1.本发明涉及挖掘机技术领域,具体为一种新型挖掘机单手柄控制系统及其控制方法。
背景技术:
2.挖掘机 ,又称挖掘机械(excavating machinery),又称挖土机,是用铲斗挖掘高于或低于承机面的物料,并装入运输车辆或卸至堆料场的土方机械,挖掘机挖掘的物料主要是土壤、煤、泥沙以及经过预松后的土壤和岩石,从近几年工程机械的发展来看,挖掘机的发展相对较快,挖掘机已经成为工程建设中最主要的工程机械之一,挖掘机最重要的三个参数:操作重量(质量),发动机功率和铲斗斗容。
3.现有专利(cn203514390u)公开了一种挖掘机单手柄控制系统,利用单手柄的向前和向后运动分别控制动臂油缸伸和缩运动;利用单手柄的向左和向右运动分别控制液压马达向左和向右旋转;单手柄设置手柄套并能轴向滑动和转动,利用手柄套的向上和向下运动分别控制斗杆的伸和收;利用手柄套的左旋和右旋运动分别控制铲斗油缸的的换向阀使铲斗油缸伸和缩运动。该实用新型通过单手即可操作挖掘机全部挖掘动作,复合人体工程学原理,单手操作有利于快速掌握技巧,操作非常简便,复合人体心理和生理规律。其结构简单,成本很低,容易制造或改造,非常利于推广实施。虽然该系统能够进行使用,但是灵敏度较低,很容易发生故障。
技术实现要素:
4.(一)解决的技术问题针对现有技术的不足,本发明提供了一种新型挖掘机单手柄控制系统及其控制方法,解决了灵敏度较低,很容易发生故障的问题。
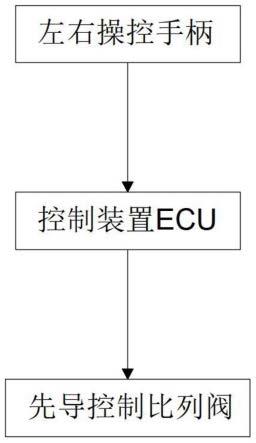
5.(二)技术方案为实现以上目的,本发明通过以下技术方案予以实现:一种新型挖掘机单手柄控制系统,包括左右操控手柄,所述左右操控手柄连接有控制装置ecu,所述控制装置ceu连接有先导控制比列阀。
6.优选的,一种新型挖掘机单手柄控制系统其控制方法,具体包括以下步骤:s1.中位反位操作操纵手柄位置传感器发出的信号随其操纵位置的变化而变化,当手柄位于中位或反位操作时,其输出信号在0.6~2.8v之间,ecu控制相应比例阀电流约90ma左右,该比例阀处于关闭状态,相应的先导控制油压为零;s2.操作操纵位时当操作该操纵位时,其输出信号在3.0~4.4v之间,随操作幅度增大而增大,ecu控制相应比例阀电流随之按比例在300~1000ma间变化,相应的先导控制油压在0.5~2.9mpa间变化,从而控制相应的动作换向阀开度;
s3.手柄x轴y轴操纵手柄x轴或y轴的正、反向2个位置传感器输出信号电压应在0.4~4.6v范围内,并存在u正=5-u反的关系,其关系误差应在0.3v之内,否则认定该轴的传感器有故障,控制器ecu将对该动作机构的2个控制比例阀电流进行安全锁定,使该动作机构无法工作,并进行故障报警;s4.安全保障操作为确保安全,在打开电源和起动前,控制装置ecu需确认各操纵位置位于中位8个位置传感信号电压均应为2.5
±
0.3v,否则以操纵手柄不在中位而对动臂、斗杆、铲斗、回转所有动作的控制比例阀电流进行锁定保护,禁止其工作;s5.功能系统调整系统的调整主要是操纵手柄位置传感器的调整和先导油压力的调整。
7.优选的,所述s5中具体还包括位置传感器为电位式,其电源为5v,其轴可360
°
旋转,每个操纵手柄有4个位置传感器,调整时使手柄立于中位,首先调整手柄圆盘与柱塞间的间距1~2mm,然后分别调整各位的传感器输出信号电压在2.5
±
0.2v范围。
8.优选的,所述方法还包括故障诊断系统具体为故障诊断系统通过显示器进入,分为服务程序和故障诊断程序,通过服务程序可检测系统各传感器的输出电压信号参数和电磁阀控制电流参数;通过故障诊断程序可查询过去的故障或现故障的故障代码。
9.优选的,所述控制装置ecu具体的为控制装置ecu除接收左、右操纵手柄8个操作位置指令信号之外,还从动力控制ecu获取发动机和泵运行状态信息,向显示器传递系统控制和故障信息;利用各控制信息对回转、动臂、斗杆、铲斗4个动作机构的8个动作先导控制比例阀进行控制。
10.优选的,所述先导控制比例阀具体的为电磁控制式,在控制装置ecu电流的控制下,控制各动作的先导浊压,从而控制各换向阀的开度和换向。
