一种基于车辆gps数据的驾驶员异常变速辨识方法
技术领域
1.本发明属于城市交通安全技术领域,具体涉及一种基于车辆gps数据的驾驶员异常变速辨识方法。
背景技术:
2.根据世界卫生组织《global status report on road safety》数据报告显示,全球每年约有135万人因道路交通事故死亡,其中,因驾驶员突发状况或者干扰驾驶行为而造成人员伤亡的事故呈上升趋势。因此在车辆行驶过程中对行驶状态进行监测,使其处于异常状态时可以对驾驶员进行预警或者采取紧急制动措施以保证驾驶员以及乘客的安全是尤为重要的。
3.目前的驾驶员安全驾驶检测技术多是基于监测驾驶员的一种或多种控制活动(例如:加速、制动、转向等)来检测车辆的状态。而随着数据科学和数据挖掘技术的高速发展,驾驶员的安全驾驶行为不在局限于通过实时监测等方法进行评价,而更加偏向于通过驾驶员驾驶行为状态的海量异构数据,客观定量地对驾驶员的安全属性进行评价。
4.驾驶员因素是交通安全的最主要因素,如何科学客观识别驾驶员的异常变速行为,从而公正地评判驾驶员的安全驾驶水平,提升驾驶风险的主动防控能力,对于提升公共交通总体安全性具有重要意义。因此,本发明设计了一种基于车辆gps数据的驾驶员异常变速辨识方法。
技术实现要素:
5.发明目的:为了提升驾驶安全评价水平,本发明提出一种基于车辆gps数据的驾驶员异常变速辨识方法,基于车辆gps数据,拟合驾驶员的安全变速动态阈值方程,从而方便识别驾驶员的异常变速行为,识别结果能够客观评判驾驶员的安全驾驶水平。
6.技术方案:本发明提供一种基于车辆gps数据的驾驶员异常变速辨识方法,具体包括以下步骤:
7.(1)对预先获取的车辆gps数据进行预处理;
8.(2)离散变速阈值求解:将车辆速度、加速度作为关键指标,对gps数据的速度进行分箱处理,通过特征线法和肘部图法确定各分箱的离散加速阈值;
9.(3)动态变速阈值拟合:通过改进最小二乘法对离散阈值进行拟合得到驾驶员异常变速的动态阈值,并得到该阈值的数学方程;
10.(4)异常变速行为辨识:将动态阈值方程带入历史或实时数据,对异常变速行为加以辨识。
11.进一步地,步骤(1)所述车辆gps数据共包括6个字段,分别为车牌号、gps时间、经度、纬度、方向和速度;所述车辆gps数据经过数据清洗、数据插值、车辆转角和加速度计算后,包含车辆行驶的速度和加速度两个字段。
12.进一步地,所述步骤(2)包括以下步骤:
13.(21)速度分箱处理:对样本数据的速度范围进行分箱,以1km/h的分箱宽度进行分箱操作,此时得到的分箱数量较为合适;
14.(22)确定各分箱的加速度临界值:
15.分别取每个速度分箱内加速度的a至b分位数作为特征点,将各级分位数点依次相连可得到多条特征线,将它们作为安全变速阈值线备选位置;
16.相邻分位数特征线的间距,体现了不同特征线处加速度的绝对变化,由于相邻特征线的间距随着速度的变化发生改变,不能直观体现加速度值的跃迁程度,因此对各特征值进行标准化处理:
[0017][0018]
其中,q(i)表示第i分位数特征点加速度值组成的向量;q(u)表示最高分位数加速度值组成的向量;q(l)表示最低分位数加速度组成的向量;q’(i)表示标准化后的i分位数特征点加速度值组成的向量;
[0019]
相邻标准化特征线的间距,能够反映相邻分位点样本加速度的相对变化,考虑到不同速度区间下安全变速阈值位置可能发生变化,令速度区间r为安全变速
[0020]
阈值位置相对稳定区域,计算相邻标准化特征线间的距离,并记为标化邻差snd,具体处理公式为:
[0021][0022]
其中,dr(i)表示在速度区间r内i分位数特征线处的snd指标;表示在特定速度区间r内i分位数特征线的加速度均值;
[0023]
(23)利用肘部图法,将i分位数特征线snd依次排列,绘制折线图以呈现加速度值的跃迁点,则该折线图上升图中拐点位置的分位数特征线就是安全变速阈值的所在位置。
[0024]
进一步地,所述步骤(3)包括以下步骤:
[0025]
(31)安全变速阈值可信度求解:
[0026]
找出一个样本数量较大的分箱,将用该分箱样本总体的中随机抽取n个样本作为“子样本”计算安全变速阈值,重复m次并计算安全变速阈值均值,记作a0,每次增加l个样本并重复计算安全变速阈值均值直至子样本量到足够大,其中第k次计算安全变速阈值均值记作ak,最终收敛值记为ak对应的可信度估计值的具体计算公式如下:
[0027][0028]
