技术特征:
1.一种基于边缘计算的监狱智能监控系统,其特征在于,包括:边缘计算单元,用于获取整个监狱室内的监控视频数据,根据获取的监控视频数据识别犯人的危险行为;提示信息生成单元,用于若识别出犯人的危险行为,则生成表示犯人存在危险行为的提示信息;报警单元,用于将所述提示信息发送给指定的终端设备,从而将所述提示信息通知给携带所述指定的终端设备的狱警。2.根据权利要求1所述的基于边缘计算的监狱智能监控系统,其特征在于,所述边缘计算单元还用于:在多个边缘计算节点中确定处于工作状态的边缘计算节点;将获取的监控视频数据实时发送给确定的处于工作状态的边缘计算节点;接收边缘计算节点返回的通过边缘计算识别监控视频数据中犯人的危险行为。3.根据权利要求2所述的基于边缘计算的监狱智能监控系统,其特征在于,所述边缘计算单元还用于:获取待绑定的边缘计算节点的特征标识;根据获取的特征标识与待绑定的边缘计算节点进行绑定;将获取的监控视频数据实时发送给绑定的边缘计算节点。4.根据权利要求3所述的基于边缘计算的监狱智能监控系统,其特征在于,所述边缘计算节点的特征标识包括所述边缘计算节点的id、二维码、条码、统一资源标识符url中的一种或多种。5.根据权利要求1所述的基于边缘计算的监狱智能监控系统,其特征在于,所述边缘计算单元还用于:将获取的监控视频数据中的每帧转化成对应的帧图像;对于每个帧图像,按照预先确定的n个选区的矩形区域坐标截取各帧图像里的n个矩形图像,其中n为大于1的正整数;对n个矩形图像进行处理,将n个矩形图像转化成指定边长的n个正方形图像,并按照预设排列顺序将n个正方形图像组成一个整体正方形图像;将所述整体正方形图像输入预先训练的危险行为动作识别模型,利用所述训练的危险行为动作识别模型对所述整体正方形图像对应的危险行为动作进行预测,得到预测结果;根据所述预测结果识别犯人的危险行为。6.根据权利要求5所述的基于边缘计算的监狱智能监控系统,其特征在于,所述边缘计算单元还用于:在对于每个帧图像,按照预先确定的n个选区的矩形区域坐标截取各帧图像里的n个矩形图像之前,判断监控摄像头当前采集监控视频数据与确定n个选区的矩形区域坐标时采集样本视频,是否发生位置变动;若发生位置变动,则确定位置变动的仿射转换矩阵;利用仿射转换矩阵对确定的n个选区的矩形区域坐标进行转换,得到转换后的n个选区的矩形区域坐标,从而对于每个帧图像,按照转换后的n个选区的矩形区域坐标截取各帧图像里的n个矩形图像。
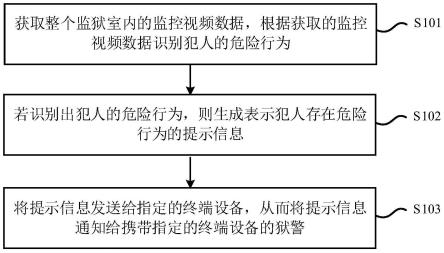
7.一种基于边缘计算的监狱智能监控方法,其特征在于,包括以下步骤:获取整个监狱室内的监控视频数据,根据获取的监控视频数据识别犯人的危险行为;若识别出犯人的危险行为,则生成表示犯人存在危险行为的提示信息;将所述提示信息发送给指定的终端设备,从而将所述提示信息通知给携带所述指定的终端设备的狱警。8.根据权利要求7所述的基于边缘计算的监狱智能监控方法,其特征在于,所述根据获取的监控视频数据识别犯人的危险行为,包括:在多个边缘计算节点中确定处于工作状态的边缘计算节点;将获取的监控视频数据实时发送给确定的处于工作状态的边缘计算节点;接收边缘计算节点返回的通过边缘计算识别监控视频数据中犯人的危险行为。9.根据权利要求8所述的基于边缘计算的监狱智能监控方法,其特征在于,所述将获取的监控视频数据实时发送给确定的处于工作状态的边缘计算节点,包括:获取待绑定的边缘计算节点的特征标识;根据获取的特征标识与待绑定的边缘计算节点进行绑定;将获取的监控视频数据实时发送给绑定的边缘计算节点。10.