1.本发明涉及导航技术领域,尤其是涉及一种多地图的导航方法、系统及存储介质。
背景技术:
2.车载导航仪是一种行车辅助设备,其内置电子地图,并与gps天线共同构成汽车导航系统。汽车导航系统用于为用户提供定位功能,其工作原理为,gps天线接收gps卫星中至少3颗传递的数据信息,结合车载导航仪内的电子地图,通过gps卫星信号确定的位置坐标与电子地图匹配,即可确定汽车在电子地图中的准确位置。
3.针对上述中的相关技术,发明人认为目前在驾驶者驾驶车辆时,车载导航仪内置的电子地图规划的路线的预计时间往往不准确,导致驾驶者在行程仓促的情况下,需尽快到达终点时,若按照电子地图规划的路线行驶,容易导致驾驶者超时到达,影响驾驶者体验感。
技术实现要素:
4.为了便于提高驾驶者体验感,本发明提供一种多地图的导航方法、系统及存储介质。
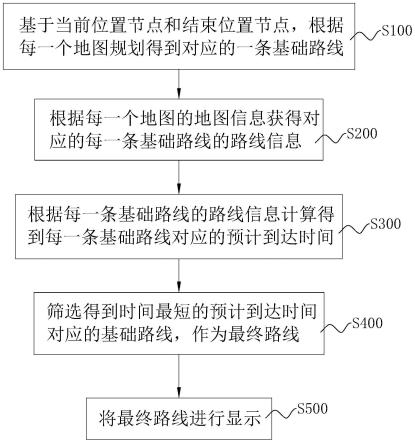
5.第一方面,本技术提供的一种多地图的导航方法采用如下的技术方案:一种多地图的导航方法,包括:基于当前位置节点和结束位置节点,根据每一个地图规划得到对应的一条基础路线;根据每一个地图的地图信息获得对应的每一条基础路线的路线信息;根据每一条基础路线的路线信息计算得到每一条基础路线对应的预计到达时间;筛选得到时间最短的所述预计到达时间对应的基础路线,作为最终路线;将所述最终路线进行显示。
6.通过采用上述技术方案,根据每一个地图的地图信息,获得对应的每一条基础路线的路线信息,用于通过若干路线信息,计算得到若干预计到达时间,筛选时间最短的预计到达时间对应的基础路线,有利于通过多地图为驾驶员筛选出时间最短的最终路线,便于增加用户体验感;由于多地图的功能通常不同,多地图的实时更新速度亦可能不同,故通过多地图筛选有利于增加筛选的准确性,进而提升用户使用感。
7.可选的,所述路线信息包括路线距离值,根据每一条基础路线的路线信息计算得到每一条基础路线对应的预计到达时间,包括:根据每一条基础路线的路线信息得到每一条基础路线的路线距离值;获取预设平均行驶速度值,根据所述预设平均速度值及每一条基础路线的路线距离值,计算得到每一条基础路线对应的预计到达时间。
8.通过采用上述技术方案,基于平均行驶速度值和路线距离值计算预计到达时间。
9.可选的,所述路线信息还包括道路状态,所述获取预设平均行驶速度值,根据所述预设平均速度值及每一条基础路线的路线距离值,计算得到每一条基础路线对应的预计到达时间,包括:获取预设平均行驶速度值;根据每一条基础路线的路线信息得到道路状态;根据所述预设平均速度值及每一条基础路线的路线距离值,计算得到初始到达时间;根据所述道路状态对所述初始到达时间进行修正,得到预计到达时间。
10.通过采用上述技术方案,由于道路状态可能会影响预计到达时间,故基于道路状态对初始到达时间进行修正,以得到预计到达时间,有利于使预计到达时间更精确。
11.可选的,所述道路状态包括道路维护状态和道路通行状态,所述根据所述道路状态对所述初始到达时间进行修正,得到预计到达时间,包括:根据所述道路通行状态判断是否存在不可通行路段;若存在不可通行路段,则对所述初始到达时间进行调整,得到预计到达时间为0;若不存在不可通行路段,则根据所述道路维护状态确定维护道路段及维护道路距离值;获取所述维护道路段内第一平均行驶速度值;根据所述第一平均行驶速度值及所述维护道路距离值,计算得到维护道路通过时间;通过所述维护道路通过时间对所述初始到达时间进行修正,得到预计到达时间。
12.通过采用上述技术方案,若路段不可通行,则将预计到达时间调整为0,有利于提醒用户此路段无法通行;若路段可通行,则基于道路维护状态计算维护道路通过时间,并通过维护道路通过时间对初始到达时间进行修正,得到预计到达时间,即预计到达时间基于道路状态进行灵活调整,从而有利于提高预计到达时间的准确性,进而有利于提升用于体验感。
