1.本技术涉及育种技术领域,尤其是涉及一种全自动授粉系统。
背景技术:
2.玉米植株的室内育种过程,需要将雄蕊的花粉撒到雌蕊上,野外环境下,授粉过程可以借助风力和动物来实现,但是在室内环境下,受限于较为封闭的生长环境,导致授粉过程无法正常进行。
技术实现要素:
3.本技术实施例提供一种全自动授粉系统,借助点对点的授粉方式来保证室内育种过程中授粉过程的正常进行。
4.本技术实施例的上述目的是通过以下技术方案得以实现的:本技术实施例提供了一种全自动授粉系统,包括:移动车;第一纵向升降模组和第二纵向升降模组,均设在移动车上;花粉提取单元,设在第一纵向升降模组上;授粉单元,设在和第二纵向升降模组上;引流管道,两端分别与花粉提取单元和授粉单元连接;图像采集单元,设在移动车上;以及控制器,设在移动车上,用于根据图像采集单元的反馈调整花粉提取单元和授粉单元的高度并驱动花粉提取单元和授粉单元工作。
5.在本技术实施例的一种可能的实现方式中,花粉提取单元包括:提取罩,设在第一纵向升降模组上;柔性膨胀体,间隔设在提取罩的内壁上;以及压缩空气单元,设在第一纵向升降模组或者移动车上,压缩空气单元与柔性膨胀体连接;其中,压缩空气单元的一个输出端伸入到引流管道内;引流管道的第一端与提取罩连接,第二端与授粉单元连接。
6.在本技术实施例的一种可能的实现方式中,柔性膨胀体分为两组并分别设在提取罩的一组相对内壁上。
7.在本技术实施例的一种可能的实现方式中,同一组中的柔性膨胀体分为两个分组,两个分组中的柔性膨胀体交替设置且交替进行充放气。
8.在本技术实施例的一种可能的实现方式中,引流管道具有多个输入端,引流管道的多个输入端沿柔性膨胀体的分布方向顺序排列并与提取罩连接。
9.在本技术实施例的一种可能的实现方式中,授粉单元包括:转台,设在第二纵向升降模组上;
授粉罩,设在转台上并与引流管道的第二端连接;密封板,设在授粉罩上,用于开启和关闭授粉罩;以及驱动器,设在授粉罩上,用于驱动密封板。
10.在本技术实施例的一种可能的实现方式中,还包括设在转台上的循环风机,循环风机的输入端和输出端均与授粉罩连接,用于驱动授粉罩内的气体循环流动。
11.在本技术实施例的一种可能的实现方式中,循环风机具有两个输出端,第一个输出端与授粉罩连接,第二个输出端与花粉提取单元连接。
附图说明
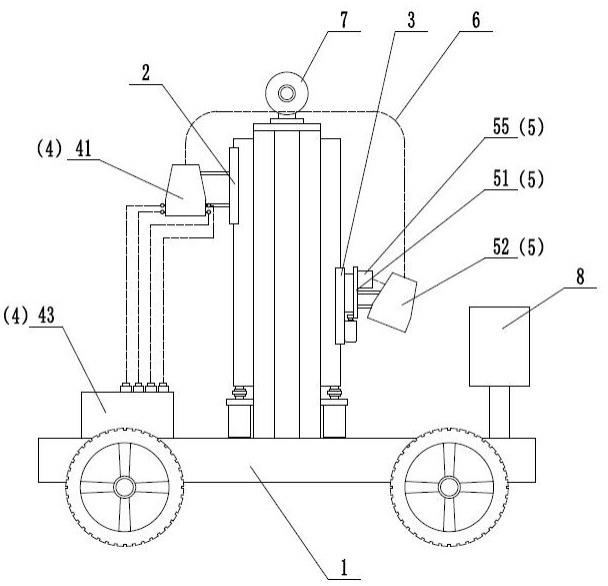
12.图1是本技术实施例提供的一种全自动授粉系统的结构示意图,图中虚线表示气线。
13.图2是玉米植株上雄花和雌花的位置示意图。
14.图3是本技术实施例提供的一种提取罩的外形示意图。
15.图4是本技术实施例提供的一种提取罩的内部示意图,图中虚线表示气线。
16.图5是本技术实施例提供的一种引流管道内气体流动的原理性示意图。
17.图6是本技术实施例提供的一种柔性膨胀体分组且能够交替工作的原理性示意图。
18.图7是本技术实施例提供的一种授粉单元的结构示意图。
19.图8是本技术实施例提供的一种收集花粉时的花粉提取单元和授粉单元的工作原理性示意图。
20.图9是本技术实施例提供的一种授粉时的花粉提取单元和授粉单元的工作原理性示意图。
21.图中,1、移动车,2、第一纵向升降模组,3、第二纵向升降模组,4、花粉提取单元,5、授粉单元,6、引流管道,7、图像采集单元,8、控制器,41、提取罩,42、柔性膨胀体,43、压缩空气单元,51、转台,52、授粉罩,53、密封板,54、驱动器,55、循环风机。
具体实施方式
22.以下结合附图,对本技术中的技术方案作进一步详细说明。
23.请参阅图1,为本技术实施例公开的一种全自动授粉系统,授粉系统由移动车1、第一纵向升降模组2、第二纵向升降模组3、花粉提取单元4、授粉单元5、引流管道6、图像采集单元7和控制器8等组成,移动车1的作用是负责行进,行进由前进、后退和转向三部分组成,具体的行进路线根据内部存储的程序或者收到的指令进行,例如工作人员根据授粉区域编辑移动车1的行驶路线后发送给移动车1的控制端,控制端就会控制移动车1按照行驶路线前进。
