下壳体内,下壳体上开设有拨动槽,手动拨杆穿过拨动槽后与连接套固定连接,手动拨杆用于在作用力下沿连接套的径向旋转,驱使上下连接杆做旋转运动,以手动控制球阀开合。
14.进一步地,球阀包括止水胶圈、防水圈、卡簧、通用螺母、止水钢球、球阀主体和球阀主体螺母,通用螺母与球阀主体的顶部通过螺纹相连接,卡簧卡接于下壳体的底部与通
用螺母之间,多个防水圈套设于上下连接杆上,止水钢球设于球阀主体内且通过球阀主体螺母相盖合,上下连接杆的下端与止水钢球相卡接,两个止水胶圈分别设于止水钢球的两侧。
15.本发明所取得的有益效果为:本发明提供一种一体式智能阀门控制器,采用上壳体、下壳体、电动驱动机构、手动驱动机构、传动机构和球阀,上壳体与下壳体相配合以形成腔体,电动驱动机构和手动驱动机构设于腔体内,传动机构的一端分别与电动驱动机构和手动驱动机构相连接,传动机构的另一端穿过下壳体后与球阀相连接,电动驱动机构包括控制电路板和驱动电机,控制电路板包括无线通信模块、控制器和电机正反转控制电路,其中,无线通信模块,用于接收移动终端无线发送过来的控制数据;控制器与无线通信模块电连接,用于收集无线通信模块接收的控制数据,向电机正反转控制电路发出控制指令;电机正反转控制电路分别与控制器和驱动电机电连接,用于按照控制器发出的控制指令,输出高低电平,以控制驱动电机正反转,实现球阀的开合。本发明提供的一体式智能阀门控制器,智能化程度高,可实现远程操控;控制方式多,可通过自动和手动方式进行球阀的开合控制,大大增加了人们对于水阀、气阀使用的方便及智能化需求。
附图说明
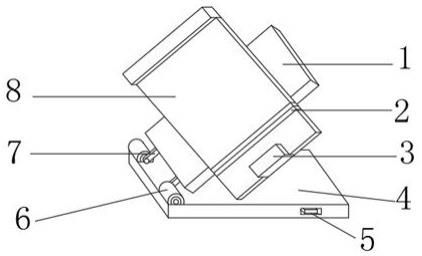
16.图1为本发明提供的一体式智能阀门控制器第一实施例第一视图的立体结构示意图;图2为本发明提供的一体式智能阀门控制器第一实施例第二视图的立体结构示意图;图3为本发明提供的一体式智能阀门控制器一实施例的爆炸示意图;图4为本发明提供的一体式智能阀门控制器一实施例的电路结构示意图;图5为本发明提供的一体式智能阀门控制器第二实施例第一视图的立体结构示意图;图6为本发明提供的一体式智能阀门控制器第二实施例第二视图的立体结构示意图;图7为本发明提供的一体式智能阀门控制器第二实施例的俯视图;图8为图7中沿a-a方向的剖面示意图;图9为图7中沿c-c方向的剖面示意图;图10为本发明提供的一体式智能阀门控制器第三实施例第一视角的内部立体结构示意图;图11为本发明提供的一体式智能阀门控制器第三实施例第二视角的内部立体结构示意图;图12为本发明提供的一体式智能阀门控制器第三实施例第三视角的内部立体结构示意图;图13为本发明提供的一体式智能阀门控制器第三实施例第四视角的内部立体结构示意图;图14为本发明提供的一体式智能阀门控制器第三实施例第四视角的内部立体结
构示意图。
17.附图标号说明:10、上壳体;20、下壳体;30、电动驱动机构;40、手动驱动机构;50、传动机构;60、球阀;31、控制电路板;32、驱动电机;311、无线通信模块;312、控制器;313、电机正反转控制电路;314、声光提醒电路;315、电机反转按键;316、电机正转按键;317、学习按键;51、第一齿轮;52、第二齿轮;53、上下连接杆;41、上部按钮;42、连接片;43、第三齿轮;44、齿轮连接杆;21、容纳腔;441、弹簧;442、止挡部;45、手动拨杆;46、连接套;531、拨动槽;61、止水胶圈;62、防水圈;63、卡簧;64、通用螺母;65、止水钢球;66、球阀主体;67、球阀主体螺母。
具体实施方式
18.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
19.如图1到图4所示,本发明第一实施例提出一种一体式智能阀门控制器,包括上壳体10、下壳体20、电动驱动机构30、手动驱动机构40、传动机构50和球阀60,上壳体10与下壳体20相配合以形成腔体,电动驱动机构30和手动驱动机构40设于腔体内,传动机构50的一端分别与电动驱动机构30和手动驱动机构40相连接,传动机构50的另一端穿过下壳体20后与球阀60相连接,电动驱动机构30包括控制电路板31和驱动电机32,控制电路板31包括无线通信模块311、控制器312和电机正反转控制电路313,其中,无线通信模块311,用于接收移动终端无线发送过来的控制数据;控制器312与无线通信模块311电连接,用于收集无线通信模块311接收的控制数据,向电机正反转控制电路313发出控制指令;电机正反转控制电路313分别与控制器312和驱动电机32电连接,用于按照控制器312发出的控制指令,输出高低电平,以控制驱动电机32正反转,实现球阀60的开合。在本实施例中,控制器312可采用单片机或可编程逻辑控制器。无线通信模块311可采用3g/4g/5g模块,也可以采用wifi模块、蓝牙模块等,均在本专利的保护范围之内。