13.可选的,所述道路状态包括交通事故状态和道路通行状态,所述根据所述道路状态对所述初始到达时间进行修正,得到预计到达时间,还包括:若不存在不可通行路段,则根据所述交通事故状态确定交通事故路段及交通事故影响距离值;获取所述交通事故路段内第二平均行驶速度值;根据所述第二平均行驶速度值及所述交通事故影响距离值,计算得到交通事故道路通行时间;通过所述交通事故道路通行时间对所述初始到达时间进行修正,得到预计到达时间。
14.通过采用上述技术方案,若路段可通行,则基于交通事故状态计算交通事故道路通行时间,并通过交通事故道路通行时间对初始到达时间进行修正,得到预计到达时间,即预计到达时间基于交通事故状态进行灵活调整,从而有利于提高预计到达时间的准确性,进而有利于提升用于体验感。
15.可选的,所述通过所述维护道路通过时间对所述初始到达时间进行修正,得到预计到达时间,包括:获取正常通行时的预设的第三平均行驶速度值;将所述维护道路距离值除以所述第三平均行驶速度值,得到第一正常行驶时间;将所述初始到达时间减所述第一正常行驶时间得到第一剩余时间;将所述第一剩余时间与所述维护道路通过时间相加得到预计到达时间;所述通过所述交通事故道路通行时间对所述初始到达时间进行修正,得到预计到达时间,包括:将所述交通事故影响距离值除以所述第三平均行驶速度值,得到第二正常行驶时间;将所述初始到达时间减所述第二正常行驶时间得到第二剩余时间;将所述第二剩余时间与所述交通事故道路通行时间相加得到预计到达时间。
16.通过采用上述技术方案,通过维护道路通过时间对初始到达时间进行修正,得到预计到达时间即首先计算正常通行时的第一正常行驶时间和初始到达时间,后通过初始到达时间、第一正常行驶时间与第一剩余时间,得到预计到达时间;通过交通事故道路通行时间对初始到达时间进行修正,得到预计到达时间同样首先计算正常通行时的第二正常行驶时间和初始到达时间,后通过初始到达时间、第二正常行驶时间与第二剩余时间,得到预计到达时间。
17.第二方面,本技术提供的一种多地图的导航系统采用如下的技术方案:一种多地图的导航系统,包括存储器和处理器,所述存储器存储有多地图的导航方法程序,所述处理器用于在执行程序时采用上述多地图的导航方法。
18.第三方面,本技术提供的一种存储介质采用如下的技术方案:一种存储介质,存储有能够被处理器加载并执行如上述多地图的导航方法的计算机程序。
19.综上所述,本技术具有以下至少一种有益技术效果:1.通过筛选时间最短的预计到达时间对应的基础路线,有利于通过多地图为驾驶员筛选出时间最短的最终路线,同时有利于增加筛选的准确性有利于增加用户体验感。
20.2.预计到达时间基于道路状态进行灵活调整,从而有利于提高预计到达时间的准确性,进而有利于提升用于体验感。
附图说明
21.图1是本技术实施例一种多地图的导航方法的整体流程图。
22.图2是本技术实施例一种多地图的导航方法中计算得到每一条基础路线对应的预计到达时间的流程图。
23.图3是本技术实施例一种多地图的导航方法中根据道路状态对初始到达时间进行修正,得到预计到达时间的流程图。
24.图4是本技术实施例一种多地图的导航方法中根据道路状态对初始到达时间进行修正,得到预计到达时间的另一流程图。
具体实施方式
25.本技术实施例公开一种多地图的导航方法。
26.参照图1,一种多地图的导航方法包括:s100、基于当前位置节点和结束位置节点,根据每一个地图规划得到对应的一条基础路线。
27.本实施例基于车载导航仪内置多个电子地图进行说明,即地图有若干,用户可根据个人习惯使用地图,有效增加用户体验感。
28.当前位置节点与结束位置节点为人为预先录入,其中基础路线为每一个地图规划的最佳路线,即一个基础路线对应一个地图。具体的,地图规划路线需首先获取起点和终点的经纬度,后基于地址解析服务,通过用户输入的当前位置节点与结束位置节点获取当前位置节点和结束位置节点的经纬度,再通过经纬度规划路线。由于地图基于基于当前位置节点和结束位置节点规划路线的技术已被广泛使用,故在此不再赘述。
