1.本发明涉及气井或井中流体的体积控制,特别是检测井涌和泥浆进入地层的损失。模拟表明,本发明的系统将能够检测到小的裂缝和损失。
2.本发明在陆地和海上均可用于钻探油或气井。它还可用于井中的干预、作业、固井、注入或井内其他类型的操作,其中,需要保持对井内流体体积的控制。
3.通过本发明的系统,可以检测到气体、液体或两者的混合物的流入,以及例如由于渗漏到地层而造成的液体损失。
背景技术:
4.在传统的钻井系统中,立管在任何时候都要保持基本满载。泥浆顺着钻杆向下泵送,并在钻杆与井筒、套管或立管之间的环空向上流动。在立管的顶部是一个出口,称为钟形接头,通常位于分流器外壳内。当泥浆到达钟形接头时,它流经与钟形接头相连的称为流管的出口管,流管将泥浆送回到碎屑碎屑振动器,然后再回到泥坑。
5.在浮式海上钻井船上,立管具有伸缩接头(也叫滑动接头),用于在船舶和连接到海床的钻井隔水管之间运动。滑动接头的运动导致长度发生变化,从而导致立管的体积也发生了变化。因此,当滑动接头被压缩时,更多的泥浆将流向立管顶部并通过钟形接头流出,而当滑动接头伸长时,通过钟形接头流出的泥浆将减少,在某些情况下甚至停止。由于在恶劣天气下滑动接头运动引起的每单位时间的立管容积变化可能高于钻井过程中通过钻杆泵送引起的正常流速,在此过程中立管中的泥浆液位也可能下降到钟形接头出口以下。
6.通过钟形接头和出口管的这种波动的泥浆流使得从立管流出的泥浆流量难以测量。由于流量变化很大,出口管道的直径必须足够大,以适应最高预期的流量。这意味着,当流量较小时,出口管可能不会在整个横截面上充满泥浆。上述情况的结果是,很难准确地确定立管中的泥浆体积,从而确定井系统中的泥浆总体积。此外,由于滑动接头随着钻机的运动不断伸长和缩回,即使滑动接头下面的立管上的流量是恒定的,在流线上测得的井的流出流量也会不断变化。在恶劣的天气条件下,通常可以经历10秒的波浪周期,这可能会使立管的瞬时体积变化达到每分钟10000-15000升。此外,由于实际操作中钻机将沿所有三个轴移动,可能会出现与站位保持有关的滑动接头移动。典型的钻井速度,包括深水钻机的增速将是每分钟6000-8000升。由于钻机的运动一直在变化,因此运动带来的流量变化实际上不是完美的正弦波形式,而是表现出不稳定的状态。
7.诸如科里奥利流量计之类的流量测量装置具有不准确性。这些流量测量的不准确可能很难与流出量变化的不稳定行为区分开来。业界已经做出了许多努力,用算法和改进的测量方法来解释这种影响,但对于目前所有的方法来说,这些影响都有残余的测量不确定性。
8.wo2014/055090显示了一种带有出口的滑动接头。该出口与泥浆回流系统(由节流阀、脱气机和储液器代表)相连接。出口布置在泥浆回流系统下面。该系统只有在所谓的控
制压力钻井下才能发挥作用,即当滑动接头上方的密封件关闭且立管处于压力下时。当密封件打开,或者没有密封件时,系统将无法将泥浆从滑动接头送回到泥浆回流系统。
9.us3976148显示了一个在立管顶部有直径增大部件的系统,该系统取决于流出出口的重力流动。要发生这种流动,立管中的泥浆液位必须超过出口和油箱(加工区)之间的管线最高点的液位。因此,随着伸缩接头的伸缩,流动将间歇性的从最大值向下到零。液位也只能沿着管线最高点和立管顶部之间的小高度变化。
10.直径增大部件形成在立管的最上端,并形成滑动接头的内套管的一部分。立管的泥浆出口在直径增大部件下方一段距离处。
11.ep3128120和au2014227488也展示了现有技术解决方案的例子。在建造浮动式钻井平台时,人们通常会试图限制从月池到钻台的总高度,以降低钻井平台的建造成本。伸缩接头的部署通常是为了使其在至少部分行程中处于飞溅区(设备进入水中的地方,即吃水线)。在典型的海上浮动钻井平台上,通常有一个位于分流器下方的弹性接头。分流器也是钟形接头通向流线的地方。在弹性接头和滑动接头之间通常只有一个7-15英尺(2-5米)的短的短节。这意味着在现有的钻机上,弹性接头和伸缩接头之间可用的空间有限。