20.进一步地,请见图1至图4,本实施例提供的一体式智能阀门控制器,电机正反转控制电路313包括第一开关二极管d1、第二开关二极管d2、第一开关三极管t1、第二开关三极管t2、第三开关三极管t3、第四开关三极管t4、第五开关三极管t5、第六开关三极管t6、第一电阻r1、第二电阻r2、第三电阻r3、第四电阻r4、第五电阻r5、第六电阻r6、第七电阻r7、第八电阻r8、第九电阻r9、第十电阻r10、第十一电阻r11和第十二电阻r12,第一开关二极管d1的正极与控制器312的第12引脚电连接,第一开关二极管d1的负极分为两路,一路通过第一电阻r1与第一开关三极管t1的基极电连接,另一路通过第二电阻r2第二开关三极管t2的基极电连接;第二开关二极管d2的正极与控制器312的第11引脚电连接,第二开关二极管d2的负极分为两路,一路通过第三电阻r3与第二开关三极管t2的基极电连接,另一路通过第四电阻r4与第四开关三极管t4的基极电连接;第一开关三极管t1的集电极与第三开关三极管t3的集电极电连接,第一开关三极管t1的发射极接地,第三开关三极管t3的发射极接地;第二开关三极管t2的集电极通过第五电阻r5与第五开关三极管t5的基极电连接,第二开关三极管t2的发射极分为两路,一路与第六开关三极管t6的基极电连接,另一路通过六电阻r6接地;第四开关三极管t4的集电极通过第七电阻r7与第七开关三极管t7的基极电连接,第四开关三极管t4的发射极分为两路,一路与第八开关三极管t8的基极电连接,另一路通过第
八电阻r8接地;第五开关三极管t5的集电极通过第九电阻r9与第五开关三极管t5的基极电连接,第五开关三极管t5的发射极与驱动电机32的正极电连接;第六开关三极管t6的集电极与驱动电机32的负极电连接,第六开关三极管t6的发射极通过第十电阻r10接地;第七开关三极管t7的集电极通过第十一电阻r11与第八开关三极管t8的基极电连接,第七开关三极管t7的发射极与驱动电机32的负极电连接;第八开关三极管t8的集电极与驱动电机32的正极电连接,第八开关三极管t8的发射极通过第十二电阻r12接地。在本实施例中,第一开关二极管d1和第二开关二极管d2采用4148二极管。第一开关三极管t1、第二开关三极管t2、第三开关三极管t3和第四开关三极管t4采用8050三极管。第五开关三极管t5和第六开关三极管t6采用b772三极管。第七开关三极管t7和第八开关三极管t8采用d882三极管。在本实施例中,当控制器312的第11引脚输出高电平、而第12引脚输出低电平时,第一开关三极管t1和第二开关三极管t2截止,第三开关三极管t3和第四开关三极管t4导通,促使第八开关三极管t8导通,进而第六开关三极管t6基极为低电平时第六开关三极管t6导通,此时,直流电通过导通的第四开关三极管t4和第八开关三极管t8,从驱动电机32的正极进入,从驱动电机32的负极出,驱动电机32正转运行。当控制器312的第11引脚输出低电平、而第12引脚输出高电平时,第一开关三极管t1和第二开关三极管t2导通,第三开关三极管t3和第四开关三极管t4截止,促使第六开关三极管t6导通,进而第八开关三极管t8基极为低电平时第八开关三极管t8导通,此时,直流电通过导通的第二开关三极管t2和第六开关三极管t6,从驱动电机32的负极进入,从驱动电机32的正极出,驱动电机32反转运行。当控制器312的第11引脚和第12引脚均输出低电平时,第一开关三极管t1、第二开关三极管t2、第三开关三极管t3和第四开关三极管t4均截止,促使第八开关三极管t8截止,驱动电机32停止。当控制器312的第11引脚和第12引脚均输出高电平时,第一开关三极管t1、第二开关三极管t2、第三开关三极管t3和第四开关三极管t4均导通,促使第八开关三极管t8导通,进而第六开关三极管t6基极为高电平时第六开关三极管t6截止,驱动电机32停止。本实施例提供的一体式智能阀门控制器,通过控制器来输出高低电平和电机正反转控制电路313的开关控制,以控制驱动电机32正反转,实现球阀60自动开合,智能化程度高。
