1.本发明属于飞行器领域,公开了一种可变形柔性变形翼飞行器。
背景技术:
2.自然界的飞行生物无一例外地采用扑翼飞行方式,扑翼飞行器产生的气动性能优于固定翼飞行器的气动性能且扑翼飞行器的机动性能好,易于改变飞行状态。另一方面,采用扑翼方式设计的飞行器能够提高飞行器的隐蔽性,可在军事、民用和科研等诸多领域发挥重要的作用。
3.现有的中大型扑翼飞行器根据翼形分为不可变形翼和可变形翼。不可变形翼其机翼形态保持不变,属于刚性的平直翼,气动性能和机动性能较差;现阶段的可变形翼,分为两段翼和三段翼,三段翼飞行器的扑翼分为主翼、中翼、尾翼三部分。
4.目前,两段翼飞行器的扑翼控制机构多在左右两翼使用单曲柄摇杆机构加辅助杆,传动空间大且容易损坏;在飞行中,过大的传动空间还会导致飞行器整体重心跃动,不利于飞行器的飞行平稳;为了保证扑翼的扑动频率,多使用金属传动机构导致飞行器死重过大;而三段翼飞行器的控制机构、传动机构较为复杂,自重较大,飞行器的飞行平稳性和续航性较差。
5.综上,从仿生学角度,如何扑翼飞行器最大程度上接近实鸟扑翼结构特征及运动机理,以及如何使扑翼飞行器的飞行过程中保持稳定且灵活的飞行姿态,同时又兼具设计质量轻、结构简单以及承载能力高的机械结构是领域内面临的主要问题
技术实现要素:
6.针对现有技术的不足,本发明提供一种可变形柔性变形翼飞行器,可变形柔性翼、转向翼等机构更接近实鸟扑翼结构特征及运行机理,通过计算仿真,优化机械结构装置的双“s”形对偶力矩的传动机构,以及副翼攻角的随位姿变化大大提高了扑翼飞行过程中的稳定灵活性,且相应的机构设计具有质量轻、简单以及承载能力高的的优点。
7.为实现上述目的,本发明提供了如下技术方案为:
8.一种可变形柔性变形翼飞行器,其特征在于,包括:基架;升降机构,包括升降驱动单元和相对设置的两个升降翼单元,升降驱动单元设置在基架上,升降翼单元设置在升降驱动单元上,并且升降驱动单元用于驱动两个升降翼单元相对于基架同步上下摆动;转向机构,包括转向驱动单元和转向翼,转向驱动单元设置在基架上,转向翼设置在转向驱动单元上,并且转向驱动单元用于驱动转向翼相对于基架摆动;其中,升降翼单元包括相互活动连接的升降主翼和可变形子翼,可变形子翼包括翼肋扭曲组件和可变形翼肋,可变形翼肋包括孔内联动杆,翼肋扭曲组件用于驱动孔内联动杆相对升降主翼进行上下摆动,从而可变形子翼产生攻角变化。
9.优选地,升降主翼和可形子翼的翼展方向相同,可变形翼肋的数量为多个且沿翼展方向均匀分布,可变形翼肋具有翼肋通孔,孔内联动杆位于翼肋通孔内。
10.进一步地,翼肋扭曲组件包括电机支撑杆、扭曲驱动电机、电机支撑杆、扭曲齿轮对以及翼肋联动杆,扭曲驱动电机通过电机支撑杆固设在可变形子翼的一端,翼肋联动杆沿翼展方向延伸且穿设在至少两个孔内联动杆上,扭曲齿轮对的输入端与扭曲驱动电机的输出端转速耦合,翼肋联动杆与扭曲齿轮对的输出端转速耦合。
11.再进一步地,本发明还包括控制组件,包括位姿传感器和上位机,位姿传感器用于采集基架相对于水平面的角度值,并作为水平夹角值,上位机根据水平夹角值控制扭曲驱动电机的转向和/或转速。
12.优选地,升降驱动单元包括升降驱动电机和力偶输出组件,升降驱动电机设置在基架上,力偶输出组件的输入端与升降驱动电机转矩耦合,力偶输出组件的输出端用于输出沿竖直方向的扑动力偶,扑动力偶用于驱动升降主翼上下摆动。
13.进一步地,力偶输出组件包括同步曲轴、传动齿轮、配合内齿圈以及成对设置的力偶输出杆,同步曲轴活动设置在基架上,同步曲轴具有传动轴段、第一输出轴段以及第二输出轴段,并且第一输出轴段与传动轴段、第二输出轴段均不同轴,配合内齿圈设置在基架上,传动齿轮套设在传动轴段上且与配合内齿圈啮合配合,成对设置的力偶输出杆的一端分别铰接设置在第一输出轴段和第二输出轴段上,另一端沿竖直方向均铰接设置在升降主翼上。
