用于无线通信的传感器辅助天线和波束选择
1.优先权要求
2.本技术根据35u.s.c.
§
119(e)要求2021年1月8日提交的美国专利申 请序列号63/135,503的优先权,该专利申请的全部内容据此以引用方式并 入本文。
技术领域
3.本公开整体涉及无线通信。
背景技术:
4.无线设备可以包括用于向远程设备发射信号和从远程设备接收信号的 相控阵列天线(例如,在无线网络中)。相控阵列包括计算机控制的天线 阵列,该计算机控制的天线阵列产生无线电波束,可以通过电子方式将该 无线电波束指向不同的方向,而无需移动天线。
5.波束成形或空间滤波是在传感器阵列中用于定向信号发射或接收的信 号处理技术。这通过以使得特定角度的信号经历相长干涉而其他信号经历 相消干涉的方式组合天线阵列中的元件来实现。波束成形可用于发射端和 接收端(例如,通过相控阵列天线)两者以实现空间选择性。波束成形允 许mm波设备将射频(rf)能量转向特定方向,从而克服mm波传播损 耗。波束通常是固定的,并且在码本中是先验设计的,诸如天线元件的相 位-幅值组合。
技术实现要素:
6.本技术描述了用于传感器辅助天线和无线网络的波束选择的系统和方 法。通常,无线网络包括使用毫米波(mm波)光谱的发射。例如,mm波 光谱可用于第五代(5g)和/或长期演进(lte)网络,用于从基站(例 如,下一代节点(gnb))或向和从客户端设备(例如,贯穿本说明书描 述的移动设备)的mm波频率范围(例如,频率范围2(fr2)、频率范围 3(fr3)等)发射。通常,fr2发射介于24.25ghz至52.6ghz之间。通 常,mm波高带宽(例如,约400mhz)发射具有相对高的传播损耗。例 如,mm波发射相对于低于6ghz的频带可能具有20db的损耗,诸如用于 频率范围1(fr1)发射的频带。
7.为了克服这种损耗,本文描述的支持mm波的设备被配置用于基于支 持mm波的设备的一个或多个传感器的传感器反馈进行波束成形、波束管 理和天线选择。波束成形使设备能够将射频(rf)能量转向特定方向。发 射设备通过改变相控阵列天线的一个或多个元件的幅值和/或相位来形成波 束。通常,发射设备基于阵列的每个天线的预定义相位-幅值组合来生成波 束,以确保在相对于相控阵列天线的期望方向上发射相对高功率的窄波 束。波束管理使得设备能够识别用于在上行链路和下行链路方向中的每一 个方向上发射的波束。天线选择使得支持mm波的设备(例如,用户装备 (ue))能够通过改善给定上行链路或下行链路发射的无线覆盖范围来确 保高速连接。用于传感器辅助天线和波束选择的系统和方法被配置为使用 来自支持mm波的设备上的传感器的反馈来优化波束成形、波束管
理和天 线选择,并且从而减轻传播损耗、提高关于时间和/或资源的波束确定的效 率,并提高链路性能。
8.支持mm波的设备上的传感器被配置为提供指示设备如何在环境中移 动的数据。来自传感器的运动数据使得设备能够基于指示强信号的先前数 据来估计用于最佳连接的波束成形参数和天线选择。这允许设备估计用于 确定天线选择的最佳参数,而无需对可能的波束和天线进行全扫描来测试 波束和天线的各种组合以获得最佳性能。因此,设备能够以快速方式确定 相对高性能连接的可能候选者,而无需对波束和天线组合执行扫描的带宽 开销。
9.本文档中描述的系统和方法能够实现以下优势中的一项或多项。系统 和方法被配置为以相对低的扫描开销立即(或几乎立即)为ue识别最佳波 束和天线面板。通常,波束和天线选择算法被配置为在运行时识别最佳波 束和天线面板设置。然而,波束选择和天线选择可能会导致相对高的扫描 发射开销。例如,mm波设备可能配备有多个天线面板(例如,三个或更多 个)。每个天线支持数十个波束。因此,对于每个天线面板扫描每个可用 波束可能需要数十毫秒,这给网络增加了过高的开销。这对于具有1毫秒 至2毫秒延迟要求的增强现实/虚拟现实(ar/vr)应用程序来说尤其令人 望而却步。频繁的波束和天线扫描对于无线设备来说并非最佳实用的。用 于传感器辅助天线和波束选择的方法和系统使得能够使用降低的扫描频率 来选择波束和天线,从而减少网络开销(从而减少通信延迟)。
10.用于传感器辅助天线和波束选择的方法和系统使得ue或其他类似设 备能够克服ue的环境变化并且允许增加ue的移动性(这可以表示ue的 环境中的变化)。例如,使用mm波通信的设备可以响应于设备环境(例 如,移动汽车或树木)中的物理变化或设备的移动而频繁地调整波束和天 线选择。环境中的变化可能会导致ue的通信路径中的阻塞或与ue通信的 远程设备(例如,节点)的位置的变化。这可能会使ue和/或节点频繁地 调整其波束以实现通信链路的更好性能。用于传感器辅助天线和波束选择 的方法和系统使得环境中的mm波设备能够快速(例如,立即或几乎立 即)确定最佳波束选择和/或天线选择(当适用时),以响应于这些环境变 化和/或通信设备中的一者或两者的移动而改善通信链路的性能。
11.先前描述的一个或多个优势可以由一个或多个实施方案来实现。
12.在一般方面,一种方法包括从耦接到无线设备的一个或多个运动传感 器获得运动数据,这些运动数据指示无线设备的位置或取向的变化。该方 法包括基于这些运动数据确定无线设备相对于远程设备的位姿。该方法包 括针对无线设备相对于远程设备的多个位姿中的每个位姿基于与以下相关 联的覆盖范围(coverage map)来选择用于与远程设备通信的特定天线或特 定波束:用于与远程设备通信的天线;用于与远程设备通信的波束;或者 用于与远程设备通信的天线和波束配置两者。该方法包括通过特定天线或 特定波束向远程设备发射数据或从远程设备接收数据。
13.在一个实施方案中,该方法包括使用到达角(aoa)数据确定无线设 备相对于远程设备的初始位姿,其中无线设备相对于远程设备的位姿基于 指示无线设备从初始位姿的位置或取向的变化的运动数据。
14.在一个实施方案中,运动数据指示无线设备在一段时间内的位置或取 向的变化。该方法包括:确定无线设备与远程设备之间的通信信道的一个 或多个度量未能满足一个
或多个相应阈值;响应于该确定,识别来自远程 设备的最强信号的到达角(aoa)值;以及从覆盖范围中识别与该覆盖范 围中的aoa值相关联的特定波束和特定天线。
15.在一个实施方案中,该一个或多个度量包括从远程设备接收到的信号 的信噪比(snr)、信号的延迟扩展值和信号的aoa的变化量值中的至少 一者。
16.在一个实施方案中,覆盖范围指示特定天线和特定波束表示用于使得 向远程设备发射数据或从远程设备接收附加数据的最高增益。
17.在一个实施方案中,该一个或多个运动传感器包括至少加速度计、陀 螺仪或加速度计和陀螺仪两者。
18.在一个实施方案中,无线设备和远程设备被配置用于使用频率范围2 (fr2)的mm波通信。
19.在一个实施方案中,选择用于与远程设备通信的特定天线和特定波束 以小于2毫秒的延迟执行。
20.在一个实施方案中,该方法包括周期性地检索运动数据以确定无线设 备是在移动还是静止。
21.在一个实施方案中,无线设备包括至少三个天线阵列,并且其中每个 天线阵列包括至少10个波束配置。
22.在一个实施方案中,基于运动数据确定无线设备相对于远程设备的位 姿包括确定无线设备的平移运动或旋转运动中的一者或多者超过运动阈 值;以及响应于确定超过运动阈值,访问覆盖范围。
23.在一个实施方案中,该方法包括将无线设备的位置或取向的变化与阈 值变化值进行比较;并且响应于该比较,在变化超过阈值时访问覆盖范 围。
24.在一个实施方案中,该方法包括检测从远程设备接收到的信号强度低 于阈值信号强度;以及响应于该检测,获得活动数据。
25.在一个实施方案中,该方法包括基于覆盖范围选择用于与远程设备通 信的特定天线和/或特定波束;以及使得通过特定天线和特定波束向远程设 备发射数据或从远程设备接收数据。
26.在一般方面,一种无线设备包括:至少一个运动传感器;一个或多个 天线阵列,每个天线阵列被配置用于至少两个波束配置;一个或多个处理 器;以及存储指令的非暂态计算机可读存储介质,这些指令当由该一个或 多个处理器执行时使得该一个或多个处理器执行操作。在一个实施方案 中,这些操作包括从该至少一个运动传感器获得运动数据,这些运动数据 指示无线设备的位置或取向的变化。在一个实施方案中,这些操作包括基 于这些运动数据确定无线设备相对于远程设备的位姿。在一个实施方案 中,这些操作包括针对无线设备相对于远程设备的多个位姿中的每个位姿 基于与以下相关联的覆盖范围来选择用于与远程设备通信的特定天线和特 定波束:用于与远程设备通信的该一个或多个天线阵列中的天线阵列;用 于与远程设备通信的波束;或者用于与远程设备通信的天线和波束两者。 在一个实施方案中,这些操作包括通过特定天线和特定波束向远程设备发 射数据。
