技术特征:
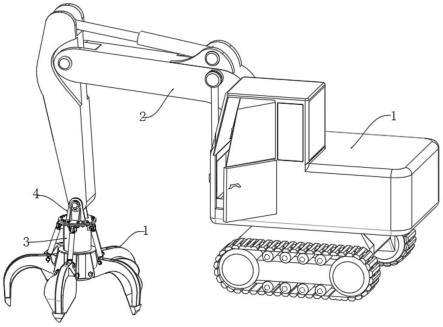
1.一种抓斗可控制的液压抓臂式清污机器人,其特征在于,包括机体(1),所述机体(1)的一侧面活动连接有液压臂(2),且液压臂(2)的一端活动连接有抓斗组件;所述抓斗组件包括支撑座(3),且支撑座(3)的顶端固定连接有驱动连接座(4),所述支撑座(3)的内部设有可伸缩吹风组件,所述驱动连接座(4)与液压臂(2)一端活动连接,所述支撑座(3)的外侧面顶端固定连接有上环板(5),且上环板(5)底端面与支撑座(3)外侧面之间固定连接有多个均匀分布的上耳板连接座(11),所述支撑座(3)的外侧面中间位置固定连接有中环板(6),且支撑座(3)的外侧面底端固定连接有下环板(7),所述中环板(6)与下环板(7)之间固定连接有多个下耳板连接座(8),多个所述下耳板连接座(8)与多个所述上耳板连接座(11)一一上下对应,且下耳板连接座(8)的内部设有抓臂(10),所述抓臂(10)的一端固定连接有转轴(9),且转轴(9)两端贯穿下耳板连接座(8)并与其活动连接,所述上耳板连接座(11)与抓臂(10)之间活动连接有液压缸(12),所述抓臂(10)的内部设有清洁组件,且抓臂(10)的底端固定连接有卡头(14),所述卡头(14)的底端设有锁紧件(34)。2.根据权利要求1所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述可伸缩吹风组件,具体包括:开设在支撑座(3)内部的伸缩腔(19),所述支撑座(3)外侧面顶端开设有多个与伸缩腔(19)连通的通气孔(20),所述伸缩腔(19)的内部活动连接有伸缩座(21),且伸缩座(21)的顶端面中心嵌有吹风扇(22),所述伸缩座(21)的内部开设有与吹风扇(22)连通的吹风腔(23),且吹风腔(23)的侧面固定连接有与其连通的出风窗(25),所述伸缩座(21)的底端固定连接有密封件用以堵住伸缩腔(19)的底端开口,所述中环板(6)的顶端面开设有多个与转轴(9)相对应的通孔(17),所述支撑座(3)的外侧面靠近顶端的位置开设有多个与通孔(17)相对应的穿孔(18),且穿孔(18)的内部贯穿设置有第一钢丝绳(16),所述第一钢丝绳(16)的一端固定在伸缩座(21)的顶端边沿,且第一钢丝绳(16)的另一端穿过通孔(17)固定在转轴(9)外侧面上。3.根据权利要求2所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述密封件,具体包括:固定在伸缩座(21)底端的浮力板(26),所述浮力板(26)的顶端面边沿固定连接有密封圈(27),且密封圈(27)的内部嵌有磁环(28)。4.根据权利要求2所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述伸缩腔(19)的内壁顶端边沿固定连接有多个外杆(35),且外杆(35)的内部开设有导向槽(37),所述导向槽(37)的内部活动连接有内杆(36),且内杆(36)底端固定在伸缩座(21)顶端面边沿并与第一钢丝绳(16)错开。5.根据权利要求2所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述吹风腔(23)的底端面中心固定连接有锥形导风座(24)。6.根据权利要求1所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述抓臂(10)的底端面固定连接有抓板(13)。7.根据权利要求1所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述清洁组件,具体包括:第二钢丝绳(29)以及开设在抓臂(10)内部的超声波震动腔(30),所述超声波震动腔(30)的内部设有多个超声波震动棒(31),且超声波震动棒(31)的两端分别与超声波震动腔(31)的两侧内壁固定连接,所述超声波震动腔(31)的内部靠近一端的位置固定连接有隔离板(32),且隔离板(32)与抓臂(10)侧壁形成隔离腔,所述隔离腔的内部固定连接有接触传感器(33),且接触传感器(33)的外部套接固定有第一弹簧柱(38),所述第一
弹簧柱(38)的一端固定连接有膜片(39),且膜片(39)靠近接触传感器(33)的一侧面固定连接有触头(40),所述第二钢丝绳(29)的一端固定在转轴(9)外侧面上,且第二钢丝绳(29)的另一端贯穿超声波震动腔(30)与隔离板(32)并与膜片(39)固定连接。8.根据权利要求7所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述抓臂(10)的两侧面活动连接有与其相匹配的清洁板(41),所述超声波震动腔(30)的内部靠近中间位置固定连接有两个并列的输出方向相反的气缸(42),两个所述气缸(42)输出端分别贯穿超声波震动腔(30)两侧内壁并与两个清洁板(41)固定连接。9.根据权利要求1所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述锁紧件(34),具体包括:开设在卡头(14)底端上的伸缩槽(3401),所述伸缩槽(3401)的内部活动连接有伸缩块(3402),且伸缩块(3402)的一端固定连接有三角块(3403),所述三角块(3403)的两侧面上均嵌有强磁铁(3404),所述伸缩块(3402)另一端与伸缩槽(3401)内壁之间固定连接有第二弹簧柱(3405)。10.根据权利要求1所述的一种抓斗可控制的液压抓臂式清污机器人,其特征在于,所述驱动连接座(4)的两侧面固定连接有两个并列的加强肋(15)。
技术总结
本发明公开了一种抓斗可控制的液压抓臂式清污机器人,属于清污机器人领域,包括机体,所述机体的一侧面活动连接有液压臂,且液压臂的一端活动连接有抓斗组件;所述抓斗组件包括支撑座,且支撑座的顶端固定连接有驱动连接座,所述支撑座的内部设有可伸缩吹风组件,所述抓臂的内部设有清洁组件,且抓臂的底端固定连接有卡头,所述卡头的底端设有锁紧件。本发明在收放抓斗组件的过程中会带动可伸缩吹风组件的升降,即闭合抓斗组件时收起可伸缩吹风组件避免其被水浸泡受损,而在张开抓斗组件放下杂物时会放出可伸缩吹风组件对抓斗组件进行吹风,配合着清洁组件的超声波震动除杂效果能够快速有效的清理上面细小杂物。能够快速有效的清理上面细小杂物。能够快速有效的清理上面细小杂物。
技术研发人员:陈荣娜 陈远龙 黄振东 梁树敏 王亚 田同贵 曹雏清 王凯
受保护的技术使用者:安徽省六安恒源机械有限公司
技术研发日:2022.05.09
技术公布日:2022/7/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。