21.优选地,参见图1至图14,本实施例提供的一体式智能阀门控制器,无线通信模块311包括lte模块、wifi模块和射频rf模块,lte模块包括lte芯片,lte芯片的型号为bc260y-cn;wifi模块包括wifi芯片,wifi芯片的型号为tywe3s;射频rf模块包括射频rf芯片,射频rf芯片的型号为rf433m;lte芯片与控制器312的第15引脚电连接,射频rf芯片与控制器312的第16引脚电连接,wifi芯片分别与控制器312的第13引脚和第14引脚电连接。本实施例提供的一体式智能阀门控制器,通过无线通信模块311来接收移动终端无线发送过来的控制数据,以控制驱动电机32正反转,实现球阀60自动开合,智能化程度高。
22.进一步地,请见图1至图14,本实施例提供的一体式智能阀门控制器,电动驱动机构30还包括声光提醒电路314,声光提醒电路314包括工作电压、第十三电阻r13、第十四电阻r14、第九开关三极管t9、蜂鸣器buz、报警指示灯d3、故障指示灯d4和电源指示灯d5,控制器312的第1引脚通过第十三电阻r13与第九开关三极管t9的基极电连接,第九开关三极管t9的集电极与蜂鸣器buz电连接,第九开关三极管t9的发射极接地;工作电压vcc通过第十四电阻r14分别与报警指示灯d3、故障指示灯灯d4和电源指示灯d5的阳极电连接,报警指示灯d3的阴极与控制器312的第4引脚电连接,故障指示灯d4的阴极与控制器312的第5引脚电
连接,电源指示灯d5的阴极与控制器312的第7引脚电连接。在本实施例中,第九开关三极管t9采用8060三极管。本实施例提供的一体式智能阀门控制器,通过声光提醒电路314来进行报警指示、故障指示和电源指示,自动化程度高。
23.优选地,请见图1至图14,本实施例提供的一体式智能阀门控制器,电动驱动机构30还包括电机反转按键315、电机正转按键316和学习按键317,控制器312的第3引脚分别与电机反转按键315、电机正转按键316和学习按键317电连接。本实施例提供的一体式智能阀门控制器,通过设置的电机反转按键315、电机正转按键316和学习按键317分别来完成智能阀门控制器的电机正反转和学习,自动化程度高,操控方便。
24.进一步地,参见图1至图14,本实施例提供的一体式智能阀门控制器,传动机构50包括第一齿轮51、第二齿轮52和上下连接杆53,第一齿轮51套设于驱动电机32的主轴内,第二齿轮52与第一齿轮51相啮合,上下连接杆53的一端与第二齿轮52相连接,上下连接杆53的另一端与球阀60相连接。本实施例提供的一体式智能阀门控制器,通过相互啮合的齿轮和传动轴来完成传动,自动化程度高。
25.优选地,参见图1至图14,本实施例提供的一体式智能阀门控制器,手动驱动机构40包括上部按钮41、连接片42、第三齿轮43和齿轮连接杆44,上部按钮41的一端贯穿上壳体10并伸出上壳体10外,上部按钮41的另一端通过连接片42与齿轮连接杆44相连接,第三齿轮43套设于齿轮连接杆44上,第二齿轮52与第一齿轮51之间通过第三齿轮43相啮合连接,齿轮连接杆44用于在上部按钮41的作用力下上下移动,促使第三齿轮43与第二齿轮52相啮合或相脱离,以手动带动球阀60动作。具体地,下壳体20上设有容纳腔21,手动驱动机构40还包括弹簧441,齿轮连接杆44的下方设有止挡部442,弹簧441的一端套设于止挡部442上,弹簧441的另一端抵接于容纳腔21的内壁上。本实施例提供的一体式智能阀门控制器,可通过手动方式进行球阀的开合控制,大大增加了人们对于水阀、气阀使用的方便。
26.进一步地,请见图1至图14,本实施例提供的一体式智能阀门控制器,手动驱动机构40还包括手动拨杆45和连接套46,第二齿轮52为半弧形齿轮,上下连接杆53和第二齿轮52之间通过连接套46相连接,连接套46设于下壳体20内,下壳体20上开设有拨动槽531,手动拨杆45穿过拨动槽531后与连接套46固定连接,手动拨杆45用于在作用力下沿连接套46的径向旋转,驱使上下连接杆53做旋转运动,以手动控制球阀60开合。本实施例提供的一体式智能阀门控制器,可通过手动方式进行球阀的开合控制,大大增加了人们对于水阀、气阀使用的方便。