11.优选的,所述控操纵手柄具体的为x、y每轴各有2个同轴相连电位式传感器,分别作为每轴正、反向操作的位置信号,每个手柄共有4路模拟信号输出,主要向控制ecu输出操纵手柄4个操作位的位置指令信号。
12.(三)有益效果本发明提供了一种新型挖掘机单手柄控制系统及其控制方法。具备以下有益效果:本发明提供了一种新型挖掘机单手柄控制系统及其控制方法,该方法能够高效的检测出操作过程中所发生的故障并快速确定故障原因,并且在操作过程中其灵敏度较高,不易发生故障,从而使得该控制方法在控制挖掘机时工作效率更高。
附图说明
13.图1为本发明的流程示意图。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.实施例:如图1所示,本发明实施例提供一种新型挖掘机单手柄控制系统,包括左右操控手柄,左右操控手柄连接有控制装置ecu,控制装置ceu连接有先导控制比列阀。
16.一种新型挖掘机单手柄控制系统其控制方法,其特征在于,具体包括以下步骤:s1.中位反位操作操纵手柄位置传感器发出的信号随其操纵位置的变化而变化,当手柄位于中位或反位操作时,其输出信号在0.6~2.8v之间,ecu控制相应比例阀电流约90ma左右,该比例阀处于关闭状态,相应的先导控制油压为零;s2.操作操纵位时当操作该操纵位时,其输出信号在3.0~4.4v之间,随操作幅度增大而增大,ecu控制相应比例阀电流随之按比例在300~1000ma间变化,相应的先导控制油压在0.5~2.9mpa间变化,从而控制相应的动作换向阀开度;s3.手柄x轴y轴操纵手柄x轴或y轴的正、反向2个位置传感器输出信号电压应在0.4~4.6v范围内,并存在u正=5-u反的关系,其关系误差应在0.3v之内,否则认定该轴的传感器有故障,控制器ecu将对该动作机构的2个控制比例阀电流进行安全锁定,使该动作机构无法工作,并进行故障报警;s4.安全保障操作为确保安全,在打开电源和起动前,控制装置ecu需确认各操纵位置位于中位8个位置传感信号电压均应为2.5
±
0.3v,否则以操纵手柄不在中位而对动臂、斗杆、铲斗、回转所有动作的控制比例阀电流进行锁定保护,禁止其工作,常见故障有铲斗、斗杆、动臂、回转均不能动作,并有故障报警,个别动作不能动作,并有故障报警,铲斗、斗杆、动臂、回转等动作比较慢,个别动作比较慢;s5.功能系统调整系统的调整主要是操纵手柄位置传感器的调整和先导油压力的调整。
17.s5中具体还包括位置传感器为电位式,其电源为5v,其轴可360
°
旋转,每个操纵手柄有4个位置传感器,调整时使手柄立于中位,首先调整手柄圆盘与柱塞间的间距1~2mm,然后分别调整各位的传感器输出信号电压在2.5
±
0.2v范围,分别操作每位到最大,检测其传感器输出信号电压应大于4.2v,否则应再次检查手柄圆盘与柱塞间的间距和手柄万向节的磨损度并进行修复。
18.方法还包括故障诊断系统具体为故障诊断系统通过显示器进入,分为服务程序和故障诊断程序,通过服务程序可检测系统各传感器的输出电压信号参数和电磁阀控制电流参数;通过故障诊断程序可查询过去的故障或现故障的故障代码。
19.控制装置ecu具体的为控制装置ecu除接收左、右操纵手柄8个操作位置指令信号之外,还从动力控制ecu获取发动机和泵运行状态信息,向显示器传递系统控制和故障信息;利用各控制信息对回转、动臂、斗杆、铲斗4个动作机构的8个动作先导控制比例阀进行控制。
20.先导控制比例阀具体的为电磁控制式,在控制装置ecu电流的控制下,控制各动作的先导浊压,从而控制各换向阀的开度和换向。
21.控操纵手柄具体的为x、y每轴各有2个同轴相连电位式传感器,分别作为每轴正、反向操作的位置信号,每个手柄共有4路模拟信号输出,主要向控制ecu输出操纵手柄4个操作位的位置指令信号,操纵手柄位于中位时每个传感器电压为2.5
±
0.2v,操作时,被操作位的传感器输出在2.5~4.6v间,而相反位传感器输出在2.5~0.6v间,它们的输出信号随操作位置的变化而变化。
22.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。