根据权利要求7所述的基于边缘计算的监狱智能监控方法,其特征在于,将所述提示信息发送给指定的终端设备,还包括:在所述犯人身上安装有gps定位装置、语音警告装置、鞋底设置有压力传感器以及在犯人衣服的关节处装设有机械控制装置,所述机械控制装置可以将犯人的关节锁住使得犯人的关节无法弯曲,首先将所述提示信息发送给携带所述指定的终端设备的狱警,然后再发送给犯人身上的语音警告装置,并开启犯人身上gps的使能将犯人的定位发送至携带所述指定的终端设备的狱警,所述语音装置会播放5次让犯人停止危险行为的语音,并观察犯人是否还存在危险行为,若还存在危险行为,则首先控制机械控制装置对犯人上半身关节进行锁定,然后通过设置在犯人鞋底的压力传感器判断当前犯人是否双脚稳定着地,然后当犯人双脚着地时控制机械控制装置对犯人膝盖部分的关节进行锁定,使其在身体稳定情况下再进行控制,防止犯人摔倒,其具体步骤包括,步骤a1:利用公式(1)根据语音播报的5次时间内犯人危险行为的存在情况控制机械控制装置的上半身锁定使能其中e(t0)表示当前时刻所述机械控制装置的上半身锁定使能控制值;t0表示当前时刻;w(t)表示t时刻检测到的所述犯人危险行为的存在值(若检测到所述犯人存在危险行为则w(t)=1,反之w(t)=0);t表示所述语音播报一次让犯人停止危险行为的语音所用的时间;t表示整数变量(单位为毫秒);若e(t0)=1,表示当前时刻需控制所述机械控制装置的上半身进行锁定;若e(t0)=0,表示当前时刻不控制所述机械控制装置,并继续检测所述犯人是否有危险行为然后再次进行步骤a1的计算和控制;步骤a2:利用公式(2)根据设置在犯人鞋底的压力传感器判断当前犯人是否双脚稳定
着地其中q(t0)表示当前时刻所述犯人双脚稳定着地的输出值;f(t0_i)表示当前时刻所述犯人双脚的第i个部位压力传感器采集到的数值(其中f(t0_1)表示犯人左脚的脚尖部位压力传感器采集到的数值,f(t0_2)表示犯人左脚的脚后跟部位压力传感器采集到的数值,f(t0_3)表示犯人右脚的脚尖部位压力传感器采集到的数值,f(t0_4)表示犯人右脚的脚后跟部位压力传感器采集到的数值);0.5n表示0.5牛的力;∧表示逻辑关系与;∨表示逻辑关系或;||表示求取绝对值;若q(t0)=1,表示当前时刻所述犯人双脚是稳定着地的状态;若q(t0)=0,表示当前时刻所述犯人双脚不是稳定着地的状态;步骤a3:利用公式(3)根据当前犯人双脚稳定输出值以及机械控制装置的上半身锁定使能控制机械控制装置的膝盖部分的关节锁定使能其中k(t0)表示当前时刻所述机械控制装置的膝盖部分的关节锁定使能控制值;若k(t0)=1,表示当前时刻需控制所述机械控制装置的膝盖部分的关节进行锁定,进而在犯人双脚稳定的状态下锁住犯人关节,使其无法移动;若k(t0)=0,表示当前时刻不控制所述机械控制装置。
技术总结
本申请提供了一种基于边缘计算的监狱智能监控系统和方法,涉及监控技术领域。该基于边缘计算的监狱智能监控方法包括获取整个监狱室内的监控视频数据,根据获取的监控视频数据识别犯人的危险行为;若识别出犯人的危险行为,则生成表示犯人存在危险行为的提示信息;将所述提示信息发送给指定的终端设备,从而将所述提示信息通知给携带所述指定的终端设备的狱警。本申请实施例能够毫不疏漏地监视监狱内的情况,防止犯人越狱或有其他违法行为,可以很好地协助狱警对监狱进行管理。以很好地协助狱警对监狱进行管理。以很好地协助狱警对监狱进行管理。
技术研发人员:余丹 兰雨晴 张腾怀 邢智涣 王丹星
受保护的技术使用者:慧之安信息技术股份有限公司
技术研发日:2022.03.10
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。