27.优选地,请见图1至图14,本实施例提供的一体式智能阀门控制器,球阀60包括止水胶圈61、防水圈62、卡簧63、通用螺母64、止水钢球65、球阀主体66和球阀主体螺母67,通用螺母64与球阀主体66的顶部通过螺纹相连接,卡簧63卡接于下壳体20的底部与通用螺母64之间,多个防水圈62套设于上下连接杆53上,止水钢球65设于球阀主体66内且通过球阀主体螺母67相盖合,上下连接杆53的下端与止水钢球65相卡接,两个止水胶圈61分别设于止水钢球65的两侧。,本实施例提供的一体式智能阀门控制器,密封性高且操作方便,大大提高生产效率和减低人力成本。
28.如图1至图14所示,本实施例提供的一体式智能阀门控制器,其工作原理为:当外部驱动器输出驱动电机32需要的电源,驱动电机32驱动运行,上半部分电动阀门控制器内传动轴带动上下连接轴,从而带动下半部分一体式球阀的打开或关闭,所设
的手动拨杆45也可以在停电及检修时满足手动控制的需要,需要手动控制的时候,按下外壳顶部的上部按钮41,手动拨杆45顺时针旋转90
°
,可以控制智能阀门控制器的关闭;再逆时针旋转90
°
,就可以控制智能阀门控制器的打开。具体地,驱动电机32带动第一齿轮51、第二齿轮52、连接套46和上下连接杆53动作,进而控制球阀主体66的开合。上部按钮41通过连接片17来带动第三齿轮43和齿轮连接杆44动作,促使第一齿轮51与第二齿轮52相啮合或相脱离,以手动带动球阀60动作。通过手动拨杆45可以手动控制齿轮的正反转,达到手动控制球阀的开合作用。下部球阀60可以为dn15-dn50,通过连接套46和上部执行器连接,通过通用螺母64和卡簧63的相互配合来进行上下部的锁扣。
29.控制电路板31的电路部分集成了无线射频rf433、wifi、nb-iot、以及电池款等智能化需求,需要哪一种驱动方式就可选择哪一种电路需求。
30.12v直流供电,经过二极管整流和asm1117-3.3v稳压输出3.3v,通过电解电容c1和tvs二极管,保证bc260y-cn模块vbat引脚电压在正常范围内,bc260y-cn模块rf_ant天线引脚通过0r电阻,两个对地电容100nf天线发射头上。bc260y-cn模块的usim data rst clk vdd对应接入sim卡上,保证4g卡能正常与该模块正常连接。当报警器浓度超标报警发出信号时,rf433模块收到信号后,传入单片机ic1处理,将先通过rx和tx串口送往nb模块的txd和rxd数据口发送出去,再由单片机ic1的p11引脚和p12引脚输出高低电平,控制、驱动电机32正反转。蜂鸣器buz在rf433模块收到报警后,会di di 200ms电平持续翻转。当驱动电机32正转或反转时,蜂鸣器buz会di di两声,提示驱动电机32准备运转。当按下电机反转按键k1,驱动电机32反转。当电机正转按键k2按下,驱动电机32正转。当学习按键k3按下2s松手,进入rf433模块学码,学码ok后,led绿灯闪烁3下。正常状态下,电源灯常亮,当报警时,报警灯200ms翻转闪烁。当nb模块通讯异常时,故障灯亮起。inter_接口,用于烧录单片机程序用。
31.本实施例提供的一体式智能阀门控制器,同现有技术相比,采用上壳体、下壳体、电动驱动机构、手动驱动机构、传动机构和球阀,上壳体与下壳体相配合以形成腔体,电动驱动机构和手动驱动机构设于腔体内,传动机构的一端分别与电动驱动机构和手动驱动机构相连接,传动机构的另一端穿过下壳体后与球阀相连接,电动驱动机构包括控制电路板和驱动电机,控制电路板包括无线通信模块、控制器和电机正反转控制电路,其中,无线通信模块,用于接收移动终端无线发送过来的控制数据;控制器与无线通信模块电连接,用于收集无线通信模块接收的控制数据,向电机正反转控制电路发出控制指令;电机正反转控制电路分别与控制器和驱动电机电连接,用于按照控制器发出的控制指令,输出高低电平,以控制驱动电机正反转,实现球阀的开合。本实施例提供的一体式智能阀门控制器,智能化程度高,可实现远程操控;控制方式多,可通过自动和手动方式进行球阀的开合控制,大大增加了人们对于水阀、气阀使用的方便及智能化需求。
32.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。