1.本发明涉及一种鲍鱼加工设备,更具体地说,它涉及一种鲍鱼自动宰杀流水线设备及其宰杀方法。
背景技术:
2.鲍鱼是名贵的“海珍品”之一,味道鲜美,营养丰富,被誉为海洋“软黄金”。研究表面,鲍鱼鲜品可食部分含蛋白质24%、脂肪0.44%;干品含蛋白质40%、糖元33.7%、脂肪0.9%以及多种维生素和微量元素,是一种对人体非常有利的高蛋白、低脂肪食物。
3.目前很多地方宰杀鲍鱼各个环节依然是采用传统的人工宰杀,浪费大量人力,有待改进。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种鲍鱼自动宰杀流水线设备及其宰杀方法,可以实现自动宰杀鲍鱼,节约大量人力。
5.为实现上述目的,本发明提供了如下技术方案:
6.一种鲍鱼自动宰杀流水线设备,包括:
7.输送平台,其用于输送鲍鱼;
8.检测装置,其包括位于输送平台上方的可伸缩压力探测机构,通过压力探测机构挤压鲍鱼,并将鲍鱼反馈的压力值反馈至控制器;
9.机械手,其沿输送方向设置于检测装置的后方,其用于夹取输送平台上的鲍鱼,对鲍鱼翻面,并将翻面后的鲍鱼放回至输送平台上;
10.方向调节装置,其沿输送方向设置于机械手的后方,其用于与输送平台上的鲍鱼接触并驱动鲍鱼转动;
11.护栏装置,其沿输送方向设置于方向调节装置的后方,其内部为供输送平台上的鲍鱼通过的通道,通道的宽度大于鲍鱼的短轴长度且小于鲍鱼的长轴宽度,通道的进料端紧邻方向调节装置,通道的进入端呈漏斗状;
12.固定装置,其设置于输送平台的出料端,固定装置的台面与输送平台的台面之间形成落差,使得固定装置能承接输送平台送出的鲍鱼,在输送平台的尾端与固定装置之间设置有向下弯曲的引导板,在引导板的下方设置有出壳口;
13.挖取装置,其设置于固定装置的上方,其用于挖取固定装置上的鲍鱼的鲍肉;
14.控制器,其用于控制输送平台、机械手、方向调节装置、护栏装置、固定装置以及挖取装置。
15.作为优选方案:所述通道的上方设置有用于检测鲍鱼的距离传感器,距离传感器与控制器电连接。
16.作为优选方案:所述检测装置包括竖向设置的第一支撑板,第一支撑板的下端与输送平台的侧部固定,第一支撑板的上端装有第一电机,在第一电机的下方设置有竖向的
第一丝杆,第一电机的输出轴与第一丝杆同轴连接,在第一支撑板上套设有可上下滑动的第一滑套,第一丝杆与第一滑套螺纹连接,在第一滑套的侧部固定有竖向的套筒,在套筒内部从上往下依次设置有压力传感器、接触块、第一弹簧和连接块,接触块和连接块均可在套筒内活动,第一弹簧处于压缩状态,在套筒的下方设置有竖向的顶杆,顶杆的上端穿入套筒内并与连接块连接固定,顶杆的下端位于输送平台的中轴线上方,压力传感器与控制器电连接。
17.作为优选方案:所述固定装置包括中空的安装座,在安装座的两侧对称设置有夹紧机构,夹紧机构包括固定板,在固定板的外侧面设置有由第一气缸驱动升降的夹板,在夹板的内侧面上设置有活动板,活动板与夹板转动连接,在活动板的内侧面上沿其高度方向固定有多组压力感应片,压力感应片与控制器电连接,在压力感应片的内侧面上固定有具有弹性的侧接触垫,固定板与安装座滑移连接,在安装座内装有第三电机和水平的驱动盘,第三电机的输出轴与驱动盘同轴连接,在驱动盘与固定板之间设置有水平的连杆,连杆的两端分别与驱动盘和固定板铰接,在安装座的尾端固定有水平的第三支撑板,在第三支撑板上套设有第二滑套,在第三支撑板的尾端固定有第四电机,在第四电机的前方设置有第二丝杆,第四电机的输出轴与第二丝杆同轴连接,第二丝杆与第二滑套螺纹连接,在第二滑套上固定有竖向的第二气缸,在第二气缸的上方设置有推挤块,第二气缸的推杆与推挤块连接,在推挤块朝向安装座的一面上设置有具有弹性的前接触垫。