技术实现要素:
12.本发明的主要目的是提高确定井系统中流体总体积的准确性。这对于具有滑动接头的立管特别有用,但是本发明也可用于没有滑动接头的立管,其中从立管的流出流量由于其他因素而变化,例如钻杆的脱扣。
13.本发明的另一个目的是能够在封闭系统和开放系统中使用该装置,无论回流泥浆的泥浆处理设备的入口位于何处,即使该入口接近立管的顶部。
14.这些目标通过所附独立权利要求中定义的特征实现。从属权利要求书定义了本发明的优选或方便的实施方案。
15.根据本发明,立管上端下方,即钟形接头以下,但在任何滑动接头以上和任何海平面以上,或陆地井的地面以上,具有直径增大部件。在下面的描述中,这部分也被称为流量阀。调节立管中的液体(如泥浆)的上层,使上层基本位于直径增大部件内。
16.直径增大部件优选地短于3.3米(10英尺),其直径与没有增大直径的同样长的立管部分的体积相比,优选地增加800至1100升的体积。该体积与300米钻杆的体积或恶劣天气下立管压缩的典型体积具有相同的量级。
17.根据本发明,它包括连续测量滑动接头位置的装置。这种测量用来计算由于滑动接头的延伸和收缩而导致的立管容积的变化。这种体积变化进一步转化为立管内液面的相应变化。然后将计算出的液面变化与实际液面进行比较,以确定井系统上的液体体积是否发生了变化,如由于流入或流失到地层,或者类似情况。进一步地,根据本发明,直径增大部件与出口相连,该出口能够将流体从立管引向船上的泥浆回流系统,如泥浆坑。优选的是,出口与泵相连,该泵将流体(如泥浆)从直径增大部件抽到泥浆回流系统。泵的使用允许流量阀的出口以及流量阀内的工作液位位于碎屑振动器的液位以下。
18.在本发明的一个实施例中,提供了测量来自泵的流量的传感器,以及测量进入井系统的任何流体流量的传感器井,例如通过钻杆泵送泥浆。这些流量纳入计算,以确定直径增大部件的预期液位。
19.本发明还提供了一种立管的操作方法,该方法允许流量阀的流出流量与上升立管的流量非常接近,并让由滑动接头运动引起的井外变化的流量在流量阀内被吸收。这是通过不断测量滑动接头的位置并使用该测量值来计算相对于参考点的体积变化来实现的,这里称为“滑动接头校正体积”。
20.在流量阀内设置所需的液位,这里称为“流量阀设定点”。由于流量阀的几何形状是已知的,“滑动接头校正体积”可以转换为“流量阀设定点校正体积”,并加入到流量阀设定点。这个“校正的流量阀设定点”可以作为泵控制器的参考点,该控制器设定为将流量阀液位保持在“校正的流量阀设定点”。当滑动接头运动时,这个“校正的流量阀设定点”将在流量阀内不断变化。
21.为了增加流量阀的有效操作容积,钻工还可以利用流量阀上方直到钟形接头的立管容积,作为本文所述系统的活动部分。由于内部的几何形状是已知的,体积和液面之间的关系可以很容易地计算出来并记录下来。在本发明方法的第二个实施例中,流量阀中测得的液位与滑动接头位置的变化和由流量计测量的流量阀的流出流量进行比较。在本发明方法的第二实施例中,将流量阀中的测量液位与滑动接头位置的变化和由流量计测量的流出阀的流量进行比较。根据这些读数,计算出井的实际流出流量。然后将该值与井内的流入流量进行比较,通常由钻杆和增压管线的流量以及与油管进出井有关的任何体积变化给出。
22.在操作过程中,从井出来的泥浆重量可能会因为多种原因而改变。在本发明方法的第三个实施例中,该装置用来测量离开井的泥浆的重量。这是通过提高液位到分流器外壳并让水流出钟形接头来实现的。利用流量阀中的压力传感器和从压力传感器到钟形接头的已知高度,可以计算出泥浆重量。如果正在测量绝对压力,则可以测量大气压力以校正读数。
