技术特征:
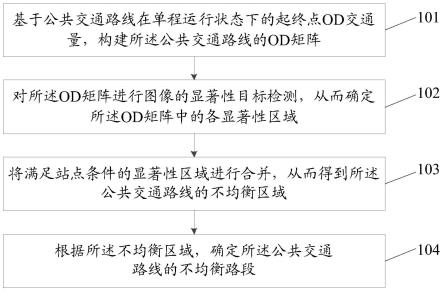
1.一种确定公共交通路线中客流不均衡路段的方法,其特征在于,包括:基于公共交通路线在单程运行状态下的起终点od交通量,构建所述公共交通路线的od矩阵;所述od矩阵中的任一元素t
ij
表示于i站点上车且在j站点下车的人数;对所述od矩阵进行图像的显著性目标检测,从而确定所述od矩阵中的各显著性区域;其中,任一显著性区域中的元素与周围区域的元素的区别程度满足设定要求;将满足站点条件的显著性区域进行合并,从而得到所述公共交通路线的不均衡区域;根据所述不均衡区域,确定所述公共交通路线的不均衡路段。2.如权利要求1所述的方法,其特征在于,所述基于公共交通路线在单程运行状态下的起终点od交通量,构建所述公共交通路线的od矩阵,包括:按照单程运行状态下各站点顺序,构建n*n的初始od矩阵,其中,所述初始od矩阵的n行分别用于表示上车的站点,n列分别用于表示下车的站点;根据所述公共交通路线在历史阶段的上下客数据,确定所述初始od矩阵中的各元素,从而得到所述od矩阵;所述od矩阵为上三角矩阵。3.如权利要求1所述的方法,其特征在于,所述对所述od矩阵进行图像的显著性目标检测之前,所述方法还包括:采用设定大小的高斯核、按照设定步长及设定方向,对所述od矩阵进行卷积操作。4.如权利要求1所述的方法,其特征在于,所述对所述od矩阵进行图像的显著性目标检测,从而确定所述od矩阵中的各显著性区域,包括:对所述od矩阵进行二维离散傅里叶变换,得到幅度谱和相位谱;根据所述幅度谱,得到残差谱;对所述残差谱和所述相位谱进行反向傅里叶变换,得到显著图;对所述显著图进行阈值判断,从而得到所述od矩阵中的各显著性区域。5.如权利要求1所述的方法,其特征在于,所述将满足站点条件的显著性区域进行合并,从而得到所述公共交通路线的不均衡区域,包括:针对任一显著性区域,若确定所述显著性区域在横方向或纵方向上小于第一设定数目的站点,且与相邻的显著性区域之间的间隔的站点数量小于第二设定数目,则将所述显著性区域与所述相邻的显著性区域进行合并,作为所述公共交通路线的不均衡区域。6.如权利要求5所述的方法,其特征在于,所述方法还包括:针对任一显著性区域,若确定所述显著性区域在横纵方向上均小于所述第一设定数目的站点,且与相邻的显著性区域之间的间隔的站点数量不小于所述第二设定数目的站点,则忽略所述显著性区域;针对任一显著性区域,若确定所述显著性区域在横方向或纵方向上大于所述第一设定数目的站点,且与相邻的显著性区域之间的间隔的站点数量不小于所述第二设定数目,则将所述显著性区域作为所述公共交通路线的不均衡区域。7.如权利要求1至6任一项所述的方法,其特征在于,所述根据所述不均衡区域,确定所述公共交通路线的不均衡路段,包括:
将所述不均衡区域的左上角元素对应的第一出发站点和第一到达站点中,按所述单程运行状态下靠前的站点作为所述不均衡路段的起点位置;将所述不均衡区域的右下角元素对应的第二出发站点和第二到达站点中,按所述单程运行状态下靠后的站点作为所述不均衡路段的终点位置。8.一种确定公共交通路线中客流不均衡路段的装置,其特征在于,包括:od矩阵构建单元,用于基于公共交通路线在单程运行状态下的起终点od交通量,构建所述公共交通路线的od矩阵;所述od矩阵中的任一元素t
ij
表示于i站点上车且在j站点下车的人数;显著性区域确定单元,用于对所述od矩阵进行图像的显著性目标检测,从而确定所述od矩阵中的各显著性区域;其中,任一显著性区域中的元素与周围区域的元素的区别程度满足设定要求;不均衡区域确定单元,用于将满足站点条件的显著性区域进行合并,从而得到所述公共交通路线的不均衡区域;不均衡路段确定单元,用于根据所述不均衡区域,确定所述公共交通路线的不均衡路段。9.一种计算机设备,其特征在于,包括:存储器,用于存储计算机程序;处理器,用于调用所述存储器中存储的计算机程序,按照获得的程序执行如权利要求1-7任一项所述的方法。10.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如权利要求1-7任一项所述的方法。
技术总结
本申请公开一种确定公共交通路线中客流不均衡路段的方法及装置,基于公共交通路线在单程运行状态下的起终点OD交通量,构建OD矩阵;对OD矩阵进行图像的显著性目标检测,从而确定OD矩阵中的各显著性区域;将满足站点条件的显著性区域进行合并,从而得到公共交通路线的不均衡区域;根据不均衡区域,确定公共交通路线的不均衡路段。由于起终点OD交通量(即OD客流)包含了具体站点客流流向信息,是一种细化的数据,因此通过使用OD客流作为计算不均衡路线及不均衡路段的指标,可以提升计算的准确度;此外,通过将OD矩阵视作二维图像信号处理,将对不均衡区域的检测视作显著性目标检测,也有助于提升计算的准确度。有助于提升计算的准确度。有助于提升计算的准确度。
技术研发人员:高威 李坤鹏 黄勇 王宝山
受保护的技术使用者:青岛海信网络科技股份有限公司
技术研发日:2022.05.11
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。