14.再进一步地,力偶输出杆的两端均为弧形,且两端的弧形隆起方向相反。
15.再再进一步地,力偶输出杆呈“s”型,两端的弧度分别为1.127和1.223,当同步曲轴旋转时,力偶输出杆的摆动幅度为0-26
°
。
16.再进一步地,力偶输出杆的数量为两对,与两个升降翼单元一一对应,对应两个升降主翼的较上方的铰接点的不同对的两个力偶输送杆分别铰接设置在第一输出轴段和第二输出轴段上。
17.优选地,转向驱动单元包括可摆动设置在基架上的摆动固定子架和均固设在基架上的多个子架驱动组件,转向翼固设在摆动固定子架上,多个子架驱动组件用于在摆动固定子架上的至少两个不同的位置施加控制线性力,从而多个控制线性力驱动摆动固定子架进行空间摆动,进而使得转向翼进行空间摆动。
18.与现有技术相比,本发明的有益效果是:
19.1.因为本发明的可变形柔性变形翼飞行器包括基架、升降机构以及转向机构,升降机构包括升降驱动单元和相对设置的两个升降翼单元,升降驱动单元设置在基架上,升降翼单元设置在升降驱动单元上;转向机构包括转向驱动单元和转向翼,转向驱动单元设置在基架上,转向翼设置在转向驱动单元上;升降翼单元包括相互活动连接的升降主翼和可变形子翼,可变形子翼包括翼肋扭曲组件和可变形翼肋,可变形翼肋包括孔内联动杆,翼肋扭曲组件用于驱动孔内联动杆相对升降主翼进行上下摆动,从而可变形子翼产生攻角变化,在本发明的可变形柔性变形翼飞行器上升、下降或者转向时,在外部信号驱动下,翼肋扭曲组件驱动翼肋的孔内联动杆弹性摆动,从而使得翼肋发生变形,形成相对升降主翼的摆动,从而可变形子翼随摆动形成攻角的变化,因此,本发明通过简单的结构设置,实现在飞行过程中在较大范围的攻角变化,从而使得上升、下降或者转向过程中可变形柔性变形翼飞行器更加平稳。
20.2.因为本发明的翼肋扭曲组件包括电机支撑杆、扭曲驱动电机、电机支撑杆、扭曲
齿轮对以及翼肋联动杆,扭曲驱动电机通过电机支撑杆固设在可变形子翼的一端,翼肋联动杆沿翼展方向延伸且穿设在至少两个孔内联动杆上,扭曲齿轮对的输入端与扭曲驱动电机的输出端转速耦合,翼肋联动杆与扭曲齿轮对的输出端转速耦合,因此,本发明可通过信号控制扭曲驱动电机的形式精确地控制可变形子翼的攻角角度,且通过电机支撑杆的设置,使得扭曲驱动电机,扭曲齿轮对的输入端的荷载均不在可变形子翼的变形部位上,从而大大降低了可变形子翼的变形部位的荷载,使得扭曲齿轮对产生的扭动传递效率大大提高。
21.3.因为本发明还包括控制组件,包括位姿传感器和上位机,位姿传感器用于采集基架相对于水平面的角度值,并作为水平夹角值,上位机根据水平夹角值控制扭曲驱动电机的转向和/或转速,因此,本发明能通过位姿传感器完成信号采集,攻角变化的自控制,从而使得控制的精确度大大提高。
22.4.因为本发明的力偶输出组件包括同步曲轴、传动齿轮、配合内齿圈以及成对设置的力偶输出杆,同步曲轴活动设置在基架上,同步曲轴具有传动轴段、第一输出轴段以及第二输出轴段,并且第一输出轴段与传动轴段、第二输出轴段均不同轴,配合内齿圈设置在基架上,传动齿轮套设在传动轴段上且与配合内齿圈啮合配合,成对设置的力偶输出杆的一端分别铰接设置在第一输出轴段和第二输出轴段上,另一端沿竖直方向均铰接设置在升降主翼上,因此,本发明通过内齿轮配合及曲轴的不同轴的两段输出,不仅使得升降主翼的扑动动作具有极高的仿生度,而且通过成对的力偶输出杆实现对偶力矩的输出,也同时对升降主翼在简谐运动时产生的机械振动进行显著的抵消,从而减少机械噪音及增加了飞行过程中的平稳性,另外齿圈配合使得本发明,内外齿轮啮合传动时机械振动小、精度高,可以保证两个升降主翼同步扑动,及显著提高扑翼飞行过程的平稳性能;并且内外齿轮啮合传动功率范围大,承载能力高,可以保证左右两翼简谐运动有较大的频率波动范围,有利于飞行器高空滑翔、斡旋、平飞等动作的控制,同时也能减少相应驱动能量的消耗。
