1.本发明属于电力系统线路故障定位技术领域。
背景技术:
2.输电线路故障定位的研究具有较大的工程价值和实际意义,同步相量测量装置(synchronous phasor measurement unit,pmu)技术已在电力系统中得到成熟应用。由于pmu价格昂贵,因此有必要研究有限同步相量测量装置pmu下的输电线路准确的故障定位方法。
3.目前线路故障定位文献多数将各测量值表示为故障位置的函数,通过静态状态估计、牛顿-拉夫逊等方法求解故障点位置。但是已有故障定位文献多数将测量噪声当作高斯白噪声。文献“zhao j.a robust dynamic state and parameter estimation framework for smart grid monitoring and control[d].virginia tech,2018”指出,根据来自美国pacific northwest national laboratory的同步相量测量装置pmu数据,得到同步相量测量装置pmu电压电流幅值误差不是标准的高斯分布,其中出现两个峰值,即非高斯噪声,文献“王义,孙永辉,南东亮,王开科,侯栋宸.考虑参数不确定性影响的发电机动态状态估计方法[j].电力系统自动化,2020,44(04):110-118”也指出由通信信道噪声会造成同步相量测量装置pmu量测量的噪声污染,偏离了高斯分布的假设。
[0004]
文献“fu j,song g,de schutter b.influence of measurement uncertainty on parameter estimation and fault location for transmission lines[j].ieee transactions on automation science and engineering,2020,18(1):337-345”分析了测量不确定度对输电线路参数估计和故障测距的影响,利用最大似然法来降低测量的不确定度,但是将测量参数误差假设为服从正态分布,存在一定的局限性。
[0005]
文献“张生鹏.有限同步相量测量装置pmu下基于估计和节点故障注入电流的广域后备保护研究[d].西南交通大学,2021”研究了利用广域通信网络收集电网中各区域边界同步相量测量装置pmu节点的电压,计算每个区域中未布置同步相量测量装置pmu节点的正序电压,给出确定故障区域和故障线路的方法,该文献还利用注入电流和电压的正序分量,建立线性的故障定位方程,求解出线路故障位置,但是由于该故障定位模型没有考虑线路的对地导纳,其建立的故障定位方程是线性的,相应的抗噪声干扰的能力不强,求解精度也有待于提高。
[0006]
已有文献较少考虑非高斯分布噪声、随机噪声、异常大数对故障定位准确性的不利影响,在实际工程应用中存在一定的鲁棒性不足。
技术实现要素:
[0007]
本发明的目的是提供了一种输电线路鲁棒故障定位方法,它能够有效地解决各种故障情景下精确故障定位、且不受故障位置、故障类型、过渡电阻影响的技术问题。
[0008]
本发明的目的是通过以下技术方案来实现的,一种输电线路鲁棒故障定位方法,
步骤如下:
[0009]
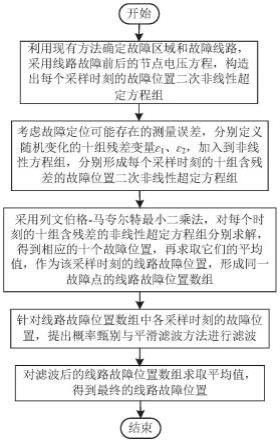
步骤一、通过广域通信网络实时收集电网中每个区域的各边界节点上的同步相量测量装置pmu的电压,对于每个区域中没有布置同步相量测量装置pmu的节点,则利用现有的计算方法确定它们的电压,进而确定故障区域和其中的故障线路;针对故障线路发生故障后第2个到第3个周波期间的每个采样时刻,利用电网中各节点的正序电压,分别建立故障前、后的节点电压方程,通过推导,构造出每个采样时刻的原始故障位置二次非线性超定方程组;