23.在本发明方法的第四个实施例中,从泵上的压力传感器到流线的已知高度用来计算泥浆重量。泵出口和流线上压力传感器的高度是恒定的。在泵出口测量的压力将由以下公式给出:摩擦损失 泥浆重量x高度x重力常数 大气压力。可以测量大气压力。可以计算摩擦损失。在低流量或零流量的条件下,摩擦损失将很低或不存在。
24.在本发明方法的第五个实施例中,包含流量阀的装置与表面背压(sbp)系统结合运行。在这个实施例中,该系统用来测量整个立管密封装置的泄漏率。在操作表面背压系统时,来自井的回流要通过表面背压系统的单独回流管道转回钻机。因此,井流不会像传统的钻井作业那样通过流量阀。然而,需要监测sbp密封装置的泄漏率。sbp密封装置的泄漏率将视为流量阀的体积增加。通过使用“滑动接头校正体积”来校正滑动接头的运动,可以使用流量阀的读数计算密封装置的泄漏率。由于与传统钻井速度相比泄漏率较小,因此在确定密封元件上的泄漏率时,优选的操作方法是在流量阀的隔离阀关闭的情况下进行操作,让液位上升到阈值,然后打开流量阀的隔离阀,通过操作泵降低液位,然后再次关闭隔离阀,让液位再次升高。还可以预见其他操作模式,例如以小流量操作泵。
附图说明
25.现在将参考附图中所示的优选示范性实施例,进一步详细描述本发明,其中,
26.图1显示了本发明的示意性轮廓;
27.图2和3显示了流量阀;
28.图4显示了导流板的细节;
29.图5显示了在流量阀出口处的过滤器;
30.图6显示了通过流量阀的横截面;
31.图7显示了用于连接泥浆回流管道的连接系统;
32.图8显示了流量阀下部的细节;
33.图9显示了在流量阀和滑动接头之间耦合的传感器导线;
34.图10显示了本发明的系统,在流量阀和泥浆流线之间连接了泵橇;
35.图10显示了泵橇和流量阀在钻机上的放置;
36.图11-18显示了本发明的装置的安装顺序。
具体实施方式
37.应该理解,以下详细描述作为本发明的一个实施例的说明,不应该被解释为限制本发明的范围。
38.描述中使用的缩略语:
39.bop
ꢀꢀ
防喷器
40.edr
ꢀꢀ
强化钻井
41.ekd
ꢀꢀ
强化井涌检测
42.gpm
ꢀꢀ
每分钟加仑
43.mtbf 平均故障间隔时间
44.pfd
ꢀꢀ
工艺流程图
45.sg
ꢀꢀꢀ
比重
46.vfd
ꢀꢀ
变频驱动器
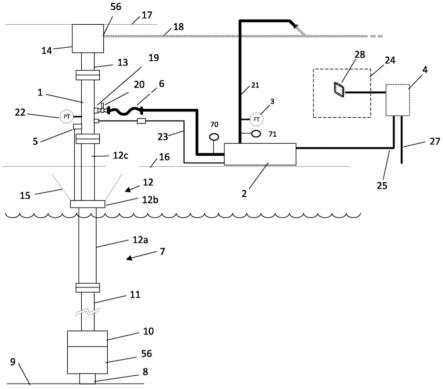
47.图1显示了本发明在钻井系统中的示意性轮廓。这里显示了钻井立管7,它从浮式钻井设施,如钻井平台(未显示)延伸到海床9。立管7包括常规单元,例如固定到延伸到海床9中钻孔(未示出)的井口(wh)8、连接到井口8的防喷器(bop)56、下层海洋立管套件(lmrp)10、立管段11、伸缩接头(tj)12、弹性接头(fj)13和分流器组件14。伸缩接头12包括外筒12a、拉力环12b和内筒12c。拉力环通过拉力线15连接到平台。
48.立管7延伸穿过平台的主甲板16,并到到钻台17。
49.从分流器组件14,有出口56通过钟形接头,到达泥浆回流管道18,该管道延伸到泥浆回流处理系统(未显示)。泥浆回流处理系统包括振动器、脱气机和其他类型的常规设备,将泥浆处理到可再利用的状态。
50.在使用中,泥浆通过钻杆(未显示)泵送,钻杆从钻台17上方延伸,穿过立管7,进入钻孔。泥浆从钻杆下端的钻头处流出钻杆。泥浆从钻孔中流回,在钻杆和立管7之间的环空中通过立管7向上流向分流器14。泥浆从分流器中流出,通过钟形接头56,并通过泥浆回流管道18,流向泥浆回流处理系统。在泥浆回流处理系统中处理后,泥浆再次通过钻杆向下泵送(未显示)。