23.5.因为本发明的力偶输出杆的两端均为弧形,且两端的弧形隆起方向相反,因此,本发明通过两端相反弧形的设置,使得力偶输出杆的两端铰接转动的范围被限制在预定范围内,从而不会因铰接转动失控而影响升降主翼的有效扑动。
24.6.因为本发明的力偶输出杆的数量为两对,与两个升降翼单元一一对应,对应两个升降主翼的较上方的铰接点的不同对的两个力偶输送杆分别铰接设置在第一输出轴段和第二输出轴段上,因此,本发明能够使得两个升降翼单元实现对称的运动,从而进一步地提高了仿生度。
25.7.因为本发明的转向驱动单元包括可摆动设置在基架上的摆动固定子架和均固设在基架上的多个子架驱动组件,转向翼固设在摆动固定子架上,多个子架驱动组件用于在摆动固定子架上的至少两个不同的位置施加控制线性力,从而多个控制线性力驱动摆动固定子架进行空间摆动,进而使得转向翼进行空间摆动,因此,本发明通过简易的线性力驱动实现了转向翼的空间摆动。
附图说明
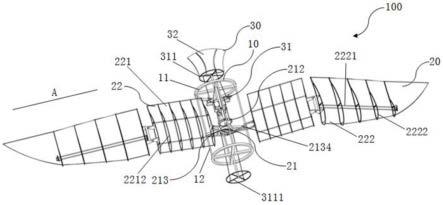
26.图1为本发明的实施例的可变形柔性变形翼飞行器的结构示意图;
27.图2为本发明的实施例的除去升降翼单元的可变形柔性变形翼飞行器的结构示意
图;
28.图3为本发明的实施例的减速组件和力偶输出组件的示意图;
29.图4为本发明的实施例的基架和同步曲轴的示意图;
30.图5为本发明的实施例的力偶输出杆的示意图;
31.图6为本发明的实施例的力偶输出组件的驱动原理机构简图;
32.图7为本发明的实施例的无蒙皮的升降主翼的示意图;
33.图8为本发明的实施例的无蒙皮的可变形子翼的示意图一;
34.图9为本发明的实施例的无蒙皮的可变形子翼的示意图二;
35.图10为本发明的实施例的转向驱动单元的示意图。
36.图中:100、可变形柔性变形翼飞行器,10、基架,11、端面圆架,111、结构辐条,12、周面支杆,13、部件固定杆,14、传动辅助杆,20、升降机构,21、升降驱动单元,211、升降驱动电机,212、减速组件,2121、转矩输入齿轮,2122、双联齿轮,2123、转矩输出齿轮,213、力偶输出组件,2131、同步曲轴,2131a、曲杆固定杆,21311、传动轴段,21312、第一输出轴段,21313、第二输出轴段,2132、传动齿轮,2133、配合内齿圈,2134、力偶输出杆,22、升降翼单元,a、翼展方向,221、升降主翼,221a、驱动连接接头,221b、活动连接接头,2212、主翼翼肋,22121、主翼肋通孔,22122、结构支撑杆,222、可变形子翼,222a、活动配合接头,2221、翼肋扭曲组件,22211、电机支撑杆,22212、扭曲驱动电机,22213、扭曲齿轮对,22214、翼肋联动杆,2222、可变形翼肋,22221、翼肋通孔,22222、孔内联动杆,30、转向机构,31、转向驱动单元,311、摆动固定子架,3111、子架辐条,312、子架驱动组件,3121、子架驱动电机,3122、施力件,3123、联动连接件,32、转向翼,41、位姿传感器。
具体实施方式