27.在一个实施方案中,这些操作包括使用到达角(aoa)数据确定无线 设备相对于远程设备的初始位姿,其中无线设备相对于远程设备的位姿基 于指示无线设备从初始位姿
的位置或取向的变化的运动数据。
28.在一个实施方案中,运动数据指示无线设备的位置或取向在一段时间 内没有变化,并且这些操作还包括:确定无线设备与远程设备之间的通信 信道的一个或多个度量未能满足一个或多个相应阈值;响应于该确定,识 别来自远程设备的最强信号的到达角(aoa)值;以及从覆盖范围中识别 与该覆盖范围中的aoa值相关联的特定波束和特定天线。
29.在一个实施方案中,该一个或多个度量包括来自远程设备的信号的信 噪比(snr)、信号的延迟扩展值和信号的aoa的变化量值中的至少一 者。
30.在一个实施方案中,覆盖范围指示特定天线和特定波束表示用于使得 向远程设备发射数据或从远程设备接收附加数据的最高增益。
31.在一个实施方案中,该一个或多个运动传感器包括至少加速度计、陀 螺仪或加速度计和陀螺仪两者。
32.在一个实施方案中,无线设备和远程设备被配置用于使用频率范围2 (fr2)的mm波通信。
33.在一个实施方案中,这些操作包括将无线设备的位置或取向的变化与 阈值变化值进行比较;响应于该比较,在变化超过阈值时访问覆盖范围。
34.在一个实施方案中,这些操作包括检测从远程设备接收到的信号强度 低于阈值信号强度;以及响应于该检测,获得活动数据。
35.在一个实施方案中,这些操作包括基于覆盖范围选择用于与远程设备 通信的特定天线和/或特定波束;以及使得通过特定天线和特定波束向远程 设备发射数据或从远程设备接收数据。
36.在下面的附图和描述中阐述了一个或多个具体实施的细节。这里描述 的技术可以由一个或多个无线通信系统、无线通信系统的部件(例如,站 点、接入点、用户装备、基站等)或其他系统、设备、方法或非暂态计算 机可读介质等来实现。其他特征和优点将在具体实施方式和附图以及权利 要求中显而易见。
附图说明
37.图1示出了根据本文各种实施方案的示例性无线通信系统。
38.图2示出了根据本公开的一些具体实施的被配置用于传感器辅助天线 和波束选择的平台或设备的示例。
39.图3示出了根据本公开的一些具体实施的被配置用于基于多用户触发 的无线通信的示例性设备。
40.图4a至图4c示出了根据本公开的一些具体实施的用于选择天线和波 束中的一者或多者的覆盖范围的示例。
41.图5示出了根据本公开的一些具体实施的基于传感器反馈选择天线和 波束中的一者或多者的示例。
42.图6示出了根据本公开的一些具体实施的基于传感器反馈选择天线和 波束中的一者或多者的示例。
43.图7示出了根据本公开的一些具体实施的用于基于传感器反馈来配置 波束选择、波束或两者的参数的示例性方法。
44.各个附图中的类似参考符号指示类似的元素。
具体实施方式
45.这里描述的技术使得无线设备能够响应于通信链路的信道的变化而执 行波束选择、天线选择或波束和天线选择两者。一种设备包括向设备提供 运动数据的一个或多个传感器。该设备被配置为执行波束成形、选择用于 发射的天线,或执行波束成形并选择用于响应于接收到运动数据而发射的 天线两者。这使得设备能够执行波束成形和天线选择,以使用比对设备天 线执行波束全扫描更少的带宽开销和更少的延迟来提高通信性能。
46.通常,执行波束和天线选择以改善mm波系统的上下文中的通信带宽 (例如,使用fr2频率、fr3频率或其他mm波频率)。mm波通信链路 相对于fr1链路的损耗在长距离(例如,超过数十米或数百米)上具有相 对高的传播损耗。为了减轻传播损耗并改善通信链路的性能,支持mm波 的设备被配置用于基于支持mm波的设备的一个或多个传感器的传感器反 馈进行波束成形、波束管理和天线选择。
47.波束成形使设备能够将射频(rf)能量转向特定方向。发射设备通过 改变相控阵列天线的一个或多个元件的幅值和/或相位来形成波束。通常, 发射设备基于阵列的每个天线的预定义相位-幅值组合来生成波束,以确保 在相对于相控阵列天线的期望方向上发射相对高功率的窄波束。
48.波束管理使得设备能够识别用于在上行链路和下行链路方向中的每一 个方向上发射的波束。在一个示例中,对于5g nr mm波发射,节点(例 如,gnb)周期性地(例如,在5毫秒至160毫秒(监测系统)周期之间) 发射同步信号以识别最佳发射波束和最佳接收波束。这包括使用多个波束 的初始波束训练步骤。在此第一步骤中,使用较宽的波束宽度覆盖宽扫描 范围。第二步骤包括波束细化步骤。在该步骤中,ue在比第一步骤中更窄 的范围内扫描较窄的波束。这使得ue能够在期望的波束方向上进行调整。 在第三步骤中,设备被配置用于波束细化。在波束细化步骤中,用户装备 (ue)对波束的接收角度进行调谐,并且节点使用固定波束发射。ue测 量不同信号强度,直到发现波束的最佳配置。在一个示例中,对于 802.11ad/ay mm波发射,接入点(ap)和无线设备(例如,ue)在扇区级 扫描(sls)和波束细化过程(brp)期间训练其相应波束,如802.11标 准中所定义。
49.天线选择使得设备(例如,ue)能够通过改善给定上行链路或下行链 路发射的无线覆盖范围来确保高速连接。在一个示例中,第一天线的阻塞 或天线未对准都会导致相对于理想发射环境的吞吐量水平降低。在这种情 况下,ue被配置为从多个相控天线阵列(也称为天线面板)中选择。
50.支持mm波的设备包括被配置为提供运动数据的一个或多个传感器。 运动数据指示设备如何在环境中移动。来自传感器的运动数据使得设备能 够基于指示强信号的先前数据来估计用于最佳连接的波束成形参数和天线 选择。这允许设备估计用于对天线选择进行波束成形的最佳参数,而无需 对可能的波束和天线进行全面扫描来测试波束和天线的各种组合以获得最 佳性能。因此,设备能够以快速方式确定相对高性能连接的可能候选者, 而无需对波束和天线组合执行扫描的带宽开销。例如,如果支持mm波的 设备(例如,ue)被转动180度,则系统可以估计波束成形的方向可以与 确定最佳发射性能的先前方向成180度。随后相对于附图描述了此方法的 附加示例。所述的系统和方法均与任何mm波技
术(例如,802.11ad/ay、 5g等)兼容。该系统是轻量级的,并且被配置为独立于任何天线或波束扫 描来选择波束、天线或两者。
51.图1示出了示例性无线通信系统100。为了方便而非限制的目的,在 由第三代合作伙伴项目(3gpp)技术规范定义的lte和5g nr通信标准 的上下文中描述示例性系统100。更具体地讲,无线通信系统100在结合 lte和nr两者的非独立(nsa)网络例如e-utra(演进通用陆地无线电 接入)-nr双连接(en-dc)网络和ne-dc网络的上下文中进行描述。然 而,无线通信系统100也可以是仅结合nr的独立(sa)网络。此外,其 他类型的通信标准也是可能的,包括未来的3gpp系统(例如,第六代 (6g))系统、ieee 802.16协议(例如,wman、wimax等)等。
52.系统100包括ue 101a和ue 101b(统称为“ue 101”)。在此示例 中,ue 101示出为智能电话(例如,可连接到一个或多个蜂窝网络的手持 式触摸屏移动计算设备)。在其他示例中,多个ue 101中的任一者可包括 其他移动计算设备或非移动计算设备,诸如消费电子设备、蜂窝电话、智 能电话、功能手机、平板电脑、可穿戴计算机设备、个人数字助理 (pda)、寻呼机、无线手持设备、台式计算机、膝上型计算机、车载信 息娱乐(ivi)、车载娱乐(ice)设备、仪表板(ic)、平视显示器 (hud)设备、板载诊断(obd)设备、车载移动装备(dme)、移动数 据终端(mdt)、电子引擎管理系统(eems)、电子/引擎控制单元 (ecu)、电子/引擎控制模块(ecm)、嵌入式系统、微控制器、控制模 块、引擎管理系统(ems)、联网或“智能”家电、机器类型通信 (mtc)设备、机器对机器(m2m)设备、物联网(iot)设备或它们的 组合等。
53.在一些示例中,多个ue 101中的任一者可以是iot ue,这种ue可包 括被设计用于利用短期ue连接的低功率iot应用的网络接入层。iot ue 可利用诸如m2m或mtc的技术以利用例如公共陆地移动网络 (plmn)、近距离服务(prose)、设备到设备(d2d)通信、传感器网 络、iot网络、或其组合等等与mtc服务器或设备交换数据。m2m或 mtc数据交换可以是机器启动的数据交换。iot网络描述了互连的iotue,这些ue可包括具有短暂连接的唯一可识别的嵌入式计算设备(在互 联网基础设施内)。iot ue可执行后台应用程序(例如,保持活动消息或 状态更新)以促进iot网络的连接。