51.到目前为止,对钻井系统和上述操作的描述是描述了常规系统。系统的概要、部分和操作可能会有所不同,但通常如上所述。
52.根据本发明,流量阀1已插入立管,在这种情况下,在伸缩接头12和弹性接头13之
间。然而,流量阀1可以在立管7的另一个地方插入立管7,只要它在立管的任何滑动接头之上。
53.流量阀形成立管7的一部分,该部分具有相对于立管7的主要部分(例如立管接头11)增加的直径。
54.流量阀1具有出口19,该出口装有立管隔离阀20,优选是远程操作的。
55.出口与泥浆回流管道6相连,该泥浆回流管道又与泥浆回流泵2的入口相连。泥浆回流泵2的出口又与连接管线21相连,该连接管线与泥浆回流管道18相连。
56.泥浆回流泵2具有入口压力传感器70和出口压力传感器71。
57.流量阀1上装有压力传感器22,连接管线21上装有流量计3。流量计3也可以放置在从流量阀1到泥浆回流管道18的其他地方。
58.伸缩接头测量装置5设置用来测量伸缩接头12的内筒和外筒之间的相对运动。
59.处理器4通过钻机信号输入口27与钻井控制系统相连,通过接口25与泥浆回流泵2相连。它还通过仪表电缆23与压力传感器22相连。处理器4也收集来自伸缩接头测量装置5和流量计3的数据。处理器4能够运行井涌检测软件,如强化井涌检测(ekd)系统。
60.处理器4连接到位于钻机舱24中的控制面板28。
61.流量阀1形成立管系统7和ekd系统之间的接口。如上所述,它包含压力传感器,如读取立管7内部压力的传感器22、立管隔离阀20和用于有效连接泥浆回流管道6的管道与电缆的连接系统,如在流量阀1和甲板16上的设备之间的仪表电缆23。
62.流量阀1最好位于上弹性接头13和伸缩接头12之间。为了尽量减少对钻机原始立管配置的影响,流量阀1的接头应尽可能短,优选情况下为10英尺(约3米)或更短。为了能够同时适用于75英寸(190.5厘米)和60.5英寸(153.67厘米)的旋转钻机,流量阀1的最大外径优选为56英寸(142.24厘米)。
63.使用ekd系统时,立管中的液位将降至流量阀1内。伸缩接头随着钻井平台的移动(升沉和平移运动)而进出,因此,立管的体积也随之改变。立管中体积的这种变化意味着流量阀中液位的变化。ekd系统在正常运行模式下,不通过改变立管的泵速来补偿这种液位变化,而是连续监测伸缩接头的行程,以便能够区分来自井的体积变化和伸缩接头运动引起的体积变化。如上所述,伸缩接头的位置由测量装置5监测,下面将更详细说明。流量阀1应该有足够的体积容量,包括由于高达 /-2.5m的钻井平台升沉以及操作余量而导致的体积变化。
64.在大多数情况下,保持流量阀尽可能短是重要的。为了在增加系统在升沉方面的操作窗口时,不必增加流量阀的高度来增加体积,系统可以具有主动控制泵速的算法,以便在滑动接头收缩时,泵速较快,在滑动接头伸展时,泵速较慢。
65.流量阀的设计是这样的:它是自排水的,没有颗粒堆积的死角。这一点将在下文中详细解释。
66.本发明在一个优选的实施例中可以作为强化井涌检测(ekd)系统,但本发明也可以作为增强型损失探测系统,或用于任何有利于准确了解井内流体体积变化的其他操作。下面将结合这种井涌检测系统来描述本发明。该系统的主要功能是提供比传统系统更精确的流体和体积测量,可用于任何可能产生效益的操作。井涌检测系统能够在钻井作业中快速检测井涌。它包括连接到浮式钻井装置的立管上端的泵系统。该泵将立管中的液面降低
到钟形接头下方,并将立管中的液体回流到单独的导管中,绕过钟形接头。如上所述,一组压力传感器22安装在流量阀1上,并且流量计3安装在泥浆回流管道21中,为ekd控制系统提供重要数据。正如所解释的,系统还利用测量传感器5来测量滑动接头拉力环12b相对于流量阀1的位置。然后用这个位置来计算与滑动接头运动有关的立管容积变化。此外,一组钻机数据,例如钻机泵的泵速、立管尺寸等,被输入到ekd控制系统4中。根据这些数据,ekd控制系统向钻工提供有关操作中的液体增加或损失的信息。