18.作为优选方案:所述挖取装置包括横向设置的第四支撑板,在第四支撑板的尾端装有第五电机,在第五电机的前方设置有第三丝杆,第三丝杆平行于第四支撑板,第五电机的输出轴与第三丝杆同轴连接,在第四支撑板上平行设置有一对横向导向杆,在横向导向杆上套设有第三滑套,第三丝杆与第三滑套螺纹连接,在第三滑套的底部固定有刮板,在刮板的下方设置有汤匙形的刮刀,刮刀的刀刃朝向输送平台的输送方向,在刮板的后部设置有竖向的定位筒,在定位筒内设置有可上下活动的活动杆,活动杆贯穿定位筒并在其上端固定有限位片,活动杆的下端与刮刀连接,在活动杆上套设有第二弹簧,第二弹簧用于驱动刮刀向下运动,在第四支撑板的两端固定有一对竖向导向杆,竖向导向杆活动穿过支撑架,在第四支撑板的上方还设置有第三气缸,第三气缸的缸体与支撑架连接,第三气缸的推杆与第四支撑板连接。
19.作为优选方案:还包括上料平台,上料平台倾斜设置,上料平台的进料端伸入鲍鱼的存储箱内,上料平台的出料端与输送平台的进料端衔接,在上料平台的皮带上等间距设置有多组槽位,在上料平台的台面上方还固定有“门”形的限制架。
20.一种如所述的鲍鱼自动宰杀流水线设备的鲍鱼宰杀方法,包括以下步骤:s1、通过上料平台将鲍鱼转移到输送平台上;
21.s2、通过输送平台以一定的节拍输送鲍鱼,当鲍鱼移动到检测装置下方时暂停输送平台,通过检测装置检测鲍鱼的正反面,检测完成后输送平台恢复运行;
22.s3、在下一节拍处暂停输送平台,根据检测装置上一次的检测结果来控制机械手,若上一次的检测结果是鲍鱼正面朝上则机械手不动作;若上一次的检测结果是鲍鱼反面朝上则控制机械手对鲍鱼翻面;
23.s4、继续输送鲍鱼,同时通过方向调节装置驱动鲍鱼转动,使鲍鱼通过一狭长的通道,从而使鲍鱼的长轴平行于输送方向;在鲍鱼通过通道的过程中通过距离传感器检测鲍
鱼,从而确定鲍鱼何时会被转移到固定装置上,还能通过距离传感器检测到鲍鱼的时间和输送速度获得鲍鱼的长度数据和高度数据;
24.s5、继续输送鲍鱼,当鲍鱼被转移到固定装置上时暂停输送平台,并通过控制器控制第三电机转动使固定装置两侧的夹紧机构夹紧鲍鱼的两侧,再控制第四电机转动使推挤块与鲍鱼的尾端接触;
25.s6、根据鲍鱼长度数据和推挤块的移动量确定刮刀应该移动至鲍鱼头端的何处,以确保刮刀下刀时刚好能挖到鲍肉的边缘,控制第四电机的转动圈数使刮刀横移至所需下刀位置的上方;根据刮刀距离固定装置台面的初始距离、鲍鱼的高度数据和第二弹簧的压缩行程得到刮刀的下降行程,控制第三气缸使刮刀按照下降行程下降,此时刮刀刚好位于合适的下刀位置,此时刮刀与鲍壳的内边缘底部紧密接触;
26.s7、控制第五电机驱动刮刀由前向后挖取鲍肉,刮刀将贝柱割断,从而使鲍肉与鲍壳分离,在此过程中,弹簧的弹力驱使刮刀的刀刃始终贴紧鲍壳的底面,当刮刀从鲍壳的尾端滑出时,其接触到前接触垫,此时控制器控制第五电机停止运行,随后控制器控制第四电机驱动推挤块后移一小段距离,此时鲍肉由于失去推挤块的支撑而自由下落,落入到固定装置下方的鲍肉收集箱内;随后控制器控制第三电机动作使两组夹紧机构背向移动直至复位,从而将鲍壳松开;之后控制器控制第四电机再次驱动推挤块向前移动,推挤块将空的鲍壳推向出壳口,使鲍壳从出壳口掉落,落到出壳口下方的鲍壳收集箱内;最后控制器控制第四电机、第五电机、第一气缸和第三气缸,使固定装置和挖取装置完全复位。