[0010]
步骤二、每个采样时刻的原始故障位置二次非线性超定方程组包含两个方程,因故障定位存在的测量误差给方程组带来影响,综合考虑测量误差,定义残差变量ε1、残差变量ε2,它们的随机变化范围是[-0.015,-0.005]∪[0.005,0.015]区间,将它们加入到原始故障位置二次非线性超定方程组中两个方程的等号右边,形成一组含残差变量的故障位置二次非线性超定方程组;然后同样处理,继续定义九组残差变量ε1、残差变量ε2,再将它们分别加入到原始故障位置二次非线性超定方程组中两个方程的等号右边,总共形成十组含残差变量的故障位置二次非线性超定方程组;
[0011]
步骤三、采用列文伯格-马夸尔特非线性最小二乘法,分别对每个时刻的十组含残差变量的故障位置二次非线性超定方程组进行求解,得到相应的十个故障位置,再求取它们的平均值,作为该采样时刻的线路故障位置;将各采样时刻的线路故障位置形成同一故障点的线路故障位置数组x;
[0012]
步骤四、针对线路故障位置数组x中每个采样时刻的故障位置,提出概率甄别与平滑滤波方法进行滤波,先采用基于概率分布原理,甄别出异常数据;再对每个异常数据进行平滑滤波处理并进行替换;处理完每个采样时刻的故障位置,得到滤波后同一个故障点的线路故障位置数组xr;
[0013]
步骤五、对滤波后的线路故障位置数组xr求取平均值,得到最终的线路故障位置。
[0014]
所述的针对线路故障位置数组x中各采样时刻的线路故障位置,提出概率甄别与平滑滤波方法进行滤波,具体如下:
[0015]
针对线路故障位置数组x,设l是数组x的长度,l=60,分别从线路故障位置数组x中剔除幅值最大和最小的四个线路故障位置,得到数组x
′
=[x
′1,x
′2…
,x
′m],m是数组x
′
的长度,m=52,计算数组x
′
的平均值μ为:
[0016][0017]
式中,x
′
τ
是数组x
′
中第τ个元素;
[0018]
计算数组x
′
的标准均方差σ为:
[0019][0020]
根据概率分布原理,即一个数组平均值的1倍标准均方差之内的数据占68.27%;本发明将数组平均值的1倍标准均方差之外的数据判断为异常数据或离群数据,再对它们进行平滑处理,以便抑制它们;
[0021]
对于线路故障位置数组x中第h个数据xh,1≤h≤l,如果数据xh在区间[μ-σ,μ σ]之
外,就将该数据xh判断为异常数据;
[0022]
对于异常数据xh,选取数组x中索引号h之前满足[μ-σ,μ σ]的前三个相邻数据x
h-3
、x
h-2
、x
h-1
,选取数组x中h之后满足[μ-σ,μ σ]的第1个相邻数据为xv,v是该数据在数组x中的索引号,h 1≤v≤l,共选取四个数据,计算它们的均值为γ,则:
[0023]
γ=(x
h-3
x
h-2
x
h-1
xv)/4(3)
[0024]
若h≤3,则选择h点前后满足[μ-σ,μ σ]的4个相邻数据,求取均值γ;
[0025]
采用均值γ去代替当前的异常数据xh。
[0026]
与现有技术相比本发明的有益技术效果为:
[0027]
本发明利用已有方法在有限同步相量测量装置pmu下确定出故障区域和故障线路,再考虑线路的对地导纳,采用故障前后的节点电压方程,建立故障位置二次非线性超定方程组,线路的对地导纳的引入有利于故障位置求解模型的精确性。
[0028]
在电网运行过程中,线路参数和测量数据受天气和地理因素的影响,因此本发明计及线路参数和测量误差,对故障位置二次非线性超定方程组引入残差变量,再利用列文伯格-马夸尔特方法求解方程组,这样求解得到的故障位置充分考虑了测量误差、线路参数对故障定位结果的影响,使得本方法具有较好的测量误差、参数误差的容错能力。
[0029]