54.ue 101被配置为与接入网络(an)或无线电接入网络(ran)110连 接(例如,通信地耦接)。在一些示例中,ran 110可以是下一代ran (ng ran)、演进umts陆地无线电接入网络(e-utran)或传统 ran,诸如umts陆地无线电接入网络(utran)或gsm edge无线电 接入网络(geran)。如本文所用,术语“ng ran”可以是指在5g nr 系统100中操作的ran 110,而术语“e-utran”可以是指在lte或4g 系统100中操作的ran 110。
55.为了连接到ran 110,多个ue 101分别利用连接(或信道)103和 104,每个连接(或信道)可包括物理通信接口或层,如下所述。在该示例 中,连接103和连接104被示为空中接口以实现通信耦接,并且可以与蜂 窝通信协议保持一致,诸如全球移动通信系统(gsm)协议、码分多址 (cdma)网络协议、一键通(ptt)协议、蜂窝ptt(poc)协议、通用 移动电信系统(umts)协议、3gpp lte协议、5g nr协议、或它们的组 合,以及其他通信协议。在一些示例中,多个ue 101可使用接口105诸如 prose接口直接交换通信数据。接口105可另选地被称为侧链路接口105并 且可包括一个或多个逻辑信道,诸如物理侧链路控制信道(pscch)、物 理侧链路共享信道(pssch)、物理侧链路下行链路信道(psdch)或物 理侧链路广播信道
(psbch)或它们的组合等。
56.示出ue 101b被配置为使用连接107访问接入点(ap)106(也称为
ꢀ“
wlan节点106”、“wlan 106”、“wlan终止106”、“wt106”等)。连接107可包括本地无线连接,诸如与任何ieee 802.11协议 一致的连接,其中ap 106将包括无线保真路由器。在该示例 中,示出ap 106连接到互联网而没有连接到无线系统的核心网,如下文进 一步详细描述。在各种示例中,ue 101b、ran 110和ap 106可被配置为 使用lte-wlan聚合(lwa)操作或与ipsec隧道(lwip)集成的 ltw/wlan无线电级别操作。lwa操作可涉及由ran节点111a、111b 将处于rrc_connected状态的ue 101b配置为利用lte和wlan的无 线电资源。lwip操作可涉及ue 101b使用ipsec协议隧道来使用wlan无 线电资源(例如,连接107)来认证和加密通过连接107发送的分组(例 如,ip分组)。ipsec隧道传送可包括封装整个原始ip分组并添加新的分组 头,从而保护ip分组的原始头。
57.ran 110包括启用连接103和104的一个或多个an节点或ran节点 111a和111b(统称为“ran节点111”)。如本文所用,术语“接入节 点”、“接入点”等可描述为网络与一个或多个用户之间的数据或语音连 接或两者提供无线电基带功能的装备。这些接入节点可被称为基站 (bs)、gnodeb、gnb、enodeb、enb、nodeb、ran节点、道路侧单元 (rsu)、发射接收点(trxp或trp)等,并且可包括地面站(例如,陆 地接入点)或在地理区域(例如,小区)内提供覆盖的卫星站等。如本文 所用,术语“ng ran节点”等可以指在5g nr系统100中操作的ran 节点111(例如gnb),而术语“e-utran节点”可以指在lte或4g系 统100中操作的ran节点111(例如enb)。在一些示例中,多个ran 节点111可被实现为专用物理设备诸如宏小区基站或用于提供与宏小区相 比具有较小覆盖区域、较小用户容量或较高带宽的毫微微小区、微微小区 或其他类似小区的低功率(lp)基站中的一者或多者。
58.在一些示例中,多个ran节点111的一些或全部可被实现为在服务器 计算机上运行的一个或多个软件实体,作为可被称为云ran(cran)或 虚拟基带单元池(vbbup)的虚拟网络的一部分。cran或vbbup可实现 ran功能划分,诸如分组数据汇聚协议(pdcp)划分,其中无线电资源 控制(rrc)和pdcp层由cran/vbbup操作,并且其他层2(例如,数 据链路层)协议实体由各个ran节点111操作;介质访问控制(mac)/ 物理层(phy)划分,其中rrc、pdcp、mac、和无线电链路控制 (rlc)层由cran/vbbup操作,并且phy层由各个ran节点111操 作;或“下部phy”划分,其中rrc、pdcp、rlc、和mac层以及 phy层的上部部分由cran/vbbup操作,并且phy层的下部部分由各个 ran节点111操作。该虚拟化框架允许ran节点111的空闲处理器核心执 行例如其他虚拟化应用程序。在一些示例中,单独的ran节点111可表示 使用各个f1接口(图1未示出)来连接到gnb中心单元(cu)的各个 gnb分布式单元(du)。在一些示例中,gnb-du可包括一个或多个远程 无线电头端或rfem(参见例如,图2),并且gnb-cu可由位于ran 110中的服务器(未示出)或由服务器池以与cran/vbbup类似的方式操 作。除此之外或另选地,ran节点111中的一个或多个ran节点可以是 下一代enb(ng-enb),包括向ue 101提供e-utra用户平面和控制平 面协议终端并且利用下一代接口连接到5g核心网(例如,核心网120)的 ran节点。
59.在车辆到一切(v2x)场景中,ran节点111中的一个或多个ran 节点可以是rsu或充当rsu。术语“路侧单元”或“rsu”是指用于v2x 通信的任何交通基础设施实体。rsu可在合适的ran节点或静止(或相对 静止)的ue中实现或由其实现,其中在ue中实现或由其实现的
rsu可 被称为“ue型rsu”,在enb中实现或由其实现的rsu可被称为“enb 型rsu”,在gnb中实现或由其实现的rsu可被称为“gnb型rsu”等 等。在一些示例中,rsu是与位于道路侧上的射频电路耦接的计算设备, 该计算设备向通过的车辆ue 101(vue 101)提供连接性支持。rsu还可 包括内部数据存储电路,用于存储交叉路口地图几何形状、交通统计、媒 体,以及用于感测和控制正在进行的车辆和行人交通的应用程序或其他软 件。rsu可在5.9ghz直接近程通信(dsrc)频带上操作以提供高速事件 所需的极低延迟通信,诸如防撞、交通警告等。除此之外或另选地,rsu 可在蜂窝v2x频带上操作以提供前述低延迟通信以及其他蜂窝通信服务。 除此之外或另选地,rsu可作为wi-fi热点(2.4ghz频带)操作或提供与 一个或多个蜂窝网络的连接以提供上行链路和下行链路通信,或者两者。 计算设备和rsu的射频电路中的一些或全部可封装在适用于户外安装的耐 候性封装件中,并且可包括网络接口控制器以提供与交通信号控制器或回 程网络或两者的有线连接(例如,以太网)。
60.ran节点111中的任一个节点都可作为空中接口协议的终点,并且可 以是ue 101的第一联系点。在一些示例中,多个ran节点111中的任一 者都可执行ran 110的各种逻辑功能,包括但不限于无线电网络控制器 (rnc)的功能,诸如无线电承载管理、上行链路和下行链路动态无线电 资源管理和数据分组调度以及移动性管理。
61.在一些示例中,多个ue 101可被配置为根据各种通信技术,使用正交 频分复用(ofdm)通信信号在多载波通信信道上彼此或者与多个ran节 点111中的任一者进行通信,所述通信技术诸如但不限于ofdma通信技 术(例如,用于下行链路通信)或sc-fdma通信技术(例如,用于上行 链路和prose或侧链路通信),尽管本文所述技术的范围在这方面不受限 制。ofdm信号可包括多个正交子载波。
62.在一些示例中,下行链路资源网格可用于从多个ran节点111中的任 一者到多个ue 101的下行链路传输,而上行链路传输可利用类似的技术。 网格可以是时频网格,称为资源网格或时频资源网格,其是每个时隙中下 行链路中的物理资源。对于ofdm系统,此类时频平面表示是常见的做 法,这使得无线资源分配变得直观。资源网格的每一列和每一行分别对应 一个ofdm符号和一个ofdm子载波。时域中资源网格的持续时间与无线 电帧中的一个时隙对应。资源网格中最小的时频单位表示为资源元素。每 个资源网格包括多个资源块,这些资源块描述了某些物理信道到资源元素 的映射。每个资源块包括资源元素的集合;在频域中,这可以表示当前可 以分配的最少量资源。使用此类资源块来传送几个不同的物理下行链路信 道。