构造置信度函数,该函数需要满足置信度变化的实际情况,且根据置信度的定义该函数需符合两个条件,最后构造出的可信度函数为:
[0029][0030]
式中,x为样本数量;p(x)为样本量为x时安全变速阈值的可信度;c1和c2为待定常数项,需通过实际数据拟合确定;
[0031]
(32)考虑采样点可靠度的拟合算法:
[0032]
设(x,y)是一对观测量,x=[x1
,
x2,
…
,xn]
t
且满足以下y=f(x,w),其中w=[w1,w2,
…
,wn]
t
为待定参数;
[0033]
在原有损失函数的基础上考虑采样点的可信度,对每个分箱的样本量进行可信度计算,得到可信度序列p=[p1,p2,
…
,pm]
t
;对于给定m组(m》n)观测数据(xi,yi),最小化损失函数:
[0034][0035]
拟合得到的最终阈值曲线方程为
[0036]
进一步地,所述步骤(4)实现:
[0037]
将历史数据点或实时数据的速度x、加速度y带入阈值方程若则该数据对应异常变速行为,否则不能说明变速行为存在异常。
[0038]
有益效果:与现有技术相比,本发明的有益效果:本发明是以驾驶员的实际驾驶数据为基本依据规划和拟合驾驶员变速的安全界限,不依赖于道路等级、天气情况、交通状态等复杂环境参数,具有实时性、准确性和适应性,适用于各类环境下的驾驶员异常变速识别;本发明基于gps数据进行数据挖掘,能够有效对驾驶员的异常变速行为进行辨识,实现驾驶风险的预先判断,对提升车辆加速安全性既有积极作用。
附图说明
[0039]
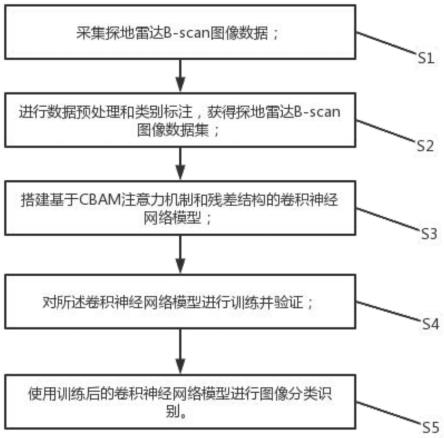
图1是本发明的流程图;
[0040]
图2是本发明样本数据速度与加速度图;
[0041]
图3是本发明处理后特征点加速度的标准化特征线图;
[0042]
图4是本发明根据肘部图法得到的安全变速阈值的基本位置图;
[0043]
图5是本发明构造的置信度函数曲线图;
[0044]
图6是本发明各分箱数据的置信度曲线图;
[0045]
图7是本发明减速阈值曲线拟合图;其中,(a)为一阶多项式拟合结果,mse为1.34;(b)为二阶多项式拟合结果,mse为0.28;(c)三一阶多项式拟合结果,mse为0.27;(d)四阶多项式拟合结果,mse为0.007;
[0046]
图8是异常加速行为与实际报警数据相关性图;其中,(a)车道偏离情况下异常加速行为与实际报警数据相关性图;(b)为前向碰撞情况下异常加速行为与实际报警数据相关性图;
[0047]
图9是异常减速行为与实际报警数据相关性图;其中,(a)为车道偏移异常减速行为与实际报警相关性;(b)为前向碰撞异常减速行为与实际报警相关性。
具体实施方式
[0048]
下面结合附图对本发明作进一步详细说明。
[0049]
如图1所示,本发明提出一种基于车辆gps数据的驾驶员异常变速辨识方法,包括以下步骤:
[0050]
步骤1:对预先获取的车辆gps数据进行预处理。
[0051]
车辆gps数据共包括6个字段,分别为:车牌号、gps时间、经度、纬度、方向和速度。车辆gps数据经过数据清洗、数据插值、车辆转角和加速度计算后,必须包含车辆行驶的速度和加速度两个字段(以下称为gps数据),字段明细如表1所示。
[0052]
表1车辆gps数据字段明细表
[0053][0054]
步骤2:离散变速阈值求解:将车辆速度、加速度作为关键指标,对gps数据的速度进行分箱处理,通过特征线法和肘部图法确定各分箱的离散加速阈值。
[0055]
首先,将速度离散化,如图2所示对样本数据的速度范围进行分箱,此时需注意分箱数量不宜过多,否则每个分箱内的数据量不足将无法得出可靠的加速度临界值;反之也不能太少,否则会大大降低模型的连续性和精度。本发明以1km/h的分箱宽度进行分箱操作,此时得到的分箱数量较为合适。
[0056]
接着,确定各分箱的加速度临界值,分别取每个速度分箱内加速度的a至b分位数作为特征点,此处a可取80km/h,b可取99km/h。将各级分位数点依次相连可得到多条特征线,将它们作为安全变速阈值线备选位置。
[0057]
相邻分位数特征线的间距,体现了不同特征线处加速度的绝对变化。由于相邻特征线的间距随着速度的变化发生改变,不能直观体现加速度值的跃迁程度,因此,应先用公式(1)对各特征值进行标准化处理。
[0058][0059]