67.图2和图3说明了流量阀1的实施例。流量阀1包括下法兰盘30和上法兰盘31,分别用于将流量阀1连接到滑动接头12和弹性接头13。
68.它还包括外筒132,该外筒配备有下端盖32和上端盖33。盖32、33径向向内延伸,分别连接下部管段35和上部管段36。管段35、36的直径与立管直径相对应。
69.穿孔管段37连接下部和上部管段35、36。穿孔管段可能有如图3所示的切口、从顶部到底部的纵向切口、或允许从穿孔管内部到外部流动的任何其他模式。
70.下端盖32方便地呈锥形,其最低点靠近下部管段35。
71.导流板38布置在下端盖的内侧,既是为了强度,也是为了避免颗粒的沉降。这些导流板38在图4中显示得更详细。穿孔管段37的浮体9布置在下端盖32的下边缘,以使颗粒和碎屑落入立管1。
72.上端盖33具有加强筋40。
73.来自流量阀1的流体出口19是导管41的形式。如图5所示,过滤器42安装在形成流量阀出口的孔43中,以防止大颗粒进入泵系统2。在该图中,导管41的一部分已经被移除,以显示过滤器。
74.图6显示了通过流量阀1的横截面。如图所示,作为立管7的延续部分的管段37被穿孔,以使流体尽可能自由地流向由加大直径筒132围成的周围空腔。代替穿孔壁,立管7也可以通过空腔中断。然而,穿孔的立管壁将为立管7提供更多的强度。穿孔立管壁可以承担起立管7的张力。如图6所示,壁面穿孔可以是离散的切口,或者管段37可以替代地在盖33、32之间具有从顶部到底部纵向延伸的切口,以确保整个流量阀有恒定的液位,以提高操作的准确性。
75.如图7所示,用于安全和有效地连接泥浆回流管道的连接系统位于流量阀上。接头的销端44安装在泥浆软管6上。它悬挂在绳索链条、检修线或类似物中,通过支架45承受重量,并水平插入箱体末端46,用锁紧螺母47固定。
76.ekd控制系统的一个重要输入是钻机上伸缩接头的行程。初步研究表明,一些钻井平台配备了一个测量系统,作为立管管理系统的一部分。在其他钻机上,没有系统对此进行测量。由于ekd系统需要此信号,因此用户有两种选择:
77.将可用的钻机信号用于ekd控制系统。
78.在不可用时,在钻机上安装新的传感器。
79.优选的传感器是电线长度测量装置,在优选的解决方案中使用如图8所示的紧固支架48,其安装在流量阀和伸缩接头的外筒之间,如图9所示。这是立管监控系统和电缆/测井公司都使用的经过验证且准确的方法。
80.传感器5包括可旋转地安装在支架48上的卷轴49。卷轴49包含细而耐用的缆、线或绳50,在其自由端连接到拉力环12b。当滑动接头相对于流量阀1移动时,绳将从卷轴49上卷
进和卷出。传感器检测卷轴的旋转,因此可以计算出卷轴和拉力环12b之间延伸的绳长度。
81.作为替代方案,滑动接头内的激光或压力传感器可用于测量滑动接头的运动。
82.由于该传感器输入的关键性,将使用双传感器进行冗余,如图8和9所示。
83.图8还显示了安装在流量阀底部的压力传感器51。在优选的实施方案中,使用了四个传感器。
84.流量阀使用弹性泥浆回流管道6a与地面管道连接。管道6a优选与钻机的泥浆增压管道(未显示)具有相同的规格。
85.此外,用于供电和控制的电缆23连接在流量阀传感器和ekd控制系统之间。这条电缆可以和泥浆回流管道6a捆绑在一起。在流量阀1经过旋转后,管道6a与流量阀1连接。由于阀门20在安装过程中隔离了流量阀1,所以管道6a的连接不会在钻井时间运行。术语钻机时间表示延迟钻井操作所花费的时间。管道6a将连接到鹅颈管道系统,以便安全有效地连接管道。