63.在一些示例中,多个ue 101和多个ran节点111通过许可介质(也 称为“许可频谱”或“许可频带”)和未许可共享介质(也称为“未许可 频谱”和/或“未许可频带”)来传送(例如,发射和接收)数据。许可频 谱可包括在大约400mhz至大约3.8ghz的频率范围内操作的信道,而未许 可频谱可包括5ghz频带。未许可频谱中的nr可被称为nr-u,并且未许 可频谱中的lte可被称为lte-u、许可辅助接入(laa)或multefire。
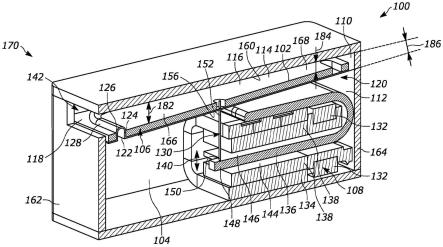
64.图2示出了平台300(或“设备300”)的示例。在一些示例中,计算 机平台300可适于用作ue 101或本文所讨论的任何其他部件或设备。平台 300可包括示例中所示的部件的任何组合。平台300的部件(或其部分)可 被实现为集成电路(ic)、分立电子设备或适配在计算机平台300中的其 他模块、逻辑、硬件、软件、固件或它们的组合,或者被实现为以其他方 式结合在较大系统的底盘内的部件。图2的框图旨在示出平台300的部件 的高级视图。然
而,在一些示例中,平台300可包括更少的、附加的或另 选的部件,或者包括图2所示的部件的不同布置。
65.数据处理设备302包括电路,诸如但不限于一个或多个处理器(或处 理器核心)、高速缓存存储器,以及一个或多个ldo、中断控制器、串行 接口(诸如spi)、i2c或通用可编程串行接口模块、rtc、定时-计数器 (包括间隔定时器和看门狗定时器)、通用i/o、存储卡控制器(诸如sdmmc或类似控制器)、usb接口、mipi接口和jtag测试接入端口中的 一者或多者。数据处理设备302的处理器(或核心)可与存储器/存储元件 耦接或可包括存储器/存储元件,并且可被配置为执行存储在存储器或存储 装置中的指令,以使各种应用程序或操作系统能够在系统300上运行。在 一些示例中,存储器或存储元件可以为片上存储器电路,该存储器电路可 包括任何合适的易失性或非易失性存储器,诸如dram、sram、 eprom、eeprom、闪存存储器、固态存储器或它们的组合等。
66.数据处理设备302的处理器可包括例如一个或多个处理器内核、一个 或多个应用处理器、一个或多个gpu、一个或多个risc处理器、一个或 多个arm处理器、一个或多个cisc处理器、一个或多个dsp、一个或多 个fpga、一个或多个pld、一个或多个asic、一个或多个微处理器或控 制器、多线程处理器、超低电压处理器、嵌入式处理器、一些其他已知的 处理元件,或它们的任何合适组合。在一些示例中,数据处理设备302可 包括或可以为用于执行根据本文所述的技术的专用处理器/控制器。
67.作为示例,数据处理设备302的处理器可包括apple a系列处理器。 数据处理设备302的处理器还可以是以下中的一者或多者:基于 architecture core
tm
的处理器,诸如quark
tm
、atom
tm
、i3、i5、i7或mcu级 处理器,或可购自加利福尼亚州圣克拉拉市公司(corporation, santa clara,ca)的另一此类处理器;advanced micro devices(amd)处理器或加速处理单元(apu);来自technologies,inc. 的snapdragon
tm
处理器、texas instruments,open multimediaapplications platform(omap)
tm
处理器;来自mips technologies,inc.的基 于mips的设计,诸如mips warrior m级、warrior i级和warrior p级处理 器;获得arm holdings,ltd.许可的基于arm的设计,诸如arm cortex
‑ꢀ
a、cortex-r和cortex-m系列处理器;等。在一些具体实施中,数据处理 设备302可以是片上系统(soc)的一部分,其中数据处理设备302和其他 部件形成为单个集成电路。
68.附加地或另选地,数据处理设备302可包括电路,诸如但不限于一个 或多个现场可编程设备(fpd)诸如fpga;可编程逻辑设备(pld),诸如 复杂pld(cpld)、大容量pld(hcpld);asic,诸如结构化asic;可编 程soc(psoc),或它们的组合等等。在一些示例中,数据处理设备302 可包括逻辑块或逻辑构架,以及可被编程用于执行各种功能诸如本文所述 的过程、方法、功能的其他互连资源。在一些示例中,数据处理设备302 可包括用于存储逻辑块、逻辑构架、数据或查找表(lut)中的其他数据 等的存储器单元(例如,可擦可编程只读存储器(eprom)、电可擦除可 编程只读存储器(eeprom)、闪存存储器、静态存储器(例如,静态随 机存取存储器(sram)或防熔丝))。
69.基带电路310310可被实现为例如焊入式衬底,其包括一个或多个集成 电路、焊接到主电路板的单个封装集成电路或包含两个或多个集成电路的 多芯片模块。
70.天线波束面板312(也称为无线电前端模块(rfem))可包括毫米波 (mm波)rfem和一个或多个子mm波射频集成电路(rfic)。在一些 示例中,该一个或多个子mm波rfic可以与mm波天线波束面板312物理 分离。这些rfic可包括到一个或多个天线或天线阵列的连接件,并且天线 波束面板312可连接到多个天线。在一些示例中,mm波和子mm波两者的 无线电功能均可在结合了mm波天线和子mm波天线两者的相同物理天线 波束面板312中实现。在一些实施方案中,mm波功能实现了ieee 802.11ad和802.11ay标准。
71.平台300还可包括用于将外部设备与平台300连接的接口电路(未示 出)。使用该接口电路连接到平台300的外部设备包括传感器电路221和 机电式部件(emc)222,以及耦接到可移除存储器电路223的可移除存储 器设备。
72.传感器电路304包括设备、模块或子系统,其目的在于检测其环境中 的事件或变化,并且将关于所检测的事件的信息(例如,传感器数据)发 送到一个或多个其他设备、模块或子系统。此类传感器的示例包括:惯性 测量单元(imu),诸如加速度计、陀螺仪、或磁力仪;包括三轴加速度 计、三轴陀螺仪、或磁力仪的微机电系统(mems)或纳机电系统 (nems);液位传感器;流量传感器;温度传感器(例如,热敏电阻 器);压力传感器;气压传感器;重力仪;测高仪;图像捕获设备(例 如,相机或无透镜孔径);光检测和测距(lidar)传感器;接近传感器 (例如,红外辐射检测器等)、深度传感器、环境光传感器、超声收发 器;麦克风或其他音频捕获设备,或它们的组合等等。
73.系统300包括一个或多个运动传感器304。传感器304被配置为生成运 动数据,这些运动数据表示ue如何在环境中移动(例如,相对于与ue通 信的远程设备)。如先前所述,传感器304可以包括一个或多个加速度 计、一个或多个陀螺仪和/或其他感测元件。相对于图3进一步描述了这些 传感器。当系统300的位姿在系统环境中变化时,传感器304捕获该系统 的运动并将运动数据发送到运动检测模块306。
74.数据处理设备302被配置为承载运动检测模块306和覆盖范围模块 308。运动检测模块306被配置为从传感器304的运动数据中确定设备如何 在环境中移动。运动检测模块306可以相对于针对其选择了最佳波束和天 线的设备的先前位姿来确定设备的新位置和取向(例如,位姿)。可以将 更新的位姿提供给覆盖范围模块308。
75.覆盖范围模块308被配置为基于从运动检测模块306提供的更新的位 姿来选择面板312的波束和天线以用于由系统300发射或接收数据。对波 束和天线的选择包括选定相控天线阵列的特定配置,以从该阵列面板生成 定向波束。在一个示例中,当设备在环境中移动时,数据处理设备302连 续地或几乎连续地执行选择过程。在一些实施方案中,当运动检测模块306 检测到运动时,数据处理设备302利用覆盖范围模块308执行选择过程。 在一些实施方案中,当性能下降到阈值以下时(例如,当检测到阻塞 时),数据处理设备302利用覆盖范围模块308执行选择过程。
76.通常,数据处理设备302被配置为识别使用中天线和波束表现不佳 (例如,低于性能阈值)。例如,信号强度、带宽或其他链路度量(例 如,从基带模块310的基带反馈中检索)与阈值相关联。当度量的值未能 满足阈值时,数据处理设备302被配置为识别和选择用于发射和接收两者 的不同的最佳天线和波束,而无需扫描开销(例如,无需扫描一些或全部 可用天线面板和波束)。在一些实施方案中,数据处理设备302被配置为 确定当前天线或波束(或两者)在未来将表现不佳(例如,在数十毫秒 内)。数据处理设备302被配置为预测这
种性能下降并切换到预期不会发 生类似性能下降的天线、波束或两者。