29.s200、根据每一个地图的地图信息获得对应的每一条基础路线的路线信息。
30.地图信息包括路线信息、地址信息和地形信息等,本实施例中,路线信息为地图实时获取。
31.s300、根据每一条基础路线的路线信息计算得到每一条基础路线对应的预计到达时间。
32.基于地图实时获取的路线信息计算得到预计到达时间,有利于提高预计到达时间的准确性。具体的,预计到达时间指车辆在基础路线上行驶时,从当前位置节点到结束位置节点之间路程预计花费的时间。
33.具体的,路线信息包括路线距离值,根据每一条基础路线的路线信息计算得到每一条基础路线对应的预计到达时间,包括:s310、根据每一条基础路线的路线信息得到每一条基础路线的路线距离值。
34.本实施例中,路线信息包括路线距离值和道路状态。路线距离值指当前位置节点与结束位置节点之间的基础路线的距离值。
35.s320、获取预设平均行驶速度值,根据预设平均速度值及每一条基础路线的路线距离值,计算得到每一条基础路线对应的预计到达时间。
36.平均行驶速度值为预设,即首先获取基于道路侧的其中一个车速检测器在一段时间内检测的车辆速度,并将若干车辆速度相加的和除以车辆数量得到车速检测器所在路段的平均行驶速度值。后基于预设平均速度值及每一条基础路线的路线距离值,计算得到每一条基础路线对应的预计到达时间。
37.参照图2,路线信息还包括道路状态,获取预设平均行驶速度值,根据预设平均速度值及每一条基础路线的路线距离值,计算得到每一条基础路线对应的预计到达时间,包括:s321、获取预设平均行驶速度值。
38.s322、根据每一条基础路线的路线信息得到道路状态。
39.本实施例中,道路状态包括道路维护状态、道路通行状态和交通事故状态。
40.s323、根据预设平均速度值及每一条基础路线的路线距离值,计算得到初始到达
时间。
41.初始到达时间为路线距离值除以平均速度值。
42.s324、根据道路状态对初始到达时间进行修正,得到预计到达时间。
43.由于道路状态会影响预计到达时间,故基于道路状态对初始到达时间进行修正,得到预计到达时间,有利于使预计到达时间更准确。
44.参照图3,道路状态包括道路维护状态和道路通行状态,根据道路状态对初始到达时间进行修正,得到预计到达时间,包括:s3240、根据道路通行状态判断是否存在不可通行路段。
45.不可通行指由于道路修理、突发事故等原因造成的路段不可通行,即不可通行路段指车辆需绕行行驶的路段。本实施例中,道路通行状态由被执行主体实时获取。
46.s3241、若存在不可通行路段,则对初始到达时间进行调整,得到预计到达时间为0。
47.若存在不可通行路段,则被执行主体调整初始到达时间,将预计到达时间调整为0 ,即表明当地图显示预计到达时间为0时,表明基础路线不可通行,车辆需绕行行驶。
48.s3242、若不存在不可通行路段,则根据道路维护状态确定维护道路段及维护道路距离值。
49.若路段可通行,则基于道路状态确定维护道路段及维护道路距离值,用于为后续计算维护道路通行时间做准备。
50.s3243、获取维护道路段内第一平均行驶速度值。
51.第一平均行驶速度值为预设,即首先获取基于维护道路侧的其中一个车速检测器在一段时间内检测的车辆速度,并将若干车辆速度相加的和除以车辆数量得到车速检测器所在路段的第一平均行驶速度值。
52.s3244、根据第一平均行驶速度值及维护道路距离值,计算得到维护道路通过时间。
53.在道路维护中,由于可能占用道路进行维护,故道路维护可能造成堵车现象,即车辆在经过道路维护路段时,速度将降低,即会延长经过道路维护路段的车辆到达结束位置节点的时间,此时被执行主体根据第一平均行驶速度值及维护道路距离值,计算得到维护道路通过时间。
54.s3245、通过维护道路通过时间对初始到达时间进行修正,得到预计到达时间。