针对故障定位中可能存在的噪声、异常大数,提出概率甄别与平滑滤波方法,对各时刻的故障位置进行滤波处理,得到最终精确的故障位置。这样可有效地抑制由噪声、异常大数给故障位置求解带来的干扰,使得求解的故障位置更准确。
附图说明
[0030]
图1为本发明流程图。
[0031]
图2为本发明线路l
ij
发生故障时的电网结构示意图。
[0032]
图3为本发明实施例ieee39节点测试系统。
[0033]
图4为本发明实施例29节点电压加入20db高斯白噪声下电压曲线。
[0034]
图5为本发明实施例29节点电压加入20db高斯白噪声下故障定位结果曲线。
[0035]
图6为本发明实施例不同滤波方法下的故障定位结果曲线。
具体实施方式
[0036]
本发明使用分布参数线路模型。如果在线路l
ij
的f点发生故障,设故障点f和节点i之间的长度与线路l
ij
全长的比值为故障位置x,x为未知变量,故障点f和节点j之间的长度与线路l
ij
全长的比值为(1-x),b
ij
是线路l
ij
的对地导纳,jxb
ij
/2表示故障点f到节点i的线路对地导纳,j(1-x)b
ij
/2为故障点f到节点j的线路对地导纳,z
ij
为线路l
ij
的阻抗。
[0037]
对于正序网络,假设一个电网的节点个数为n,n为正整数,线路l
ij
故障前电网的节点电压方程表示为:
[0038][0039]
式中,变量上标0表示是故障前的电压、电流,是各节点的正序电压,是各节点的注入电流,y是节点导纳矩阵;
[0040]
设线路l
ij
中间的f点发生故障,考虑在节点导纳矩阵y中加入故障点f,设它为第n 1个节点,在故障发生前,故障点f的注入电流为0,则发生故障前具有n 1个节点的节点电压方程表示为:
[0041][0042]
式中,扩展的节点导纳矩阵y
′
中元素上标中撇号
′
表示增加故障点f后发生改变的导纳元素,包括y
′
ii
、y
′
ij
、y
′
ji
、y
′
jj
及新增的导纳元素y
′
i(n 1)
、y
′
(n 1)
i、y
′
j(n 1)
、y
′
(n 1)j
、y
′
(n 1)(n 1)
,它们分别如下:
[0043][0044]
当线路l
ij
发生故障后,具有n 1个节点的系统的节点电压方程表示为:
[0045][0046]
式中,u
′
、i
′
是故障后各节点的正序电压、注入电流,是故障点f的注入电流;
[0047]
将式(7)减去式(5),得到:
[0048][0049]
式中,是各节点的正序电压故障分量,是故障点f的正序电压故障分量,
[0050]
将式(8)的第i行展开,得到:
[0051][0052]
将式(8)的第j行展开,得到:
[0053][0054]
对式(9)变换,式(9)方程左边只保留第i、j、n 1项,这三项包含未知变量x、未知变量其余各项都是已知变量,将它们右移到方程右边,即:
[0055][0056]
令
[0057]
将式(11)改写为:
[0058][0059]
同理,对式(10)变换,式(10)方程左边只保留第i、j、n 1项,这三项包含有未知变量x、未知变量其余各项都是已知变量,将它们右移到方程右边,即:
[0060]
[0061]
令
[0062]
将式(13)改写为:
[0063][0064]
将式(6)代入式(12),得到:
[0065][0066]
整理为:
[0067][0068]
令
[0069]
将式(16)改写为:
[0070][0071]
式(17)两边分别乘以x,得到:
[0072][0073]
同理,将式(6)代入式(14),得到:
[0074][0075]
整理为:
[0076][0077]
令
[0078]
将式(20)改写为:
[0079][0080]
式(21)两边分别乘以(1-x),得到:
[0081][0082]
将式(18)减去式(22),消去未知变量得到:
[0083]
[0084]
整理为关于故障位置x的复数系数一元二次方程:
[0085][0086]
令:
[0087][0088][0089][0090]
式(24)变成关于故障位置x的复数系数一元二次方程:
[0091]
ax2 bx c=0(25)
[0092]
分别取方程(25)中复数系数的实部系数a1、b1、c1、虚部系数a2、b2、c2,得到两个一元二次方程,形成原始故障位置二次非线性超定方程组,如下:
[0093][0094]
步骤二、每个采样时刻的原始故障位置二次非线性超定方程组包含两个方程,因故障定位存在的测量误差给方程组带来影响,综合考虑测量误差,定义残差变量ε1、残差变量ε2,它们的随机变化范围是[-0.015,-0.005]∪[0.005,0.015]区间,将它们加入到原始故障位置二次非线性超定方程组中两个方程的等号右边,形成一组含残差变量的故障位置二次非线性超定方程组;然后同样处理,继续定义九组残差变量ε1、残差变量ε2,再将它们分别加入到原始故障位置二次非线性超定方程组中两个方程的等号右边,总共形成十组含残差变量的故障位置二次非线性超定方程组;
[0095]
采用最小二乘法,对式(26)的二次非线性超定方程组进行求解,可获得故障线路的故障位置x,但是式(26)并没有考虑实际工程中可能存在的测量误差。
[0096]
本发明考虑测量误差的影响,引入残差变量ε1、ε2,分别加入到二次非线性超定方程组式(26)的两个方程的等号右边,得到式(27):
[0097][0098]
式中,残差变量ε1、残差变量ε2的取值范围为[-0.015,-0.005]∪[0.005,0.015]。
[0099]
针对线路故障后第2个到第3个周波期间的每个采样时刻,按照式(27)形成一组含残差变量的故障位置二次非线性超定方程组;然后同样处理,再定义九组残差变量ε1、残差变量ε2,分别加入到原始故障位置二次非线性超定方程组的两个方程的等号右边,总共形成十组含残差变量的故障位置二次非线性超定方程组,如下:
[0100][0101]
式中,ε
1_q
、ε
2_q
均为[-0.015,-0.005]∪[0.005,0.015]之间的随机数,q表示第q组
方程组,q=1,2,...,10。
[0102]
步骤三、采用列文伯格-马夸尔特非线性最小二乘法,分别对每个时刻的十组含残差变量的故障位置二次非线性超定方程组进行求解,得到相应的十个故障位置,再求取它们的平均值,作为该采样时刻的线路故障位置;将各采样时刻的线路故障位置形成同一故障点的线路故障位置数组x;
[0103]
步骤四、针对线路故障位置数组x中每个采样时刻的故障位置,提出概率甄别与平滑滤波方法进行滤波,先基于概率分布原理,甄别出异常数据;再对每个异常数据进行平滑滤波处理,并进行替换;处理完每个采样时刻的故障位置,得到滤波后同一个故障点的线路故障位置数组xr;
[0104]
针对线路故障位置数组x,设l是数组x的长度,l==60,分别从线路故障位置数组x中剔除幅值最大和最小的四个线路故障位置,得到数组x
′
=[x
′1,x
′2…
,x
′m],m是数组x
′
的长度,m=52,计算数组x
′
的平均值为:
[0105][0106]
式中,x
′
τ
是数组x
′
中第τ个元素;
[0107]
计算数组x
′
的标准均方差σ为:
[0108][0109]
根据概率分布原理,即一个数组平均值的1倍标准均方差之内的数据占68.27%,本发明将数组平均值的1倍标准均方差之外的数据判断为异常数据或离群数据,再对它们进行平滑处理,以便抑制它们;
[0110]
对于线路故障位置数组x中第h个数据xh,1≤h≤l,如果数据xh在区间[μ-σ,μ σ]之外,就将该数据xh判断为异常数据;
[0111]