77.系统300从传感器304和基带模块310中的每一者接收输入。基带 (bb)反馈可包括信噪比(snr)、延迟扩展、到达角(aoa)和类似链 路度量。数据处理设备302使用能够从无线基带模块310获得的反馈数据 来推断无线主导路径的取向。无线主导路径包括信号从发射器到接收器的 路径。数据处理设备302使用基带模块310反馈数据来识别使用中天线面 板、波束或两者是否最佳。通常,如果aoa数据对系统300不可用,则由 数据处理设备302估计aoa。
78.简而言之,转向图3,设备400和410示出了由图2的传感器304收集 的数据的示例。例如,设备400包括陀螺仪402a、402b和402c。陀螺仪 402被配置为测量设备400围绕空间轴线旋转的速率,包括设备400的旋转 俯仰、翻滚和偏航、移动(例如,以度或弧度)。类似地,设备410的加 速度计412a、412b和412c被配置为测量设备410沿着x、y和z轴的速度 变化(例如,平移运动)。设备400和410能够组合成包括陀螺仪402a-c 和加速度计412a-c两者的单个设备。
79.返回图2,运动检测模块306接收加速度计运动数据并且识别沿着x、 y和z轴中的每一者的平移移动(例如,以厘米为单位)。运动检测模块 306接收陀螺仪运动数据并确定设备围绕x、y和z轴中的每一者的旋转。 结果是系统300相对于系统的先前位姿的更新的位姿。相对于通过通信链 路连接的远程设备确定系统的初始位姿。可以基于aoa数据(例如,来自 bb面板310)确定初始位姿。在一些具体实施中,如果aoa数据不可用, 则执行一次性波束扫描以确定aoa,如随后所述。运动检测模块306将运 动数据发送到被配置用于天线选择、波束选择或两者的覆盖范围模块308。 覆盖范围模块308确定位姿的变化是否足够显着以使波束或天线面板切换 发生。
80.覆盖范围模块308基于来自bb面板310的数据和由运动检测模块306 提供的更新的位姿来执行对天线、波束或两者的选择。因为针对给定设备 (例如,系统300的设备)预定义波束辐射图案和天线位置,所以覆盖范 围模块308包括覆盖范围数据。覆盖范围数据包括每个可用设备取向和位 置的最高增益天线面板和波束标识。
81.覆盖范围模块308通常基于两个场景选择新的天线或波束。第一种场 景是阻塞场景,其中在系统300与远程设备之间发生非视线(nlos)。第 二种场景是移动性场景,其中移动设备移动(例如,系统或远程设备的移 动)引起天线或波束未对准或天线和波束两者未对准。
82.在阻塞场景中,覆盖范围模块308检测连接不稳定。这可能在一个或 多个通信度量(例如,通过基带反馈面板310测量)未能满足阈值时发 生。通常,无线信道在los环境中比在阻塞/nlos环境中更稳定。当信道 稳定性低时,可能存在nlos设置或场景,并且波束或天线切换(或两 者)可能会改善信道稳定性。数据处理设备302使用以下度量确定信道稳 定性。数据处理设备302通过测量snr下降并使用与snr相关联的标准偏 差值将该下降上下文化来确定信道稳定性低。阻塞通常导致显著的初始 snr下降和随后的高snr偏差。数据处理设备302通过测量信号的延迟扩 展来确定信道稳定性低。与los设置相比,nlos/阻塞设置中的延迟扩展 通常更高。数据处理设备302通过测量aoa变化来确定信道稳定性低。当 两个设备之间的无线los路径被阻塞时,无线主导路径的aoa通常会发生 变化。在一个示例中,波束的最强路径可以变成反射路径而不是到远程设 备的直接路径,如随后相对于图6
所述。
83.在一些实施方案中,snr或延迟扩展值可能会增加,并且aoa可能会 由于移动性而不是由于阻塞而发生变化。系统300被配置为通过检查来自 传感器304的运动数据来区分阻塞和移动性场景。当传感器指示系统300 是静态的时,确定为阻塞场景。在一些实施方案中,通过在运行时(例 如,使用机器学习(ml)或类似模型)之前的训练模型来确定snr偏 差、延迟扩展或任何其他信道度量的阈值。例如,可以用包括度量的各种 值的数据训练机器学习模型,以将来自远程设备的信号分类为针对值的各 种组合中的每个组合被阻塞或未阻塞。机器学习模型可用于确定该一个或 多个度量中的每一者的适当阈值,以确保被阻塞或未阻塞的信号的表征代 表正确的场景。
84.在移动场景中,覆盖范围模块308被配置为基于由运动检测模块306 提供的更新的位姿来确定系统300的新天线或波束(或两者)。根据系统 300相对于远程设备的已知位姿来确定位姿的变化。可以通过使用bb反馈 数据(诸如信号的aoa)来确定(例如,一次)已知位姿。通常,这可以 基于天线阵列中存在最高接收功率的位置来确定。例如,可以提供与最高 功率相关联的或θ角的值。通常,系统将所确定的aoa与远程发射器的 峰值波束相关联。换句话说,估计的最强瓣位于所确定的aoa的位置处。 根据运动数据和aoa,确定更新的位姿并选择覆盖范围中的新位置,如随 后所述。基于覆盖范围中的位置,选择面板312的特定天线和波束以用于 在与远程设备的通信链路中发射和/或接收数据。
85.如先前所述,系统300使用基带反馈来识别到远程设备的主导/最强无 线路径的当前取向。当无线路径的方向保持相同并且设备移动时,数据处 理设备302使用运动数据来识别运动的程度(例如,以度为单位)。数据 处理设备302被配置为参考当前主导信号路径取向和运动以确定新的无线 路径取向和位置(例如,位姿)。数据处理设备302使用覆盖范围来识别 用于更新的位姿的最佳天线阵列面板和波束。在移动性los场景中,主导 路径的取向保持相同,而系统300取向发生变化。数据处理设备302被配 置为获取(或估计)无线主导路径的aoa。使用运动数据,覆盖范 围模块306识别系统300移动了覆盖范围模块306被配置为周期 性地(例如,每10毫秒(ms))获取陀螺仪运动数据(例如,翻滚、俯仰 和偏航)。δ表示当前位姿与先前位姿值之间的差值。当主导路径取向在 这两次迭代中保持相同(典型场景)时,主导路径对应于设备位姿 p'=p δ。当更新的设备位姿p'与使用中天线面板或波束之外的天线面板或 波束对准时,覆盖范围模块306被配置为使系统300使用新的天线面板和 波束312。
86.为了确定相对于远程设备的初始系统300位姿(例如,取向和位 置),数据处理设备302确定或估计来自远程设备的发射的aoa。在一些 具体实施中,aoa由接收基带硬件310提供。在一些具体实施中,数据处 理设备302从信号度量的信道矩阵估计aoa。例如,数据处理设备302将 使用中波束的峰视为表示主导信道路径的取向,并且因此表示波束覆盖范 围中的当前取向。当找到多个峰时,数据处理设备302使用峰的质心来估 计aoa。主导无线路径的方向表示峰波束增益的取向。如前所述,aoa可 由基带模块310提供或从信道矩阵估计,诸如通过使用基于在相控阵列处 观察到的传感器协方差矩阵的本征值分解的高分辨率测向算法(例如,多 信号分类算法)。
87.图4a至图4c示出了根据本公开的一些具体实施的用于选择天线和波 束中的一者
或多者的覆盖范围500a、500b、500c(统称为覆盖范围500) 的示例。通常,图2的覆盖范围模块308被预装有覆盖范围500。覆盖范围500针对信号的每个特定aoa指定特定天线,并且针对该天线指定特定波 束来优化信道。例如,可以在运行时间之前计算覆盖范围500以在不同设 备取向上针对基站的天线识别最佳天线和波束。
88.覆盖范围500被定义为每个位置的一组条目。例如,向量诸如[phi, theta,best_antenna,best_beam]可以表示每个最佳天线和最佳波束的角度。虽 然图4a的覆盖范围500a仅示出了针对角度θ和的最佳天线阵列,但是 一组范围用于每个其他位姿值和每个天线的每个波束。覆盖范围模块308 可以快速(例如,在1ms内)参考范围并且无需扫描系统300的所有可用 波束和天线阵列。在覆盖范围500a中,为了简化说明,省略了每个角度θ 和的最佳波束。在一个示例中,覆盖范围500包括针对运动数据的旋转 和平移运动两者的波束和天线选择。
[0089]
覆盖范围500基于波束辐射图案提供最佳天线面板和波束的识别。数 据处理设备302结合无线多路径环境(例如,无线路径的方位角和仰角方 向)的确定使用该数据来识别哪些波束与无线主导路径最佳地“对准”。 因为在运行时之前对于特定设备(例如,移动设备)的波束辐射方向图和 天线位置是已知的,所以可以预定义覆盖范围以表示相对于远程设备的给 定系统300取向的最高增益天线面板和波束。如先前所述,数据处理设备 302估计或从硬件读取无线主导路径的aoa,并从覆盖范围500识别与该 aoa最佳对准的天线/波束。
[0090]