37.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实施例结合附图对本发明的一种可变形柔性变形翼飞行器作具体阐述,需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
38.如图1和图2所示,本实施例中的可变形柔性变形翼飞行器100,包括基架10、升降机构20、转向机构30以及控制组件。
39.如图3-图5所示,基架10作为可变形柔性变形翼飞行器100其他部件的安装平台,在本实施例中,基架10呈圆筒状,具有构成端面且内设结构辐条111的两个端面圆架11、用于连接两个端面圆架11的周面支杆12、分别穿设在两个端面圆架11上的两个部件固定杆13以及位于两个端面圆架11之间且固设在端面圆架11上的传动辅助杆14。
40.升降机构20包括升降驱动单元21和相对设置的两个升降翼单元22。
41.升降驱动单元21设置在基架10上,升降翼单元22设置在升降驱动单元21上,并且升降驱动单元21用于驱动两个升降翼单元22相对于基架10同步上下摆动。
42.升降驱动单元21包括升降驱动电机211和力偶输出组件213。
43.升降驱动电机211设置在基架10上,力偶输出组件213的输入端与升降驱动电机211转矩耦合,在本实施例中,升降驱动电机211固设在部件固定杆13上且位于两个端面圆架11之间。
44.在本实施例中,升降驱动单元21还包括用于对升降驱动电机211进行减速增矩的
减速组件212,减速组件212包括转矩输入齿轮2121、双联齿轮2122以及转矩输出齿轮2123。
45.在本实施例中,转矩输入齿轮2121同轴固设在升降驱动电机211的输出轴上,双联齿轮2122中的一个齿轮与转矩输入齿轮2121外啮合配合,转矩输出齿轮2123与双联齿轮2122中的另一个齿轮外啮合配合,并且双联齿轮2122与转矩输出齿轮2123的传动比小于1,双联齿轮2122通过轴承设置在传动辅助杆的端部。
46.在本实施例中,减速组件212设置在基架10的预定位置,从而平衡本实施例的可变形柔性变形翼飞行器100的部件间的质量差,从而使得质量分布均匀化。
47.力偶输出组件213的输出端用于输出沿竖直方向的扑动力偶,扑动力偶用于驱动升降翼单元22中的升降主翼221上下摆动。
48.力偶输出组件213包括同步曲轴2131、传动齿轮2132、配合内齿圈2133以及成对设置的力偶输出杆2134。
49.同步曲轴2131活动设置在基架10上,同步曲轴2131具有传动轴段21311、第一输出轴段21312以及第二输出轴段21313,并且第一输出轴段21312与传动轴段21311、第二输出轴段21313均不同轴,第一输出轴段21312、第二输出轴段21313的所在轴线平行,具体地,在本实施例中,在周面支杆12上固设有位于两个端面圆架11之间的曲杆固定杆2131a,同步曲轴2131通过轴承配合设置在曲杆固定杆2131a上。
50.配合内齿圈2133设置在基架10上,传动齿轮2132套设在传动轴段21311上且与配合内齿圈2133内啮合配合,在本实施例中,配合内齿圈2133固设在周面支杆12且位于两个端面圆架11之间。
51.成对设置的力偶输出杆2134的的数量为两对,且两对力偶输出杆2134分别于两个升降翼单元22的升降主翼221一一对应,成对设置的两个力偶输出杆2134的一端分别铰接设置在第一输出轴段21312和第二输出轴段21313上,另一端沿竖直方向均铰接设置在升降翼单元22的升降主翼221上。
52.具体地,对应两个升降主翼221的较上方的铰接点的不同对的两个力偶输送杆2134分别铰接设置在第一输出轴段21312和第二输出轴段21313上。