86.如图10所示,顶层泵橇2用于将流体从立管7泵送到流线18,通过泥浆管道6和连接管线21。为了便于安装,泵橇2在实际操作中尽可能的小。布置在泵橇2中的泵是根据类似应用的经验来选择的,在钻井作业中泵送泥浆和碎屑。传动系统和电机的尺寸根据项目在流量和泥浆重量方面定义的操作范围确定。该泵优选是离心泵,但也可以是容积泵,如活塞泵。
87.泵的电机由放置在钻机内部电气室的ekd控制系统柜中的vfd控制。
88.在泵撬上放置接线盒,用于连接泵撬上的所有传感器和电缆。接线盒包括安装在面板上的紧急停止装置。
89.在泵橇2的出口侧布置了流量计3,例如科里奥利流量计,用于测量从泵出来的泥浆流量。流量计布置在泵的下游,测量系统中的回流量。流量计也可以布置在泵的上游。
90.ekd控制系统将通知钻工有关操作中的任何流量异常,并对这些事件给出一个容易解释的图形表示。
91.除了传统的钻机读数外,ekd控制系统的重要输入参数,还有:
[0092]-用于体积测量的流量阀1中的压力读数;
[0093]-泥浆流出泵2的流量计读数;
[0094]-位置传感器5确定外筒12a相对于内筒12c的位置;
[0095]-对于某些操作模式,还使用了泵出口压力传感器71。
[0096]
此外,控制系统从钻机的钻井控制系统获得输入,如:吊钩高度、流进量、坑体积等。
[0097]
根据传感器输入和应用的控制系统算法,当检测到流量或体积异常时,ekd控制系统会自动向钻工发出警报。
[0098]
泵橇2的放置很方便,使得泵的吸气和排气侧的管道长度最小化。同时,泵需要足够的吸引高度。因此,理想的位置是尽可能靠近井中心,在下层甲板16上,尽可能地靠近流线18。在典型的钻井船上,在月池右舷靠近井中心的地方有空间放置2号泵撬。来自分流器的流线18在这个位置上方笔直通过,所以管道的延伸最小化。这在图11展示。
[0099]
ekd系统的理念是,应该对船上现有的钻井控制系统进行少量或不进行修改。ekd系统需要钻机系统的一些“只读”标签,可以直接通过钻井控制系统的接口或通过泥浆记录
器的接口。此外,钻工应能通过分流器控制系统隔离立管隔离阀20(故障-安全-关闭)。
[0100]
参考图11-18所示为系统的高级部署顺序。重点是安全和有效的操作。
[0101]
步骤1如图11所示。
[0102]
立管7和bop10(图11中未显示)按常规部署。伸缩接头12与在星形架52中的立管7相连。
[0103]
步骤2如图12所示。
[0104]
伸缩接头12处于星形架52中。
[0105]
步骤3如图13所示。
[0106]
安装ekd流量阀1,并通过法兰连接到伸缩接头12。
[0107]
步骤4在图14和15中显示。
[0108]
打开星形架52,并将立管7提升约3米,进入伸缩接头12的外筒12a。长度测量传感器的测量线连接在流量阀1和伸缩接头12之间。流量阀1降低并处于星形轮52中。
[0109]
图15显示了带有测量卷轴49和绳索50的流量阀1的下端细节。
[0110]
图16中显示了步骤5。弹性接头13被连接到流量阀1,此后立管的运行按常规继续。
[0111]
步骤6在图17中示出。流量阀1和泵橇2之间的泥浆回流管道6a被安装。这是通过使用牵引起重机(未显示)来完成的,该起重机有一根连接到管道6a外端的金属线53,以支持管道的重量。然后,管道6a的连接销端44与流量阀1上的箱体末端46对齐,然后两者对接并固定。然后连接阀门和传感器的控制线(此处未显示)。
[0112]
步骤7如图18所示,在完成所有连接后,对系统进行测试,并为运行做好准备。
[0113]
ekd系统的工作原理如下。
[0114]
通过使用回流泵2,立管7中的液面调整到在流量阀1内的液位,即在直径增大部件中。流量阀1中的液位传感器,如压力传感器22,可以检测液位。