27.作为优选方案:s5步骤中,当固定装置两侧的夹紧机构夹住鲍鱼的两侧后,鲍壳两侧不同高度位置的压力感应条检测到压力,并向控制器反馈压力信号,控制器根据该两组压力感应条的高度落差,取高度落差值的一半作为补偿高度值,并对高度较低的压力感应片所在的夹紧机构的气缸即第一气缸进行控制,使其驱动夹板上升直至夹板的上升行程等于补偿高度值,之后再控制第四电机,使推挤块与鲍鱼接触。
28.作为优选方案:s7步骤中,在刮刀到达下刀处时,控制器控制第二气缸上升一小段距离,由于夹紧机构的活动板可以相对于夹板转动,而推挤块向上推挤鲍鱼的尾端,从而使鲍鱼的头端向下摆动一定角度,提高刮刀与鲍壳头端的贴合度;而当刮刀的行程即将等于鲍鱼的长度时,控制器控制第二气缸下降一段距离,使鲍鱼的尾端向下摆动一定角度,提高刮刀与鲍壳尾端的贴合度,当推挤块将空鲍壳推出后,控制器控制第二气缸复位。
29.与现有技术相比,本发明的优点是:本发明实现了鲍鱼自动宰杀节约大量人力,可以节约人力成本。
附图说明
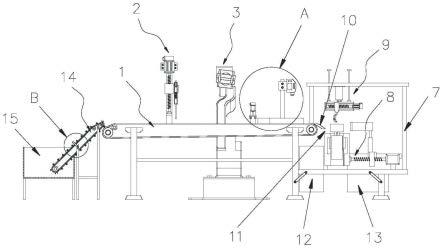
30.图1为实施例一中的流水线设备的整体结构示意图;
31.图2为图1中的a部放大图;
32.图3为图1中的b部放大图;
33.图4为实施例一中的检测装置的剖视图;
34.图5为实施例一中的固定装置的拆解结构示意图;
35.图6为图5中的c部放大图;
36.图7为实施例一中的挖取装置的结构示意图;
37.图8为图7中的d部放大图;
38.图9为实施例一中的控制原理图。
39.附图标记说明:1、输送平台;2、检测装置;201、第一支撑板;202、第一电机;203、第一滑套;204、第一丝杆;205、套筒;206、连接块;207、第一弹簧;208、接触块;209、压力传感器;3、机械手;4、方向调节装置;401、第二电机;402、第二支撑板;403、转盘;404、软刷;5、护栏;6、距离传感器;7、支撑架;8、固定装置;801、安装座;802、第三电机;803、驱动盘;804、连杆;805、通孔;806、固定板;807、连接柱;808、连接座;809、第一气缸;810、夹板;811、活动板;812、压力感应片;813、侧接触垫;814、第三支撑板;815、第二滑套;816、第四电机;817、第二丝杆;818、第二气缸;819、推挤块;820、前接触垫;9、挖取装置;901、第四支撑板;902、第五电机;903、第三丝杆;904、第三滑套;905、横向导向杆;906、第三气缸;907、竖向导向杆;908、刮板;909、刮刀;910、定位筒;911、活动杆;912、第二弹簧;10、引导板;11、出壳口;12、鲍壳收集箱;13、鲍肉收集箱;14、上料平台;1401、梁架;1402、皮带;1403、槽位;1404、限制架;15、储存箱。
具体实施方式
40.实施例一:
41.参照图1,一种鲍鱼自动宰杀流水线设备,包括用于输送鲍鱼的输送平台1,在输送平台1上沿着鲍鱼的输送方向依次设置有检测装置2、机械手3、方向调节装置4、护栏5装置、固定装置8和挖取装置9,还包括控制器,输送平台1的驱动电机与控制器连接,由控制器控制输送平台1的运行。