在图4a中,覆盖范围500a示出了移动设备(例如,系统300)相对 于远程设备(例如,基站)的给定值θ和(俯仰和翻滚)的天线选择。基 于接收到的或估计的aoa数据,发现移动设备的初始取向在覆盖范围中处 于约θ=90,对应于框502。这里,选择(508)天线3作为最佳天 线。类似的覆盖范围(未示出)详细说明了用于该取向的天线3的最佳波 束。
[0091]
转到图4b,覆盖范围500b示出了移动设备(例如,系统300)相对于 远程设备(例如,基站)的给定值θ和(俯仰和翻滚)的天线选择。这 里,系统300已经改变取向,沿着旋转到的值,而θ和其他位置 和取向是静态的。覆盖范围从框502移位到框504。框504指示(508)天 线1是该取向的最佳天线。类似的覆盖范围(未示出)详细说明了用于该 取向的天线1的最佳波束。由于已知在502处的位姿,因此数据处理设备 302不需要估计aoa来选择最佳波束或天线。
[0092]
转到图4c,覆盖范围500c示出了移动设备(例如,系统300)相对于 远程设备(例如,基站)的给定值θ和(俯仰和翻滚)的天线选择。这 里,系统300已经改变取向,沿着θ旋转到θ=180的值,而和其他位置 和取向是静态的。覆盖范围从框504移位到框506。框506指示(508)天 线1或天线3可以是该取向的最佳天线。类似的覆盖范围(未示出)详细 说明了天线1的最佳波束,并且天线3的最佳波束用于该取向。
[0093]
图5示出了根据本公开的一些实施方案的用于由移动设备602基于传 感器反馈来选择天线和波束中的一者或多者的环境600的示例。在图5的 示例性环境600中,移动设备(例如,移动电话)相对于远程设备604(例 如,gnb)处于第一取向610。基于全波束扫描,设备602识别天线2的最 佳波束用于接收信号。移动设备602还确定aoa。当移动设备602翻转 180度时,移动设备602检测来自耦接到移动设备的陀螺仪的运动。尽管位 置是静态的,但
是取向变化了,并且因此移动设备602检测到运动场景而 不是阻塞场景。基于运动数据,移动设备602确定更新的位姿值。移动设 备602使用覆盖范围确定天线1现在是最佳天线,并且从天线1选择用于 与远程设备604的通信链路中的波束。移动设备602在不执行移动设备的 天线和波束的另一扫描的情况下选择新波束和天线。移动设备602以低延 迟(例如,小于1ms)从天线2切换到天线1,并且没有波束扫描的带宽开 销。
[0094]
图6示出了根据本公开的一些实施方案的用于由移动设备702基于传 感器反馈来选择天线和波束中的一者或多者的示例性环境700。在该示例 中,移动设备(例如,ue)702与远程设备708(例如,gnb)通信。移动 设备702是静态的。天线2的第一波束710a初始用于基于波束扫描与远程 设备708通信。尽管没有发生运动,但是移动设备702检测到链路的性能 被降级。例如,可能存在snr下降、延迟扩展增加或aoa的变化,如先前 所述。这可能是阻塞704的结果,诸如在通信期间在移动设备702与远程 设备708之间移动的人员。因此,远程设备708的发射信号的主瓣被阻 塞。响应于检测到通信度量的值的变化,并且响应于还检测到未发生运 动,移动设备702基于发射信号的次瓣找到替代波束710b。次瓣在设备 702的环境中从对象706反射。aoa指示来自不同位置的信号强度最强。移 动设备702将最强信号的aoa与覆盖范围中的位置相关联,并且因此选择 天线2的波束710b。
[0095]
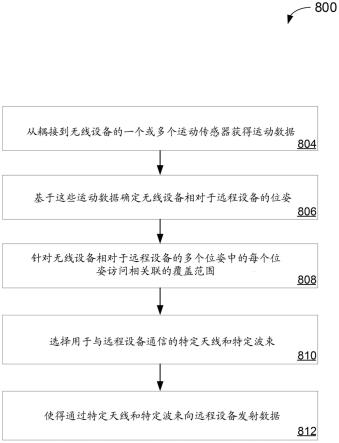
图7示出了根据本公开的一些具体实施的用于基于传感器反馈来配置 波束选择、波束或两者的参数的示例性方法。在一些示例中,图1至图6 的电子设备、网络、系统、芯片或部件、或它们的部分或具体实施可被配 置为执行方法800。方法800包括在无线设备处接收来自远程设备的同步信 号。方法800包括响应于接收到同步信号,获得(804)来自耦接到无线设 备的一个或多个运动传感器的运动数据,这些运动数据指示无线设备的位 置或取向的变化。方法800包括基于运动数据确定(806)无线设备相对于 远程设备的位姿。方法800包括针对无线设备相对于远程设备的多个位姿 中的每个位姿访问(808)与以下相关联的覆盖范围:用于与远程设备通信 的天线;用于与远程设备通信的波束;或者用于与远程设备通信的天线和 波束配置两者。方法800包括选择(810)用于与远程设备通信的特定天线 和/或特定波束。方法800包括使得(812)使得通过特定天线和特定波束向 远程设备发射数据。
[0096]
在一些实施方案中,方法800包括使用到达角(aoa)数据确定无线 设备相对于远程设备的初始位姿。无线设备相对于远程设备的位姿基于指 示无线设备从初始位姿的位置或取向的变化的运动数据。
[0097]
在一些实施方案中,运动数据指示无线设备在一段时间内的位置或取 向的变化。方法800包括确定无线设备与远程设备之间的通信信道的一个 或多个度量未能满足一个或多个相应阈值。方法800包括响应于该确定, 识别来自远程设备的最强信号的到达角(aoa)值。方法800包括从覆盖 范围中识别与该覆盖范围中的aoa值相关联的特定波束和特定天线。
[0098]
在一些实施方案中,该一个或多个度量包括同步信号的信噪比 (snr)、同步信号的延迟扩展值和同步信号的aoa的变化量值中的至少 一者。
[0099]
在一些实施方案中,方法800包括通过将表示该一个或多个度量的值 的训练数据应用于机器学习模型来选择该一个或多个相应阈值。机器学习 模型被配置为将同步信号分类为被阻塞或未阻塞。
[0100]
在一些实施方案中,覆盖范围指示特定天线和特定波束表示用于使得 向远程设备发射数据或从远程设备接收附加数据的最高增益。
[0101]
在一些实施方案中,该一个或多个传感器包括至少加速度计、陀螺仪 或加速度计和陀螺仪两者。
[0102]
在一些实施方案中,无线设备和远程设备被配置用于使用频率范围2 (fr2)的mm波通信。
[0103]
在一些实施方案中,选择用于与远程设备通信的特定天线和特定波束 以小于2毫秒的延迟执行。
[0104]
在一些实施方案中,方法800包括周期性地检索运动数据以确定无线 设备是在移动还是静止。
[0105]
在一些实施方案中,无线设备包括至少三个天线阵列,并且其中每个 天线阵列包括至少10个波束配置。
[0106]
在一些实施方案中,基于运动数据确定无线设备相对于远程设备的位 姿包括确定无线设备的平移运动或旋转运动中的一者或多者超过运动阈 值。方法800包括响应于确定超过运动阈值,访问覆盖范围。
[0107]
众所周知,使用个人可识别信息应遵循公认为满足或超过维护用户隐 私的行业或政府要求的隐私政策和做法。具体地,应管理和处理个人可识 别信息数据,以使无意或未经授权的访问或使用的风险最小化,并应当向 用户明确说明授权使用的性质。
[0108]
本说明书中描述的主题和功能操作的具体实施可在数字电子电路中、 有形体现的计算机软件或固件中、计算机硬件中(包括本说明书中公开的 结构及其结构等同物)或在它们中的一者或多者的组合中实现。所述主题 的软件具体实施可被实现为一个或多个计算机程序。每个计算机程序可包 括编码在有形非暂态计算机可读计算机存储介质上的计算机程序指令的一 个或多个模块,以供数据处理装置执行或控制数据处理装置的操作。另选 地或附加地,程序指令可被编码在人工生成的传播信号中/上。在一个示例 中,信号可为机器生成的电信号、光信号或电磁信号,该电信号、光信号 或电磁信号被生成以对信息进行编码以便传输到合适的接收器装置以供数 据处理装置执行。计算机存储介质可以是机器可读存储设备、机器可读存 储衬底、随机或串行存取存储器设备或计算机存储介质的组合。
[0109]
术语“数据处理装置”、“计算机”和“计算设备”(或如本领域普 通技术人员所理解的等同形式)指数据处理硬件。例如,数据处理装置可 涵盖用于处理数据的各种装置、设备和机器,例如包括可编程处理器、计 算机、或多个处理器或计算机。装置还可包括专用逻辑电路,该专用逻辑 电路包括例如中央处理单元(cpu)、现场可编程门阵列(fpga)或专用 集成电路(asic)。在一些具体实施中,数据处理装置或专用逻辑电路 (或数据处理装置或专用逻辑电路的组合)可基于硬件或软件(或基于硬 件和基于软件的组合)。装置可任选地包括为计算机程序创建执行环境的 代码,例如构成处理器固件、协议栈、数据库管理系统、操作系统、或执 行环境的组合的代码。本公开设想使用具有或不具有常规操作系统(例如 linux、unix、windows、mac os、antrol或ios)的数据处理装 置。
[0110]