24.第一纵向升降模组2和第二纵向升降模组3均固定安装在移动车1上,两个纵向升降模组的作用均是在竖直方向上提供移动,使得花粉提取单元4和授粉单元5能够独立的在竖直方向上移动。
25.在一些可能的实现方式中,第一纵向升降模组2使用线性模组,线性模组中的伺服电机与控制器8连接,根据控制器8下发的指令进行相应的动作。第二纵向升降模组3的结构
与第一纵向升降模组2的结构相同,此处不再赘述。
26.花粉提取单元4安装在第一纵向升降模组2上,能够在第一纵向升降模组2的驱动下在竖直方向上移动。花粉提取单元4在竖直方向上移动的过程中,能够罩在玉米植株的雄蕊上并采集雄蕊上的花粉。
27.授粉单元5安装在第二纵向升降模组3上,能够在第二纵向升降模组3的驱动下在竖直方向上移动。授粉单元5在竖直方向上移动的过程中,能够将花粉提取单元4采集到的花粉洒落到玉米植株的雌蕊上。
28.花粉的运输通过引流管道6实现,引流管道6的两端分别与花粉提取单元4和授粉单元5连接,花粉提取单元4采集到的花粉通过引流管道6送入到授粉单元5内。
29.请参阅图2,玉米植株上雄蕊和雌蕊的位置由安装在移动车1上的图像采集单元7进行判定,图像采集单元7由摄像头和计算模块(或者内置在控制器8中的图像识别算法)组成,摄像头的作用是采集图像,计算模块(或者内置在控制器8中的图像识别算法)的作用是根据图像中的内容将雄蕊和雌蕊识别出来。
30.具体地说,玉米植株的雄蕊位于玉米植株的最高点,对于雄蕊位置的识别,需要在图像中识别出玉米植株的最高点,然后控制花粉提取单元4移动该最高点的上方即可,接下来的花粉收集工作交由花粉提取单元4执行,花粉提取单元4能够将玉米植株的雄蕊罩住后再收集雄蕊上的花粉,这种方式能够消除识别过程中产生的误差。
31.对于玉米植株的雌蕊的识别,通过形状来实现,雌蕊所处位置主要由茎秆、叶片、玉米穗和玉米须四部分组成,玉米须具有明显的特征(数量多、集中在一个位置和颜色区别于茎秆、叶片和玉米穗),主要识别到玉米须的位置,授粉单元5就会下降到玉米须附近人,然后使用吹扫的方式将花粉提取单元4收集到的花粉撒到玉米须上,吹扫具有一定的覆盖面积,能够消除识别过程中产生的误差。
32.移动车1、第一纵向升降模组2、第二纵向升降模组3、花粉提取单元4、授粉单元5和图像采集单元7均与控制器8连接,控制器8安装在移动车1上,此处,移动车1的控制终端可以集成在控制器8中。
33.图像采集单元7实时采集周围环境中的图像并发送给控制器8进行分析,或者自行分析后将结果发送给控制器8,控制器8再控制第一纵向升降模组2和第二纵向升降模组3分别驱动花粉提取单元4和授粉单元5完成玉米植株的授粉工作,整个过程自动进行,不需要人工参与,能够实现室内授粉的无人化和自动化化。
34.请参阅图3和图4,作为申请提供的全自动授粉系统的一种具体实施方式,花粉提取单元4由提取罩41、柔性膨胀体42和压缩空气单元43等组成,提取罩41固定安装在第一纵向升降模组2上,能够随着第一纵向升降模组2在竖直方向上移动。提取罩41的内壁上安装有多个柔性膨胀体42,这些柔性膨胀体42间隔设置。
35.柔性膨胀体42的体积能够增大和缩小,在反复增大和缩小的过程中,柔性膨胀体42能够通过拍打的方式使玉米植株的雄蕊上的花粉脱落,然后再通过抽取的方式将提取罩41内的漂浮的花粉送入到授粉单元5内。
36.在一些可能的实现方式中,柔性膨胀体42使用弹性塑料材料制作。
37.柔性膨胀体42工作时需要的压缩空气由压缩空气单元43提供,压缩空气单元43设置在第一纵向升降模组2或者移动车1上并通过气线与柔性膨胀体42连接。
38.请参阅图5,压缩空气单元43的一个输出端还伸入到引流管道6内,具体而言,在花粉提取单元4内漂浮的花粉向授粉单元5流动的过程中,压缩空气单元43会向引流管道6内注入气体,用于在引流管道6内产生负压,引流管道6内产生负压后,花粉提取单元4内漂浮的花粉就会通过引流管道6流向授粉单元5。