对于异常数据xh,选取数组x中索引号h之前满足[μ-σ,μ σ]的前三个相邻数据x
h-3
、x
h-2
、x
h-1
,选取数组x中h之后满足[μ-σ,μ σ]的第1个相邻数据为xv,v是该数据在数组x中的索引号,h 1≤v≤l,共选取四个数据,计算它们的均值为γ,则:
[0112]
γ=(x
h-3
x
h-2
x
h-1
xv)/4(3)
[0113]
若h≤3,则选择h点前后满足[μ-σ,μ σ]的4个相邻数据,求取均值γ;
[0114]
采用均值γ去代替当前的异常数据xh;
[0115]
处理完每个采样时刻的故障位置,得到滤波后同一个故障点的线路故障位置数组xr;
[0116]
步骤五、对滤波后的线路故障位置数组xr求取平均值,得到最终的线路故障位置
[0117][0118]
式中,x
ru
是数组xr中第u个数据,l是数组xr的长度,l=60。
[0119]
由于故障位置数组x为离散数组,常用的卡尔曼滤波在当前值严重偏离均值、不在[μ-σ,μ σ]范围内(如异常大数)时,其预测值的准确度不高。本发明所提的概率甄别与平滑
滤波方法,利用当前采样时刻前后的数据,能够较好地消除噪声和异常大数等对故障定位的影响。
[0120]
为验证本发明所提三位输电线路鲁棒故障定位方法的性能,需要考虑线路在实际工作状态下可能出现的各种故障情况,因此在图3ieee 39节点测试系统中设置不同过渡电阻、故障位置、不同故障类型下的线路故障,图3给出了一种同步相量测量装置pmu布局方式,通过仿真结果来验证本输电线路鲁棒故障定位方法的准确性。采样频率为3khz,系统频率为60hz,故障类型分为a相接地短路故障ag、a相与b相短路故障ab、a相与b相接地短路故障abg、三相接地短路故障abc。
[0121]
故障定位误差定义如下:
[0122][0123]
不同故障类型、过渡电阻、位置下线路26-29发生故障的定位结果见表1,其中第3列是线路26-29中距离节点26预置的故障位置,它是故障点和节点26之间的长度与线路全长的比值,第4列是本发明求解的故障位置。
[0124]
表1不同故障类型、过渡电阻、位置下线路26-29发生故障的定位结果
[0125][0126]
从表1可看到,本发明所提的方法不受故障类型,过渡电阻及故障位置的影响,定位精度高,定位误差在1%以下,满足工程定位要求。
[0127]
不同线路在过渡电阻300ω下不同位置发生a相短路故障的故障定位结果见表2,表2中l
26-29
表示线路26-29发生故障,左侧为线路起点编号、右侧为线路终点编号,表2中第2列表头“预设故障位置0.1”表示预设故障点和线路起点之间的长度与线路全长的比值为0.1;表2中第3列表头“预设故障位置0.5”表示预设故障点和线路起点之间的长度与线路全长的比值为0.5,表2中第4列表头“预设故障位置0.9”表示预设故障点和线路起点之间的长度与线路全长的比值为0.9;表2中第2、3、4列数据为本发明求解的故障位置。
[0128]
从表2可看到,本发明所提方法适用于各条线路故障,不受故障位置的影响,具有较高的定位精度。
[0129]
表2不同线路在过渡电阻300ω下不同位置发生a相短路故障的故障定位结果
[0130][0131]
在实际工程应用中线路参数和测量值可能存在一定的偏差或误差。通过设置相应仿真来验证所提方法对系统参数和测量误差的容错能力,表3设置线路26-29节点导纳偏移,线路26-29中故障点和节点26的长度与全长的比值0.1处发生ag故障,过渡电阻300ω,表4设置线路26-29中故障点和节点26的长度与全长的比值0.5处发生ag故障,过渡电阻300ω,节点26的电压发生偏移。
[0132]