也可被称为或描述为程序、软件、软件应用程序、模块、软件模块、 脚本或代码的计算机程序可以任何形式的编程语言编写。编程语言可包括 例如编译语言、解释语言、声
明语言或过程语言。程序可以任何形式部 署,包括作为用于计算环境中的独立程序、模块、部件、子例程或单元。 计算机程序可以但不必与文件系统中的文件对应。程序可存储在保存其他 程序或数据(例如,存储在标记语言文档中的一个或多个脚本)的文件的 一部分中、在专用于所讨论的程序的单个文件中或在多个协调文件中,该 多个协调文件存储一个或多个模块、子程序或代码部分。计算机程序可被 部署为在一个计算机上或在位于例如一个站点或分布于通过通信网络互连 的多个站点的多个计算机上执行。虽然各种附图中所示的程序的部分可被 示出为通过各种对象、方法或过程实现各种特征和功能的单独模块,但程 序可替代地包括多个子模块、第三方服务、部件和库。相反,各种部件的 特征和功能可视情况组合成单个部件。用于进行计算确定的阈值可静态 地、动态地或同时静态地和动态地确定。
[0111]
本说明书所述的方法、过程或逻辑流程可由执行一个或多个计算机程 序的一个或多个可编程计算机执行,以通过对输入数据进行操作并产生输 出来执行功能。这些方法、过程和逻辑流程也可由专用逻辑电路(例如, cpu、fpga或asic)执行,并且装置也可被实现为专用逻辑电路。
[0112]
适用于执行计算机程序的计算机可基于通用微处理器和专用微处理器 以及其他种类的cpu中的一者或多者。计算机的元件是用于执行指令的 cpu和用于存储指令和数据的一个或多个存储器设备。一般来讲,cpu可 从存储器接收指令和数据(并将数据写入存储器)。计算机还可包括或可 操作地耦接到用于存储数据的一个或多个海量存储设备。在一些具体实施 中,计算机可从海量存储设备接收数据并向海量存储设备传输数据,这些 海量存储设备包括例如磁盘、磁光盘或光盘。此外,计算机可嵌入另一个 设备中,例如移动电话、个人数字助理(pda)、移动音频或视频播放 器、游戏机、全球定位系统(gps)接收器或便携式存储装置诸如通用串 行总线(usb)闪存驱动器。
[0113]
适用于存储计算机程序指令和数据的计算机可读介质(暂态或非暂 态,视情况而定)可包括所有形式的永久/非永久和易失性/非易失性存储 器、介质和存储器设备。计算机可读介质可包括例如半导体存储器设备, 诸如随机存取存储器(ram)、只读存储器(rom)、相变存储器 (pram)、静态随机存取存储器(sram)、动态随机存取存储器 (dram)、可擦除可编程只读存储器(eprom)、电可擦除可编程只读 存储器(eeprom)和闪存存储器设备。计算机可读介质还可包括例如磁 性设备,诸如磁带、磁带盒、卡带和内置/可移除磁盘。计算机可读介质还 可包括磁光盘和光学存储器设备以及技术,包括例如数字视频光盘 (dvd)、cd rom、dvd /-r、dvd-ram、dvd-rom、hd-dvd和 bluray。存储器可存储各种对象或数据,包括高速缓存、类、框架、应 用程序、模块、备份数据、作业、网页、网页模板、数据结构、数据库 表、储存库和动态信息。存储在存储器中的对象和数据的类型可包括参 数、变量、算法、指令、规则、约束和参考。另外,存储器可包括日志、 策略、安全性或访问数据以及报告文件。处理器和存储器可由专用逻辑电 路补充,或者被并入专用逻辑电路中。
[0114]
虽然本说明书包含许多特定具体实施细节,但不应将这些细节理解为 是对要求保护的内容的范围的限制,而应将其视作对可能是特定具体实施 特有的特征的描述。本说明书中在不同具体实施的上下文中描述的某些特 征也可以在单个具体实施中组合地实现。相反,在单个具体实施的上下文 中描述的各种特征也可单独地或者以任何合适的子组合的形式在多个具体 实施中实现。此外,虽然先前所述的特征可能被描述为以某些组合来
起作 用并且甚至最初如此来要求保护,但是要求保护的组合中的一个或多个特 征在某些情况下可从该组合去除,并且要求保护的组合可涉及子组合或子 组合的变型。
[0115]
已经描述了主题的特定具体实施。所述具体实施的其他具体实施、更 改和排列均在以下权利要求书的范围内,这对本领域技术人员将是显而易 见的。虽然操作在附图或权利要求书中以特定次序示出,但不应将此理解 为要求以所示的特定次序或相继次序来执行此类操作,或者要求执行所有 所示的操作(一些操作可被认为是可选的),以实现期望的结果。在某些 情况下,多任务处理或并行处理(或多任务处理和并行处理的组合)可能 是有利的,并且视情况而定来执行。
[0116]
此外,先前所述的具体实施中各个系统模块和部件的划分或整合不应 被理解为在所有具体实施中都要求此类划分或整合,并且应当理解,所述 程序部件和系统可一般性地一起整合在单个软件产品中或者封装到多个软 件产品中。
[0117]
因此,先前所述的示例性具体实施不限定或约束本公开。在不脱离本 公开的范围的情况下,其他改变、替换和更改也是可能的。
[0118]
实施例
[0119]
实施例1包括一种方法,所述方法包括:从耦接到无线设备的一个或 多个运动传感器获得运动数据,所述运动数据指示所述无线设备的位置或 取向的变化;基于所述运动数据确定所述无线设备相对于远程设备的位 姿;针对所述无线设备相对于所述远程设备的多个位姿中的每个位姿基于 与以下相关联的覆盖范围来选择用于与所述远程设备通信的特定天线或特 定波束:用于与所述远程设备通信的天线;用于与所述远程设备通信的波 束;或者用于与所述远程设备通信的所述天线和所述波束配置两者;以及 使得通过所述特定天线或所述特定波束向所述远程设备发射数据或从所述 远程设备接收数据。
[0120]
实施例2可包括实施例1并且还包括使用到达角(aoa)数据确定所 述无线设备相对于所述远程设备的初始位姿,其中所述无线设备相对于所 述远程设备的所述位姿基于指示所述无线设备从所述初始位姿的所述位置 或所述取向的变化的所述运动数据。
[0121]
实施例3包括实施例1至2中的任一项,其中所述运动数据指示所述 无线设备的所述位置或所述取向在一段时间内没有变化,并且其中所述方 法还包括:确定所述无线设备与所述远程设备之间的通信信道的一个或多 个度量未能满足一个或多个相应阈值;响应于所述确定,识别来自所述远 程设备的最强信号的到达角(aoa)值;以及从所述覆盖范围识别与所述 覆盖范围中的所述aoa值相关联的所述特定波束和所述特定天线。
[0122]
实施例4可包括实施例1至3中的任一项,其中所述一个或多个度量 包括从所述远程设备接收到的信号的信噪比(snr)、所述信号的延迟扩 展值和所述信号的所述aoa的变化量值中的至少一者。
[0123]
实施例5可包括实施例1至4中的任一项,其中所述覆盖范围指示所 述特定天线和所述特定波束表示用于使得向所述远程设备发射数据或从所 述远程设备接收附加数据的最高增益。
[0124]
实施例6可包括实施例1至5中的任一项,其中所述一个或多个运动 传感器包括至少加速度计、陀螺仪或所述加速度计和所述陀螺仪两者。
[0125]
实施例7可包括实施例1至6中的任一项,其中所述无线设备和所述 远程设备被配置用于使用频率范围2(fr2)的mm波通信。
[0126]
实施例8可包括实施例1至7中的任一项,其中选择用于与所述远程 设备通信的所述特定天线和所述特定波束以小于2毫秒的延迟执行。
[0127]
实施例9可包括实施例1至8中的任一项,还包括周期性地检索运动 数据以确定所述无线设备是在移动还是静止。
[0128]
实施例10可包括实施例1至9中的任一项,其中所述无线设备包括至 少三个天线阵列,并且其中每个天线阵列包括至少10个波束配置。
[0129]
实施例11可包括实施例1至10中的任一项,其中基于所述运动数据 确定所述无线设备相对于所述远程设备的所述位姿包括:确定所述无线设 备的平移运动或旋转运动中的一者或多者超过运动阈值;以及响应于确定 超过所述运动阈值,访问所述覆盖范围。
[0130]
实施例12可包括实施例1至11中的任一项,还包括:将所述无线设 备的所述位置或所述取向的所述变化与阈值变化值进行比较;并且响应于 所述比较,在所述变化超过所述阈值时访问所述覆盖范围。
[0131]
实施例13可包括实施例1至12中的任一项,还包括:检测从所述远 程设备接收到的信号强度低于阈值信号强度;以及响应于所述检测,获得 所述活动数据。
[0132]
实施例14可包括实施例1至13中的任一项,还包括:基于所述覆盖 范围选择用于与所述远程设备通信的特定天线和/或特定波束;以及使得通 过所述特定天线或所述特定波束向所述远程设备发射数据并从所述远程设 备接收数据。
[0133]