53.如图6所示,以上述设置方式设置的两对力偶输出杆2134在持续运动时,靠近升降主翼221的一对力偶输出杆2134的位置关系为交叉,而远离升降主翼221的一对力偶输出杆2134的位置关系为不交叉,不交叉的位置关系使得该对力偶输出杆2134对配合内齿圈2133的轴线和升降主翼221的耦合长度相较于交叉的位置关系更短,从而巧妙地保证了两个升降主翼221关于配合内齿圈2133的轴线的对称性。
54.力偶输出杆2134的两端均为弧形,且两端的弧形隆起方向相反,具体地,力偶输出杆呈“s”型,两端的弧度分别为1.127和1.223,当同步曲轴旋转时,力偶输出杆的摆动幅度为0-26
°
。
55.如图7-图9所示,升降翼单元22包括相互活动连接的升降主翼221和可变形子翼222,升降主翼221和可形子翼222具有相同的相同翼展方向a。
56.具体地,升降主翼221由相互刚性连接且平行的多个主翼翼肋2212覆盖蒙皮(附图中未示出)构成,在本实施例中,蒙皮的材质优选聚酰亚胺薄膜。
57.具体地,位于升降主翼221的两端的两个主翼翼肋2212分别设置有竖直设置的驱动连接接头221a和水平设置的活动连接接头221b,驱动连接接头221a用于连接力偶输出杆
2134,活动连接接头221b用于连接可变形子翼222。
58.具体地,主翼翼肋2212具有用于减轻结构质量的主翼肋通孔22121和用于加强主翼翼肋2212的结构强度的结构支撑杆22122,在本实施例中,所有主翼翼肋2212相同,并且升降主翼221的截面处处相同,在扑动力偶的作用下,升降主翼221形成频率为5hz的上下扑动的简谐运动,且扑动角度为30
°
。
59.可变形子翼222包括翼肋扭曲组件2221和可变形翼肋2222。
60.具体地,可变形翼肋2222的数量为多个且沿翼展方向a均匀分布,位于可变形子翼222靠近升降主翼221的端部的可变形翼肋2222上水平设置有活动配合接头222a,且活动配合接头222a与活动连接接头221b通过连接扭簧(附图中未示出)可复位的铰接,可变形翼肋2222多个可变形翼肋2222覆盖蒙皮(附图中未示出)。
61.可变形翼肋2222具有翼肋通孔22221,翼肋通孔22221内设置有孔内联动杆22222,在本实施例中,可变形翼肋2222的数量大于等于5个,可变形翼肋2222的材质优选碳纤维杆或者聚丙烯腈纤维(pan),多个可变形翼肋2222朝向可变形子翼222的自由端依次减小,并且可变形子翼222的一端为可变形翼肋2222,另外一端由最小的可变形翼肋2222通过蒙皮延伸并逐渐收拢于一点,从而可变形子翼222的整体形状呈三角状。
62.翼肋扭曲组件2221包括电机支撑杆22211、扭曲驱动电机22212、扭曲齿轮对22213以及翼肋联动杆22214。
63.扭曲驱动电机22212通过电机支撑杆22211固设在可变形子翼222的一端,翼肋联动杆22214沿翼展方向a延伸且穿设在至少两个孔内联动杆22222上,具体地,电机支撑杆22211固定在活动配合接头222a上,在本实施例中,翼肋联动杆22214穿过所有的孔内联动杆22222,即穿接所有的可变形翼肋2222。
64.扭曲齿轮对22213的输入端与扭曲驱动电机22212的输出端转速耦合,翼肋联动杆22214与扭曲齿轮对22213的输出端转速耦合,在本实施例中,扭曲齿轮对22213的输入端和输出端为相互外啮合的齿轮。