42.参照图1和4,本实施例中的检测装置2包括竖向设置的第一支撑板201,第一支撑板201的下端与输送平台1的侧部固定,第一支撑板201的上端装有第一电机202,在第一电机202的下方设置有竖向的第一丝杆204,第一电机202的输出轴与第一丝杆204同轴连接,在第一支撑板201上套设有可上下滑动的第一滑套203,第一丝杆204与第一滑套203螺纹连接,在第一滑套203的侧部固定有竖向的套筒205,在套筒205内部从上往下依次设置有压力传感器209、接触块208、第一弹簧207和连接块206,接触块208和连接块206均可在套筒205内活动,第一弹簧207处于压缩状态,在套筒205的下方设置有竖向的顶杆,顶杆的上端穿入套筒205内并与连接块206连接固定,顶杆的下端位于输送平台1的中轴线上方。压力传感器209与控制器的采样信号输入端连接,第一电机202与控制器连接,通过控制器控制第一电机202正转和反转可以驱动套筒205匀速上下移动,当顶杆的下端与输送平台1上的鲍鱼接触时,若套筒205继续下降,此时弹簧会被压缩变短。
43.通过在输送平台1上等间距标记放置点,检测装置2与机械手3之间的距离刚好等于输送平台1运行一节拍的行程。在输送平台1的进料端将鲍鱼一一摆放在放置点上,通过控制器对输送平台1的运行节拍控制,可以实现鲍鱼移动至检测装置2和机械手3正下方时,输送平台1暂停运行,压力检测和翻面完成后,输送平台1恢复运行,从而保证对每一只鲍鱼的检测以及将方向不对的鲍鱼翻过来。
44.若鲍鱼是鲍壳朝上(反面朝上),则当鲍壳的边缘与输送平台1的表面接触后,继续下压套筒205,此后弹簧是线性变短,即传递至压力传感器209的压力是线性变化的;若鲍鱼是鲍肉朝上(正面朝上),由于鲍肉是软质的,则在套筒205下压的过程中,当顶杆与鲍肉接
触后,传递至压力传感器209的压力是不会呈线性变化的,压力传感器209将检测到压力值反馈至控制器,使得控制器可以通过压力探测来判断输送平台1上的鲍鱼的正反面。
45.本实施例中的机械手3带有用于夹取鲍鱼的夹具,并可执行开夹、闭夹、夹具旋转和夹具升降这几个维度的动作。
46.机械手3与控制器连接,当控制器判断出当前鲍鱼是鲍壳朝上时,则在下一节拍时暂停输送平台1,此时鲍壳朝上的鲍鱼正好位于机械手3的正下方,随后控制器控制机械手3开夹并降低夹具,闭夹夹住鲍鱼并上移夹具,之后将夹具转动180度,降低夹具并开夹,从而将鲍鱼翻面并放回输送平台1,之后夹具复位。如此能保证鲍鱼的鲍肉朝上。
47.由于鲍鱼的形状是近似的椭圆形,其具有长轴和短轴,为保证顺利后续顺利挖取鲍肉,本流水线要保证鲍鱼的长轴方向平行于输送平台1的输送方向。
48.参照图1和2,本实施例中的方向调节装置4包括竖向设置的第二支撑板402,第二支撑板402的下端与输送平台1的侧部固定,在第二支撑板402的上端装有第二电机401,在第二电机401的下方设置有水平的转盘403,第二电机401的输出轴与转盘403同轴连接,转盘403的中心位于输送平台1的中轴线的上方,在转盘403的底面设置有用于与鲍鱼接触的软刷404。
49.在流水线运行的过程中,第一电机202始终处于运行状态,即转盘403是带动软刷404不停旋转的。当输送平台1将鲍鱼输送至方向调节装置4的下方时,软刷404与鲍鱼接触,并带动鲍鱼旋转。
50.紧邻方向调节装置4设置的护栏5装置由两组平行设置于输送平台1两侧的护栏5构成,两组护栏5之间形成供鲍鱼通过的通道,改通道的宽度大于鲍鱼的短轴长度并小于鲍鱼的长轴长度。护栏5的进入端向外弯曲使得通道的进入端呈漏斗状,这样既有利于鲍鱼顺利进入通道内,又允许鲍鱼一边移动一边由方向调节装置4驱动其转动,即鲍鱼可以留白进入通道内,防止鲍鱼堵在通道的进入端。