实施例15包括无线设备,所述无线设备包括:至少一个运动传感器; 一个或多个天线阵列,每个天线阵列被配置用于至少两个波束配置;一个 或多个处理器;和存储指令的非暂态计算机可读存储介质,所述指令当由 所述一个或多个处理器执行时使得所述一个或多个处理器执行包括以下各 项的操作:从所述至少一个运动传感器获得运动数据,所述运动数据指示 所述无线设备的位置或取向的变化;基于所述运动数据确定所述无线设备 相对于远程设备的位姿的变化;针对所述无线设备相对于所述远程设备的 多个位姿中的每个位姿基于与以下相关联的覆盖范围来选择用于与所述远 程设备通信的特定天线和特定波束:用于与所述远程设备通信的所述一个 或多个天线阵列中的天线阵列;用于与所述远程设备通信的波束;或者用 于与所述远程设备通信的所述天线和所述波束两者;以及使得通过所述特 定天线和所述特定波束向所述远程设备发射数据。
[0134]
实施例16可包括实施例15,其中所述操作还包括:使用到达角 (aoa)数据确定所述无线设备相对于所述远程设备的初始位姿,其中所 述无线设备相对于所述远程设备的所述位姿基于指示所述无线设备从所述 初始位姿的所述位置或所述取向的变化的所述运动数据。
[0135]
实施例17可包括实施例15至16中的任一项,其中所述运动数据指示 所述无线设备的所述位置或所述取向在一段时间内没有变化,并且其中所 述操作还包括:确定所述无线设备与所述远程设备之间的通信信道的一个 或多个度量未能满足一个或多个相应阈值;响应于所述确定,识别来自所 述远程设备的最强信号的到达角(aoa)值;以及从所述覆盖范围识别与 所述覆盖范围中的所述aoa值相关联的所述特定波束和所述特定天线。
[0136]
实施例18可包括实施例15至17中的任一项,其中所述一个或多个度 量包括来自所述远程设备的信号的信噪比(snr)、所述信号的延迟扩展 值和所述信号的所述aoa的变化量值中的至少一者。
[0137]
实施例19可包括实施例15至18中的任一项,其中所述覆盖范围指示 所述特定天线和所述特定波束表示用于使得向所述远程设备发射数据或从 所述远程设备接收附加数据的最高增益。
[0138]
实施例20可包括实施例15至19中的任一项,其中所述一个或多个运 动传感器包括至少加速度计、陀螺仪或所述加速度计和所述陀螺仪两者。
[0139]
实施例21可包括实施例15至20中的任一项,其中所述无线设备和所 述远程设备被配置用于使用频率范围2(fr2)的mm波通信。
[0140]
实施例22可包括实施例15至21中的任一项,所述操作还包括:将所 述无线设备的所述位置或所述取向的所述变化与阈值变化值进行比较;响 应于所述比较,在所述变化超过所述阈值时访问所述覆盖范围。
[0141]
实施例23可包括实施例15至22中的任一项,所述操作还包括:检测 从所述远程设备接收到的信号强度低于阈值信号强度;以及响应于所述检 测,获得所述活动数据。
[0142]
实施例24可包括实施例15至23中的任一项,所述操作还包括:基于 所述覆盖范围选择用于与所述远程设备通信的特定天线和/或特定波束;以 及使得通过所述特定天线或所述特定波束向所述远程设备发射数据并从所 述远程设备接收数据。
[0143]
实施例25可包括用于用户装备(ue)的处理器,所述处理器包括: 被配置用于与远程设备通信的电路;和用于执行一个或多个指令的电路, 所述指令当被执行时使得所述处理器执行包括以下各项的操作:从耦接到 无线设备的一个或多个运动传感器获得运动数据,所述运动数据指示所述 无线设备的位置或取向的变化;基于所述运动数据确定所述无线设备相对 于远程设备的位姿;针对所述无线设备相对于所述远程设备的多个位姿中 的每个位姿基于与以下相关联的覆盖范围来选择用于与所述远程设备通信 的特定天线或特定波束:用于与所述远程设备通信的天线;用于与所述远 程设备通信的波束;或者用于与所述远程设备通信的所述天线和所述波束 配置两者;以及使得通过所述特定天线或所述特定波束向所述远程设备发 射数据或从所述远程设备接收数据。
[0144]
实施例26可包括实施例25,所述操作还包括:使用到达角(aoa)数 据确定所述无线设备相对于所述远程设备的初始位姿,其中所述无线设备 相对于所述远程设备的所述位姿基于指示所述无线设备从所述初始位姿的 所述位置或所述取向的变化的所述运动数据。
[0145]
实施例27可包括实施例25至26中的任一者,其中所述运动数据指示 所述无线设备的所述位置或所述取向在一段时间内没有变化,并且所述操 作还包括:确定所述无线设备与所述远程设备之间的通信信道的一个或多 个度量未能满足一个或多个相应阈值;响应于所述确定,识别来自所述远 程设备的最强信号的到达角(aoa)值;以及从所述覆盖范围识别与所述 覆盖范围中的所述aoa值相关联的所述特定波束和所述特定天线。
[0146]
实施例28可包括实施例25至27中的任一项,其中所述一个或多个度 量包括从所述远程设备接收到的信号的信噪比(snr)、所述信号的延迟 扩展值和所述信号的所述aoa的变化量值中的至少一者。
[0147]
实施例29可包括实施例25至28中的任一项,其中所述覆盖范围指示 所述特定天线和所述特定波束表示用于使得向所述远程设备发射数据或从 所述远程设备接收附加数据的最高增益。
[0148]
实施例30可包括实施例25至29中的任一项,其中所述一个或多个运 动传感器包括至少加速度计、陀螺仪或所述加速度计和所述陀螺仪两者。
[0149]
实施例31可包括实施例25至30中的任一项,其中所述无线设备和所 述远程设备被配置用于使用频率范围2(fr2)的mm波通信。
[0150]
实施例32可包括实施例25至31中的任一项,其中选择用于与所述远 程设备通信的所述特定天线和所述特定波束以小于2毫秒的延迟执行。
[0151]
实施例33可包括实施例25至32中的任一项,所述操作还包括周期性 地检索运动数据以确定所述无线设备是在移动还是静止。
[0152]
实施例34可包括实施例25至33中的任一项,其中所述无线设备包括 至少三个天线阵列,并且其中每个天线阵列包括至少10个波束配置。
[0153]
实施例35可包括实施例25至34中的任一项,其中基于所述运动数据 确定所述无线设备相对于所述远程设备的所述位姿包括:确定所述无线设 备的平移运动或旋转运动中的一者或多者超过运动阈值;以及响应于确定 超过所述运动阈值,访问所述覆盖范围。
[0154]
实施例36可包括实施例25至35中的任一项,所述操作还包括:将所 述无线设备的所述位置或所述取向的所述变化与阈值变化值进行比较;并 且响应于所述比较,在所述变化超过所述阈值时访问所述覆盖范围。
[0155]
实施例37可包括实施例25至36中的任一项,所述操作还包括:检测 从所述远程设备接收到的信号强度低于阈值信号强度;以及响应于所述检 测,获得所述活动数据。
[0156]
实施例38可包括实施例25至37中的任一项,所述操作还包括:基于 所述覆盖范围选择用于与所述远程设备通信的特定天线和/或特定波束;以 及使得通过所述特定天线或所述特定波束向所述远程设备发射数据并从所 述远程设备接收数据。
[0157]
实施例39可包括实施例1至67中任一项所述或与之相关的信号,或 其部分或部件。
[0158]
实施例40可包括根据实施例1至68中任一项所述或与之相关或在本 公开中以其他方式描述的数据报、信息元素、分组、帧、片段、pdu或消 息,或其部分或部件。
[0159]
实施例41可包括根据实施例1至38中任一项所述或与之相关或在本 公开中以其他方式描述的编码有数据的信号,或其部分或部件。
[0160]
实施例42可包括根据实施例1至38中任一项所述或与之相关或在本 公开中以其他方式描述的编码有数据报、ie、分组、帧、分段、pdu或消 息的信号,或其部分或部件。
[0161]
实施例43可以包括一种携带计算机可读指令的电磁信号,其中由一个 或多个处理器执行计算机可读指令将使得所述一个或多个处理器执行根据 实施例1至38中任一项所述或与之相关的方法、技术或过程或其部分。
[0162]
实施例44可包括一种计算机程序,所述计算机程序包括指令,其中由 处理元件执行所述程序将使所述处理元件执行根据实施例1至38中任一项 所述或与之相关的方法、技术或过程或其部分。
[0163]
实施例45可包括如本文所示和所述的无线网络中的信号。
[0164]
实施例46可包括如本文所示和所述的在无线网络中进行通信的方法。
[0165]
实施例47可包括如本文所示和所述的用于提供无线通信的系统。
[0166]
实施例48可包括如本文所示和所述的用于提供无线通信的设备。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。