其中,q(i)表示第i分位数特征点加速度值组成的向量;q(u)表示最高分位数加速度值组成的向量;q(l)表示最低分位数加速度组成的向量;q’(i)表示标准化后的i分位数特征点加速度值组成的向量。根据公式(1)计算特征点加速度的标准化值,得到的标准化特征线。
[0060]
如图3所示,当速度在35km/h以下时,最大和最小分位数特征线之间的特征线是混沌的,这说明此处是加速度的集中分布范围,不能作为考察异常加速行为的依据;当速度超过65km/h时,特征线波动变化较大,这主要是数据量变少导致的;当速度超过35km/h而小于
65km/h时,各特征线之间间隔分明,说明各特征线之间存在显而易见的差异,因此主要关注速度超过35km/h而小于65km/h的特征线进行分析。
[0061]
相邻标准化特征线的间距,能够反映相邻分位点样本加速度的相对变化,考虑到不同速度区间下安全变速阈值位置可能发生变化,令速度区间r为安全变速阈值位置相对稳定区域,用公式(2)计算相邻标准化特征线间的距离,并记为“标化邻差(snd)”。
[0062][0063]
其中,dr(i)表示在速度区间r内i分位数特征线处的snd;表示在特定速度区间r内i分位数特征线的加速度均值。
[0064]
最后,利用肘部图法,将i分位数特征线snd依次排列,绘制折线图以呈现加速度值的跃迁点,则该折线图上升图中拐点位置的分位数特征线就是安全变速阈值的所在位置,如图4所示。
[0065]
步骤3:动态变速阈值拟合:通过本发明保护的改进最小二乘法对离散阈值进行拟合得到驾驶员异常变速的动态阈值,并得到该阈值的数学方程。
[0066]
首先,求解安全变速阈值可信度,首先找出一个样本数量较大的分箱(基于bootstrap法的思想,分箱内的样本数量应超过8000),将用该分箱样本总体的中随机抽取n个样本作为“子样本”计算安全变速阈值,将该步骤重复m次并计算安全变速阈值均值,记作a0,每次增加l个样本并重复上述计算步骤直至子样本量到足够大,其中第k次计算安全变速阈值均值记作ak,最终收敛值记为最后用公式(3)计算ak对应的可信度估计值
[0067][0068]
由于受到随机取样误差的影响,可信度估计值存在偏差,因此需构造置信度函数,该函数需要满足置信度变化的实际情况,且根据置信度的定义该函数需符合公式4的两个条件,最后构造出的可信度函数如公式(5)所示。
[0069][0070][0071]
式中,x为样本数量;p(x)为样本量为x时安全变速阈值的可信度;c1和c2为待定常数项,需通过实际数据拟合确定。根据公式(2)—(5)得出的置信度曲线如图5所示,接着利用置信度函数计算各分箱数据的置信度如图6所示。
[0072]
接着,设(x,y)是一对观测量,x=[x1,x2,
…
,xn]
t
且满足以下函数式:
[0073]
y=f(x,w),其中w=[w1,w2,
…
,wn]
t
为待定参数;
[0074]
传统最小二乘法将各个数据的重要程度同等看待,而改进方法在原有损失函数的基础上考虑了采样点的可信度,由每个分箱的样本量带入公式(5)计算得到可信度序列p=[p1,p2,
…
,pm]
t
。为了寻找参数w的最优估计值,对于给定m组(m》n)观测数据(xi,yi),最小化损失函数:
[0075][0076]
然后,分别用1到4阶多项式对减速阈值曲线进行拟合,如图7所示,并用mse作为拟合优劣的评价指标。当m=4时,多项式能够与数据契合效果最好,mse为0.07。拟合得到的最终阈值曲线的多项式表达为:
[0077]atv
=-5.45e-07
v4 7.71e-05v3-3.18e-03v2-2.07e-02
v 4.00,mse为0.07。
[0078]
步骤四:异常变速行为辨识,将步骤三所述的动态阈值方程带入历史或实时数据,对异常变速行为加以辨识。
[0079]
利用斯皮尔曼模型检验27位公交驾驶员每日异常加速行为和异常减速行为数量同其当天的车载终端报警次数之间的相关性,分析结果分别如图8和图9所示,图8(a)是车道偏离情况下异常加速行为与实际报警数据相关性图;图8(b)为前向碰撞情况下异常加速行为与实际报警数据相关性图;图9(a)为车道偏移异常减速行为与实际报警相关性,图9(b)为前向碰撞异常减速行为与实际报警相关性。无论是异常加速行为还是异常减速行为,均与车道偏离和前向碰撞显著相关(p《0.01)。这说明公交驾驶员异常行为识别模型的对于客观行为风险具有较好的评估能力,从侧面印证了本发明的有效性和适用性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。