从表3可看到,线路测量参数发生偏移对本发明所提方法具有一定的影响,但是即使表3的节点26导纳的偏移量达到10%,线路故障定位的误差仍不超过2%,即使表4中节点26的电压偏移量达到5%,线路故障定位的误差才达到2.59%,本发明具有较好的抗线路参数偏移、测量误差的容错能力。
[0133]
表3线路26-29的节点26发生导纳偏移时的故障定位结果
[0134][0135]
表4线路26-29的节点26电压发生偏移时的故障定位结果
[0136][0137]
输电线路故障定位可能存在随机干扰、异常大数,为了克服它们对输电线路定位方法的不足,本发明提出概率甄别和平滑滤波方法,对异常数据进行甄别和滤波处理。
[0138]
为验证随机噪声和异常大数对故障定位方法的影响,分别仿真在线路26-29故障时节点29电压存在20db噪声、5个随机异常大数的情况。
[0139]
表5为线路26-29不同位置发生ag故障时节点29电压加入20db高斯白噪声的故障定位结果,表5中第3列是线路26-29中距离节点26预置的故障位置,它是故障点和节点26之间的长度与线路全长的比值,表6为线路26-29不同位置发生ag故障时节点29电压加入20db噪声、并有5个随机异常大数的故障定位结果,表6中第3列是线路26-29中距离节点26预置的故障位置,它是故障点和节点26之间的长度与线路全长的比值。
[0140]
表5线路26-29不同位置发生ag故障时节点29电压加入20db噪声的故障定位结果
[0141][0142]
表6线路26-29不同位置发生ag故障时节点29电压加入20db噪声、并有5个随机异常大数的故障定位结果
[0143][0144]
从表5和表6可看到,本发明所提方法具有较好的抗噪声和异常大数的能力,具有较强的鲁棒性。
[0145]
为进一步验证本发明所提方法在抗噪声和异常大数上的有效性,本发明选择了当前工程中常用的卡尔曼滤波法进行对比实验。
[0146]
图4为线路26-29发生ag故障时节点29电压加入20db噪声和未加噪声的电压幅值曲线,从图4看出,在加入20db噪声后节点29电压幅值发生了较大的畸变。
[0147]
图5为线路26-29发生ag故障时节点29电压加入20db高斯噪声和未加噪声的故障位置曲线,从图5可看到,在0.3ms时刻发生故障后第一个周波是一个暂态过程,即在0.3ms~0.317ms之间故障位置波动较大。在故障后第2个和第3个周波即0.317ms~0.337ms之间故障位置处于稳定状态,故障定位结果波动较小,因此本发明选用故障后第2个周波和第3个周波0.317ms~0.337ms之间的数据进行故障定位。
[0148]
图6为线路26-29发生ag故障时第2个周波20ms内60个采样时刻的故障位置,其中,
x-noise是在节点29电压加入20db噪声下利用本发明故障定位方法、但没有概率甄别与平滑滤波求得的故障位置曲线;
[0149]
x-aln是在节点29电压加入20db噪声、并加入随机5个畸变数据下利用本发明方法、但没有概率甄别与平滑滤波求得的故障位置曲线;
[0150]
x-kf是在节点29电压加入20db噪声、并加入随机5个畸变数据下利用本发明方法、采用卡尔曼滤波求得的故障位置曲线;
[0151]
x-psf是在节点29电压加入20db噪声、并加入随机5个畸变数据下利用本发明方法、采用本发明的概率甄别和平滑滤波求得的故障位置曲线。
[0152]
图6中滤波结果如表7所示,从表7可看到,相比于卡尔曼滤波,本发明所提的概率平滑滤波对随机噪声和异常大数的过滤能力较强,定位误差在1%以下,故障定位精确度更高,具有较强的工程价值。
[0153]
表7线路26-29发生ag故障时节点29电压加入20db噪声、并有5个随机异常大数下不同滤波方法的故障定位结果
[0154]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。