51.经过方向调节装置4与护栏5装置的配合工作后,从护栏5装置送出的鲍鱼都是长轴平行于输送方向的。
52.在护栏5装置的正上方设置装有距离传感器6,距离传感器6的探头朝向输送平台1。距离传感器6与控制器的采样信号输入端连接。当通道内无鲍鱼通过时,距离传感器6输出的距离检测值是恒定的;当通道内有鲍鱼通过时,距离传感器6输出的距离检测值是动态变化的。通过距离传感器6输出的信号可以判断鲍鱼是否堵在通道的进入端,出现拥堵时暂停输送平台1;且可以判断鲍鱼何时经过距离传感器6,如此可以知道鲍鱼离输送平台1的尾端还有多少距离,进而可以计算出多久后能将该鲍鱼输送至固定装置8,届时可以控制输送平台1暂停,当鲍鱼在固定装置8处完成加工后再控制输送平台1恢复运行。保证固定装置8处每次只对一只鲍鱼进行加工。
53.参照图1,本实施例中,固定装置8通过支撑架7安装在输送平台1的出料端,固定装置8的台面与输送平台1的台面之间形成落差,使得固定装置8能承接输送平台1送出的鲍鱼,在输送平台1的尾端与固定装置8之间设置有向下弯曲的引导板10。引导板10与输送平台1连接固定,其表面光滑,引导板10用于将输送平台1尾端的鲍鱼引导至固定装置8的台面上。在引导板10的下方设置有出壳口11。
54.参照图1、图5和图6,本实施例中的固定装置8包括中空的安装座801,在安装座801
的两侧对称设置有夹紧机构,夹紧机构包括固定板806,在固定板806的外侧面装有竖向的第一气缸809,在第一气缸809的上方设置有夹板810,第一气缸809的推杆与夹板810连接,在夹板810的内侧面(即朝向安装座801的一面)上设置有活动板811,活动板811与夹板810转动连接(活动板811与夹板810的连接方式为常规的轴孔连接,从而实现活动板811的转动,图中未示出轴和孔),在活动板811的内侧面上沿其高度方向固定有多组压力感应片812,压力感应片812与控制器的采样信号输入端连接,在压力感应片812的内侧面上固定有具有弹性的侧接触垫813。在固定板806的内侧面沿固定装置8的宽度方向设置有多组连接柱807,在安装座801上设置多组通孔805,连接柱807一一插入通孔805内,如此使得两组夹紧机构可以相向或背向移动。
55.在安装座801内装有第三电机802和水平的驱动盘803,第三电机802的输出轴与驱动盘803同轴连接,在驱动盘803与固定板806之间设置有水平的连杆804,连杆804的两端分别与驱动盘803和固定板806铰接。第三电机802转动带动驱动盘803转动,驱动连杆804运动,进而驱动两组夹紧机构相向或背向移动。
56.在安装座801的尾端固定有水平的第三支撑板814,在第三支撑板814上套设有第二滑套815,在第三支撑板814的尾端固定有第四电机816,在第四电机816的前方设置有第二丝杆817,第四电机816的输出轴与第二丝杆817同轴连接,第二丝杆817与第二滑套815螺纹连接,在第二滑套815上固定有竖向的第二气缸818,在第二气缸818的上方设置有推挤块819,第二气缸818的推杆与推挤块819连接,在推挤块819朝向安装座801的一面上设置有具有弹性的前接触垫820。