65.翼肋扭曲组件2221用于驱动孔内联动杆22222相对升降主翼221进行上下摆动,从而可变形子翼222产生攻角变化,具体地,当扭曲驱动电机22212转动时,通过扭曲齿轮对22213的输出端沿位置始终静止的扭曲齿轮对22213的输入端进行圆周运动,从而通过翼肋联动杆22214带动弹性材质的可变形翼肋2222相对于升降主翼221上下摆动,从而使得在可变形子翼222以设置有活动配合接头222a的一端作为固定端,其余可变形翼肋2222相对于该固定端的可变形翼肋2222进行扭曲变形,形成攻角的在-0.5
°
至0.5
°
间进行变化。
66.转向机构30包括转向驱动单元31和转向翼32。
67.转向驱动单元31设置在基架10上,转向翼32设置在转向驱动单元31上,并且转向驱动单元31用于驱动转向翼32相对于基架10摆动。
68.如图10所示,转向驱动单元31包括可摆动设置在基架10上的摆动固定子架311和均固设在基架10上的多个子架驱动组件312,在本实施例中,摆动固定子架311呈圆环状,内部具有子架辐条3111,摆动固定子架311通过三球销式万向节与部件固定杆13的端部连接,且摆动固定子架311位于两个端面圆架11的外侧且与端面圆架11的初始位置关系为平行。
69.转向翼32固设在摆动固定子架31上,在本实施例中,转向翼32与部件固定杆13分别固设于摆动固定子架31的相对两面上。
70.多个子架驱动组件312用于在摆动固定子架31上的至少两个不同的位置施加控制线性力,从而多个控制线性力驱动摆动固定子架31进行空间摆动,进而使得转向翼32进行空间摆动。
71.子架驱动组件312包括子架驱动电机3121、施力件3122以及联动连接件3123。
72.具体地,子架驱动电机3121设置基架10上,施力件3122设置在子架驱动电机3121的输出端上,联动连接件3123的两端分别设置在摆动固定子架311上和施力件3122上,从而施力件3122与子架驱动电机3121的输出端构成曲柄机构,并且联动连接件3123为柔性或者刚性连接件,在本实施例中,施力件3122呈四叶草形,联动连接件3123连接在其中一叶的末梢,四叶草形不仅使得施力件3122在不受力状态下的重心始终恒定,从而便于整体机构的重心的控制,也便于协调机构各部件的布置;而且可在四个叶上均设置固定点,以便能够便利地在任意一叶上进行联动连接件3123的固定,从而便于后续做消融实验,对转向翼32的控制方式做升级优化。
73.控制组件包括位姿传感器41和上位机(附图中未示出)。
74.位姿传感器41设置在升降驱动电机211上,位姿传感器41用于采集基架10相对于水平面的角度值,并作为水平夹角值,上位机根据水平夹角值控制扭曲驱动电机22212的转向和/或转速。
75.以下结合实施例对可变形柔性变形翼飞行器100的飞行状态与相应的上位机控制进行说明:
76.操作人员对可变形柔性变形翼飞行器100的驱动指令类型包括:上升指令、下降指令以及转向指令;
77.可变形柔性变形翼飞行器100在驱动指令下的飞行状态分为:上升状态、下降状态以及转向状态,并且转向状态只能在上升或者下降状态时出现;
78.位姿传感器41在上述飞行状态下对水平夹角值进行采集并传给上位机,上位机根据位姿传感器41采集的水平夹角值的正负,将该水平夹角值对应识别为上升信号或下降信号;
79.上位机对应上述信号的自控制包括:根据上升信号和下降信号空控制扭曲驱动电机22212的转向和/或转速,以使得可变形子翼222进行与相接触气流相迎或相背相适应的攻角变化。
80.上述实施方式为本发明的优选案例,并不用来限制本发明的保护范围,本领域普通技术人员在所附权利要求范围内不需要创造性劳动就能做出的各种变形或修改仍属本专利的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。