39.压缩空气单元43由气泵、储气罐、气阀和气线四部分组成,气泵的作用是产生压缩空气,储气罐的作用是存储气泵产生的压缩空气,气线的作用是将柔性膨胀体42与储气罐连接起来,气阀安装在气线上,作用是控制气线的通断。
40.气阀上具有两个通道,分别为充气通道和放气通道,柔性膨胀体42体积增大时,压缩空气通过充气通道流入到柔性膨胀体42内,柔性膨胀体42体积缩小时,柔性膨胀体42内的气体通过放气通道流出。
41.柔性膨胀体42体积的增大和缩小如果同步进行,可以使用一根气线同时与全部的柔性膨胀体42连接;柔性膨胀体42体积的增大和缩小如果异步进行,可以先将柔性膨胀体42分为多组,一组中的多个柔性膨胀体42与一根气线连接,请参阅图6。
42.进一步地,柔性膨胀体42分为两组并分别设在提取罩41的一组相对内壁上,此处主要考虑到玉米植株是按照队列的形式进行种植,提取罩41的形状可以做成矩形,这样就能够对一排或者一列玉米植株同时进行授粉。
43.更进一步地,同一组中的柔性膨胀体42分为两个分组,两个分组中的柔性膨胀体42交替设置且交替进行充放气。
44.在一些可能的实现方式中,引流管道6具有多个输入端,引流管道6的多个输入端沿柔性膨胀体42的分布方向顺序排列并与提取罩41连接,通过多个输入端同时抽取提取罩41内的气体,可以快速的将提取罩41内漂浮的花粉收集起来后送入到授粉单元5。
45.请参阅图7,作为申请提供的全自动授粉系统的一种具体实施方式,授粉单元5由转台51、授粉罩52、密封板53和驱动器54等组成,转台51安装在第二纵向升降模组3上,作用是带动安装在其上的授粉罩52在竖直方向上转动。
46.应理解,授粉罩52工作时需要由竖直姿态变为水平姿态,完成后需要再次切换到竖直姿态,这样才能够绕过已经授粉的玉米植株,授粉罩52的姿态转换需要借助转台51来实现。
47.密封板53安装在授粉罩52上,用于开启和关闭授粉罩52,授粉罩52关闭时,收集到的花粉被送入到授粉罩52内并在气流的吹动下均匀分布到授粉罩52内的空间中,该过程中授粉罩52内的气压会适当增大。
48.密封板53开启时,在气流的推动下,授粉罩52内的花粉会快速流出并洒落到下方的玉米须(雌蕊)上。
49.密封板53的转动或者移动由驱动器54实现,密封板53以转动的方式实现开启和关闭时,驱动器54使用电机,密封板53以移动的方式实现开启和关闭时,驱动器54使用气缸或者电缸。
50.进一步地,请参阅图7,在转台51上加装了循环风机55,循环风机55的输入端和输出端均与授粉罩52连接,用于驱动授粉罩52内的气体循环流动,这样可以使花粉在授粉罩52内的分布更加均匀。
51.进一步地,请参阅图8和图9,循环风机55具有两个输出端,第一个输出端与授粉罩
52连接,第二个输出端与花粉提取单元4连接。这样在花粉提取单元4内漂浮的花粉向授粉单元5流动的过程中,循环风机55可以向花粉提取单元4内注入流动的空气,迫使花粉提取单元4内漂浮的花粉流入到引流管道6内,同时也能够在引流管道6内产生负压,加快引流管道6内的花粉流入授粉单元5。
52.在一些可能的实现方式中,循环风机55的第二端与花粉提取单元4具有多个连接处,更近一步地,这些连接处的数量与引流管道(6)的输入端的数量相同且一一对应。
53.应理解,控制器8可以使用可编程逻辑控制器(plc、dcs)或者电脑,第一纵向升降模组2和第二纵向升降模组3中的动力元件是伺服电机,伺服电机通过伺服放大器与控制器8连接。
54.压缩空气单元43、驱动器54和循环风机55等的动力元件是电机,电机通过控制电路与控制器8连接,控制电路由开关和换向器组成,开关负责电路的通断,换向器负责转向的调整。
55.移动车1的行进由运动电机(负责前进和后退)和转向电机负责,运动电机和转向电机同样通过控制电路与控制器8连接。
56.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。