57.参照图1、图7和图8,本实施例中的挖取装置9通过支撑架7安装于固定装置8的上方。挖取装置9包括横向设置的第四支撑板901,在第四支撑板901的尾端装有第五电机902,在第五电机902的前方设置有第三丝杆903,第三丝杆903平行于第四支撑板901,第五电机902的输出轴与第三丝杆903同轴连接,在第四支撑板901上平行设置有一对横向导向杆905,在横向导向杆905上套设有第三滑套904,第三丝杆903与第三滑套904螺纹连接,在第三滑套904的底部固定有刮板908,在刮板908的下方设置有汤匙形的刮刀909,刮刀909的刀刃朝向输送平台1的输送方向,在刮板908的后部设置有竖向的定位筒910,在定位筒910内设置有可上下活动的活动杆911,活动杆911贯穿定位筒910并在其上端固定有限位片,活动杆911的下端与刮刀909连接,在活动杆911上套设有第二弹簧912,第二弹簧912用于驱动刮刀909向下运动。
58.在第四支撑板901的两端固定有一对竖向导向杆907,竖向导向杆907活动穿过支撑架7,在第四支撑板901的上方还设置有第三气缸906,第三气缸906的缸体与支撑架7连接,第三气缸906的推杆与第四支撑板901连接。
59.参照图1和图3,本实施例中的流水线设备还包括上料平台14,上料平台14倾斜设置,上料平台14的进料端伸入鲍鱼的存储箱15内,上料平台14的出料端与输送平台1的进料端衔接。在上料平台14的皮带1402上等间距设置有多组槽位1403。当上料平台14运行时可以使存储箱15内的鲍鱼进入槽位1403内并可靠地将鲍鱼送到输送平台1上,还可以使鲍鱼之间的间距相等,便于与输送平台1的节拍配合。在上料平台14的台面上方还固定有“门”形的限制架1404,限制架1404可以防止上料平台14出现鲍鱼堆叠,保证一个槽位1403内只有一只鲍鱼。
60.参照图9,本实施例中的控制器为plc控制,压力传感器209、距离传感器6和压力感应片812的输出端均与plc控制器的采样信号输入端连接,plc控制器的控制端与各个电机、各个气缸以及输送平台1和上料平台14连接,plc控制器的控制端还与机械手3驱动器连接,用于控制电机、气缸、机械手3和平台。
61.实施例二:
62.一种适用于实施例一中的流水线设备的鲍鱼宰杀方法,包括以下步骤:
63.s1、通过上料平台14将鲍鱼转移到输送平台1上;
64.s2、通过输送平台1以一定的节拍输送鲍鱼,当鲍鱼移动到检测装置2下方时暂停输送平台1,通过检测装置2检测鲍鱼的正反面,检测完成后输送平台1恢复运行;
65.s3、在下一节拍处暂停输送平台1,根据检测装置2上一次的检测结果来控制机械手3,若上一次的检测结果是鲍鱼正面朝上则机械手3不动作;若上一次的检测结果是鲍鱼反面朝上则控制机械手3对鲍鱼翻面;
66.s4、继续输送鲍鱼,同时通过方向调节装置4驱动鲍鱼转动,使鲍鱼通过一狭长的通道,从而使鲍鱼的长轴平行于输送方向;在鲍鱼通过通道的过程中通过距离传感器6检测鲍鱼,从而确定鲍鱼何时会被转移到固定装置8上,还能通过距离传感器6检测到鲍鱼的时间和输送速度获得鲍鱼的长度数据和高度数据;
67.s5、继续输送鲍鱼,当鲍鱼被转移到固定装置8上时暂停输送平台1,并通过控制器控制第三电机802转动使固定装置8两侧的夹紧机构夹紧鲍鱼的两侧,再控制第四电机816转动使推挤块819与鲍鱼的尾端接触;电机均采用力矩控制的方式,控制器根据电机力矩的变化判断夹紧机构和推挤块819是否与鲍鱼接触,当电机的力矩变大时,控制电机停止转动,从而实现对鲍鱼的夹紧固定,又不会夹坏鲍鱼;