[0115]
泥浆顺着钻杆被泵入井内。当泥浆通过钻杆和立管7之间的环空向上流动时,泥浆通过回流泵2从流量阀上抽出。
[0116]
在第一种控制模式下,流出流量阀1的泵速被调整为与进入井中的泵速相对应。如果滑动接头12是静止的,即没有升沉运动或钻井船的任何漂移,那么泥浆液位在流动阀1中就会基本恒定。
[0117]
然而,随着滑动接头的延伸和收缩,泥浆在滑动接头12上方的立管7内上下移动。这导致泥浆的液位变化。流量阀1有足够大的直径,使流量阀1内的液位变化受到限制。优选的是,液位保持在流量阀1内。
[0118]
随着滑动接头12的伸缩,滑动接头1的运动由上述运动传感器5测量。由于滑动接头12的内径是已知的,因此可以计算出由此产生的泥浆体积位移。这几乎是实时完成的。然后,这个体积位移被用来确定流量阀1内的预期液位变化,以及泵入井内和流出流量阀1的泥浆体积的任何差异。然后将预期的泥浆液位与由流量阀1中的液位或压力传感器测量的实际泥浆液位进行比较。
[0119]
在系统的一种操作模式中,允许流量阀中的液位变化,以消减任何流入或损失。在这种模式下,如果实际的泥浆液位与预期的泥浆液位不同,这可能是因为泥浆从地层涌入井或流失到地层。然后将通知或报警给钻工,然后他们可以启动适当的措施来应对这种情况。
[0120]
流量阀1内的体积可能不足以容纳滑动接头12最大行程时的泥浆位移。流量阀1的设计通常是为了适应滑动接头12的正常操作窗口内的位移。尽管如此,如果泥浆液位移动到流量阀1以下或以上,仍然可以检测到泥浆的流入或流失。这是由于在每个起伏期,当液位超过流量阀1的体积时,可以检测到由滑动接头12排出的泥浆体积的增加或减少。这是由于精确测量滑动接头12的运动,以及滑动接头12和流量阀1之间的短距离。因此,由于滑动接头12的运动,泥浆的位移实际上会立即在流量阀1中被检测出来。
[0121]
在操作过程中,钻杆或套管柱等钻井设备被下入井内。该设备每单位长度具有一定的排带体积,该排带体积因组件而异,但可以测量并且将是已知的。通常的做法是,对进入井中的所有设备配备钻工统计。钻工统计表、每件设备的位置和设备进入井内的速度可以用来校正这种排带体积的的流量和体积测量量。
[0122]
在上述第一种控制模式中,系统是基于流量测量进行控制的。在第二种控制模式下,系统是根据立管7中的液位进行控制。在这种控制模式下,系统将尝试保持虚拟设定点的恒定,虚拟设定点针对滑动接头12的位置进行校正。其方法如下:
[0123]
流量阀内的泥浆液位设定为设定点。通常情况下,这将是在流量阀1的中间位置。
[0124]
设置滑动接头参考点。
[0125]
创建虚拟液位设定点。这个虚拟液位设定点是上面给出的液位设定点,根据从参考点开始的滑移接头运动所带来的液面变化进行校正。这意味着,对于收缩的滑动接头,虚拟液位设定点将高于液位设定点,而对于提取的滑动接头,虚拟液位设定点将低于液位设定点。
[0126]
泵控制器,通常使用pid或pi控制器,将操作以保持立管液位尽可能接近虚拟设定点。这意味着,对于有滑移接头运动的操作,正常的操作模式将是让立管液位不断增加和减少。
[0127]
泵控制器将无法始终保持液位与虚拟液位设定点完全相等。与这种偏差有关的数量需要计算和说明。这是通过比较虚拟液位设定点和实际液位始终都能做到的。由于流量阀的几何形状是已知的,这些读数可以转换为一个体积。通过计算每个时间单位的体积变化,可以计算出一个等效的流量阀的流速。
[0128]
还测量和计算了与进出井的设备的排带体积相关的体积变化或单位时间的体积变化。
[0129]
然后比较流量读数,流入流量、流出流量和流量阀的流量以及排带体积,以确定井内是否有增益或损失。