55.由于道路维护状态会影响车辆预计到达时间,故基于道路维护通过时间对初始到达时间进行修正,得到预计到达时间,有利于使预计到达时间更准确。
56.参照图4,道路状态包括交通事故状态和道路通行状态,道路状态包括交通事故状态和道路通行状态,根据道路状态对初始到达时间进行修正,得到预计到达时间,还包括:s3246、若不存在不可通行路段,则根据交通事故状态确定交通事故路段及交通事故影响距离值。
57.若路段可通行,则基于交通事故状态确定交通事故路段及交通事故影响距离值,用于为后续计算交通事故道路通行时间做准备。
58.s3247、获取交通事故路段内第二平均行驶速度值。
59.与步骤s3243相似,第二平均行驶速度值为预设,即首先获取基于交通事故路段侧的其中一个车速检测器在一段时间内检测的车辆速度,并将若干车辆速度相加的和除以车辆数量得到车速检测器所在交通事故路段的第二平均行驶速度值。
60.s3248、根据第二平均行驶速度值及交通事故影响距离值,计算得到交通事故道路通行时间。
61.在交通事故路段中,由于道路上交通事故会占用部分道路,故交通事故路段可能造成堵车现象,即车辆在经过交通事故路段时,速度将降低,即会延长经过交通事故路段的车辆到达结束位置节点的时间,此时被执行主体根据第二平均行驶速度值及交通事故影响距离值,计算得到交通事故道路通行时间。
62.s3249、通过交通事故道路通行时间对初始到达时间进行修正,得到预计到达时间。
63.由于交通事故状态会影响车辆预计到达时间,故基于交通事故道路通行时间对初始到达时间进行修正,得到预计到达时间,有利于使预计到达时间更准确。
64.具体的,通过维护道路通过时间对初始到达时间进行修正,得到预计到达时间,包括:s330、获取正常通行时的预设的第三平均行驶速度值。
65.与步骤3243与步骤s3247均相似,第三平均行驶速度值基于维护道路侧车速检测器检测的若干车速进行获取。
66.s340、将维护道路距离值除以第三平均行驶速度值,得到第一正常行驶时间。
67.第一正常行驶时间指维护道路路段正常通行时车辆通行所需的时间。
68.s350、将初始到达时间减第一正常行驶时间得到第一剩余时间。
69.初始到达时间指维护路段正常通行时预计所需的通行时间。
70.s360、将第一剩余时间与维护道路通过时间相加得到预计到达时间。
71.通过交通事故道路通行时间对初始到达时间进行修正,得到预计到达时间,包括:s331、将交通事故影响距离值除以第三平均行驶速度值,得到第二正常行驶时间。
72.第二正常行驶时间指交通事故路段正常通行时车辆通行所需的时间。
73.s341、将初始到达时间减第二正常行驶时间得到第二剩余时间。
74.s351、将第二剩余时间与交通事故道路通行时间相加得到预计到达时间。
75.参照图1,s400、筛选得到时间最短的预计到达时间对应的基础路线,作为最终路线。
76.筛选时间最短的预计到达时间对应的基础路线,有利于通过多地图为驾驶员筛选出时间最短的最终路线,便于增加用户体验感。
77.s500、将最终路线进行显示。
78.具体的,被执行主体将最终路线显示于车载导航仪上。
79.本技术实施例一种多地图的导航方法的实施原理为:根据每一个地图的地图信息,获得对应的每一条基础路线的路线信息,用于通过若干路线信息,计算得到若干预计到达时间,筛选时间最短的预计到达时间对应的基础路线,有利于通过多地图为驾驶员筛选出时间最短的最终路线,便于增加用户体验感。
80.本技术实施例还公开一种多地图的导航系统。
81.一种多地图的导航系统,包括存储器和处理器,所述存储器存储有多地图的导航方法程序,所述处理器用于在执行程序时采用上述多地图的导航方法。
82.本技术实施例还公开一种存储介质。
83.一种存储介质,存储有能够被处理器加载并执行如上述多地图的导航方法的计算机程序。
84.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。