68.考虑到鲍鱼形状的不规则性,当鲍鱼被转移到固定装置8的台面上时,其可能出现左右两侧具有较大的高度落差,即左右倾斜度较高,如此可能导致刮刀909的刀刃不能较好地与鲍壳的内底面贴合,导致挖取不彻底。因此本实施例中,当固定装置8将鲍鱼夹紧后,还会对鲍鱼的左右倾斜对进行调节,具体为:固定装置8两侧的夹紧机构夹住鲍鱼的两侧后,鲍壳的两边分别与两块侧接触垫813上不同高度位置的部位接触,并将挤压力传递至接触部外侧的压力感应条,由于不同的压力感应条的初始高度位置都是已知的,当鲍壳的两侧被其两边的夹紧机构后,其两侧不同高度位置的压力感应条检测到压力,并向控制器反馈压力信号,控制器根据该两组压力感应条的高度落差,取高度落差值的一半作为补偿高度值,并对高度较低的压力感应片812所在的夹紧机构的气缸即第一气缸809进行控制,使其驱动夹板810上升直至夹板810的上升行程等于补偿高度值,如此即实现了对鲍鱼倾斜的校正,使鲍壳的左右两侧的高度更加接近,确保后续刮刀909能够更高效彻底地挖取鲍肉。之后再控制第四电机816,使推挤块819与鲍鱼接触。
69.s6、根据鲍鱼长度数据和推挤块819的移动量确定刮刀909应该移动至鲍鱼头端的何处,以确保刮刀909下刀时刚好能挖到鲍肉的边缘,控制第四电机816的转动圈数使刮刀909横移至所需下刀位置的上方;根据刮刀909距离固定装置8台面的初始距离l1、鲍鱼的高度数据l2和第二弹簧912的压缩行程l3得到刮刀909的下降行程y(y=l1-l2 k*l3,k为一系数,根据鲍壳的平均厚度确定其至值,可以根据实际情况自行调整),控制第三气缸906使刮刀909按照下降行程下降,此时刮刀909刚好位于合适的下刀位置,此时刮刀909与鲍壳的内
边缘底部紧密接触,第二弹簧912处于最大弹力状态;
70.s7、控制第五电机902反向转动,驱动刮刀909由前向后挖取鲍肉,刮刀909将贝柱割断,从而使鲍肉与鲍壳分离,在此过程中,弹簧的弹力驱使刮刀909的刀刃始终贴紧鲍壳的底面,当刮刀909从鲍壳的尾端滑出时,其接触到前接触垫820,此时控制器检测到第五电机902的力矩增大而控制第五电机902停止运行,随后控制器控制第四电机816反向转动,驱动推挤块819后移一小段距离,此时鲍肉由于失去推挤块819的支撑而自由下落,落入到固定装置8下方的鲍肉收集箱13内;随后控制器控制第三电机802反转,使两组夹紧机构背向移动直至复位,从而将鲍壳松开;之后控制器控制第四电机816反向转动再次驱动推挤块819向前移动,推挤块819将空的鲍壳推向出壳口11,使鲍壳从出壳口11掉落,落到出壳口11下方的鲍壳收集箱12内;最后控制器控制第四电机816、第五电机902、第一气缸809和第三气缸906,使固定装置8和挖取装置9完全复位。
71.考虑到鲍壳首尾两端的弯曲度大于其中段的弯曲度,刮刀909在鲍鱼的首尾两端挖肉时,刀刃可能与鲍壳的贴合度不高,尤其是对一些形状比较独特的鲍壳,此时可能存在鲍肉挖取不干净的情况,造成浪费。
72.为尽量减少浪费,本实施例中在刮刀909到达下刀处时,控制器控制第二气缸818上升一小段距离,由于夹紧机构的活动板811可以相对于夹板810转动,而推挤块819向上推挤鲍鱼的尾端,从而使鲍鱼的头端向下摆动一定角度,提高刮刀909与鲍壳头端的贴合度;而当刮刀909的行程即将等于鲍鱼的长度时,控制器控制第二气缸818下降一段距离,使鲍鱼的尾端向下摆动一定角度,提高刮刀909与鲍壳尾端的贴合度,从而能减少鲍肉的浪费。
73.当推挤块819将空鲍壳推出后,控制器控制第二气缸818复位。
74.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