[0130]
由于存在与测量精度、传感器漂移等相关的不确定性,通常将如卡尔曼过滤器的数据过滤器应用于读数,以确定井中是否存在增益或损失。
[0131]
钻工将使用阈值,以便在有增益或有损失时得到提醒。
[0132]
在某些情况下,在的地层中钻井时,泥浆不断流失到地层中。在这种情况下,钻工可能会决定,在不断损失的情况下继续作业是安全的。然后,他可以设定可接受的最大损失,如果损失超过这个阈值,就会发出警报。
[0133]
在其他情况下,泥浆和地层之间可能存在较大的温差,导致泥浆持续加热。由于泥浆在受热时通常会膨胀,这种加热将被视为体积的增加。在某些情况下,钻工可能会决定,既然体积增加的原因是已知的,因此可以继续安全钻探。
[0134]
除了上面的例子,还有许多其他情况,在这些情况下,钻工可以决定在测量到的收益或损失的情况下继续作业。上述观点是为了说明,可以用已知的恒定增益或损失来进行操作。在这种情况下,流体测量值将根据这种已知的增益或损失进行校正,并相应地设定阈值。
[0135]
如果井内的温度曲线是已知的,可以测量泥浆的温度,利用泥浆的已知特性,可以计算出泥浆的温升。这种温度上升又可以用来计算泥浆密度效应和由温度引起的相关体积变化。
[0136]
该系统还可用于执行增强的静态流量检查,或在将管道放进或拿出井时监测井。对于流量检查,立管隔离阀20被关闭。测量流量阀1中的液位,并对滑动接头的运动进行校正。由于流量阀和流量阀上方直至钟形接头56的管道的几何形状是已知的,所以液位测量可以转换为体积。对于静态流量检查,钻杆通常会拉离底部,这意味着钻杆会随着钻机的起伏而上下移动。如果有这些测量数据的话,可以根据这个管道排带体积对流量阀泥浆液位进行校正。
[0137]
在起下钻时,泥浆液面将尽可能接近流量阀1的顶部,因为当前的升沉条件将允许,而不会通过钟形接头56溢出。然后,立管隔离阀20被关闭。测量立管液位,并对滑动接头运动和管道位移进行校正。随着钻杆被拉出孔外,流量阀1中的液位会下降。当液面下降到由当前的钻机运动条件决定的某液位时,将通过向井内泵送泥浆来提高液面,通常是通过增压管线(未显示)。这种上升的立管液位,可能涉及也可能不涉及打开立管隔离阀20和操作泵2。
[0138]
为了将钻杆下入井中,在当前钻机运动条件下,将泥浆液面降至操作上可行的最低液位,关闭立管隔离阀20,并按上述方法进行体积测量。一旦液面达到由当前钻机运动条件设定的上限,立管隔离阀20将打开,并使用泵2将流量阀1排到下限位置。
[0139]
为了使用该系统测量用于表面背压(sbp)操作的环形密封元件的泄漏率(这在共同申请的pct/n02020/050266中有详细解释,该申请通过引用纳入本文),使用类似于将钻杆下入井中的方法。液位被带到由钻机运动条件给出的低限,立管隔离阀20关闭。针对滑动接头运动测量和校正流量阀液位。然后利用已知的流量阀的几何形状,将虚拟液面转换为体积。由于井液是通过sbp系统从sbp环形密封元件下方输送回钻机的,所以钻杆位移校正将是从立管中的sbp密封元件一直到流量阀1的长度变化。这个长度变化将等于正在测量的滑动接头12的行程长度变化。本领域的技术人员将知道如何进行这种校正。钻工现在可以监测sbp密封元件的泄漏率。一旦流量阀液面达到上限,立管隔离阀20就会打开,泵2就会运行,使流量阀液面下降到低水平。然后,立管隔离阀20再次关闭,重复这一过程。当排空流量阀1时,可以使用流量计3测量流出的流量,并且这些测量值可以用于sbp环形密封元件泄漏率计算,但是通常立管隔离阀20打开的时间与其关闭期间相比将是非常短的,以至于此期间的泄漏可以忽略不计。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。