1.本发明属于车载噪声控制领域,涉及车辆主动降噪领域,具体是一种针对宽带噪声的车辆降噪方法及设备、存储介质。
背景技术:
2.随着现代工业的发展,噪声污染问题越来越多的引起人们的关注,高强度的噪声信号也影响了听音者的舒适度。由于声掩蔽的效应,需要增加音量才能得到更高的信噪比得到清晰的听音效果。这样带来的长时间持续的高声压将会给听力带来不可恢复的损伤。随着车辆智能化的提高,驾乘人员对车内声学环境的要求愈发严格。车内噪声会降低驾乘人员的舒适性,引起车内乘员的烦躁,疲劳;也会影响交流通话的清晰度,甚至影响驾驶对车外信号声的感知,增加交通隐患。汽车nvh(noise,vibration,harshness)是车厂关心的重要问题。通过修改结构设计,增加阻尼材料或者使用减震弹簧等装置来降低噪声,统称为被动噪声控制;这种方法对中高频的噪声有比较好的降噪效果。但是这种方法对低频效果比较差,特别是路面和轮胎碰撞摩擦带来的路噪,往往集中在低频。此外,被动噪声控制需要较长的调教时间,而且难以控制成本。主动降噪的方案利用车载音频系统,筹建噪声信号的反信号,形成次级声波,抵消目标区域内的噪声,降低噪声污染,提高主观听音舒适度,但是几乎不会给汽车增加额外的配重,有助于降低尾气排放,是一种绿色的节能的解决方案。
3.fxlms(filtered-x least mean square)算法是主动噪声控制中常用的算法,因为其计算资源的消耗较小,算法鲁棒性较好,所以应用比较广泛。但是fxlms算法存在收敛较慢的问题,但是fxlms算法存在收敛较慢的问题,可以引入归一化的因子,也叫做nfxlms(normalized filtered-x least mean square)算法或者叫fxnlms。虽然也有专利(例如us10789932b2)提及到归一化的fxlms算法,当时算法的有关归一化的计算,仅仅对每个参考信号自身的能量进行了估计,没有考虑到次级通道传递函数的影响。此外,nfxlms算法往往是单通道(siso,single input single output)的算法。针对路噪的控制需要多通道的算法(mimo,multiple inputs multiple outputs),然而”a diffusion strategy for the multichannel active noise control system in distributed network》”,ju-man song,2016以及”multichannel feedforward active noise control system with optimal reference microphone selector based on time difference of arrival”,kenta iwai,2018等文章中介绍的多通道的nfxlms算法中,均是在时域进行的,尤其是多通道的情况,计算资源比较大。
技术实现要素:
4.本发明的目的是提供一种基于时频域的车辆路噪控制方法及设备,其能够针对车辆轮胎与路面摩擦带来的路噪进行主动降噪,降低车内噪声污染并具有较快的收敛速度,同时所需的计算资源较少,计算较为准确。
5.本发明的还提供一种计算机可读存储介质,其存储有能够实现上述车辆路噪控制
方法的程序。
6.根据本发明的第一个方面,一种针对宽带噪声的车辆降噪方法,包括如下步骤:
7.对每个采样时刻采集车辆路噪的j通道参考信号,记作xj(n),j=1,2,
…
,j,j为参考信号的通道数,n表示采样时刻;
8.根据当前时刻的滤波器控制系数和所述多通道参考信号生成控制信号,馈给车辆的对应需要降噪区域的声重放装置;
9.采集需要降噪区域的每个采样时刻的残余噪声信号,记作误差信号em(n),m=1,2,
…
,m;
10.其特征在于,所述车辆路噪控制方法还包括:若所述参考信号和所述误差信号的数据累计分别达n个,则执行频域计算步骤,所述频域计算步骤包括:
11.s101、生成频域的参考信号xj,其中xj=[xj(0),xj(1),
…
xj(2n-1)]
t
,xj(0)、xj(1)、xj(2n-1)分别表示第1个、第2个、第2n个分析频率上相应的参考信号的特征;
[0012]
s102、生成频域的误差信号em,其中em=[em(0),em(1),
…em
(2n-1)]
t
,em(0)、em(1)、em(2n-1)分别表示第1个、第2个、第2n个分析频率上相应的误差信号的特征;
[0013]
s103、产生频域滤波后的参考信号如下式表示
[0014][0015]
其中,s
l,m
=[s
l,m
(0),s
l,m
(1),
…sl,m
(2n-1)]
t
,l=1,2,
…
,l;m=1,2,
…
,m,s
l,m
表示第l个扬声器到第m个残余噪声信号采集装置之间的传递函数,m是残余噪声信号采集装置的个数;
[0016]
s104、将频域滤波后的参考信号变换到时域,截取前n个点,记为s104、将频域滤波后的参考信号变换到时域,截取前n个点,记为
[0017]
其中,分别表示第1个、第2个、第n个采样时间点上的滤波参考信号;
[0018]
s105、重新变换得到频域的滤波参考信号
[0019]
s106、对每一个频点,将滤波参考信号构造为如下的二维矩阵u(k),
[0020][0021]
其中,表示第j个参考信号经过第l个扬声器到到第m个麦克风之间传递函数滤波后的信号的频域值,∈rj·
l
×m表示一个jl行,m列的矩阵;
[0022]
s107、对每一个频点,生成频域的梯度向量,如下式所示,
[0023]
φ(k)=μ
·
conj(u(k))[u
t
(k)u(k) δi]-1
•
err(k)∈rj·
l
×1k=0,1,
…
,2n-1;
[0024]
其中,err(k)=[e1(k),e2(k),
…em
(k)]
t
:conj(
•
)表示取其共轭;μ是收敛因子;δ是正则化因子;i是单位矩阵;
[0025]
φ(k)的元素构成定义为φ(k)=[ψ
1,1
(k),ψ
1,2
(k),
…
ψ
j,l
(k)]
t
;从每一个通道的梯度增量,表示为ψ
j,l
=[ψ
j,l
(0),ψ
j,l
(1),
…
ψ
j,l
(k)
…
ψ
j,l
(2n-1)]
t
;
[0026]
s108、根据所述频域的梯度向量ψ
j,l
生成时域的梯度向量,将频域的数值变换到
时域后,截取前n个点,即为
[0027]
s109、根据重新生成频域的梯度向量ψ
j,l
;
[0028]
s110、根据下式更新频域的滤波器控制参数w
j,l,new
,
[0029]wj,l,new
=w
j,l,old
ψ
j,l
[0030]
其中,w
j,l,old
、w
j,l,new
分别为更新前、后的频域的滤波器控制参数;
[0031]
s111、根据频域的滤波器控制参数w
j,l,new
变换得到时域的滤波器控制系数w
j,l
。
[0032]
在一优选的实施例中,步骤s101中,通过下式生成频域的参考信号,
[0033][0034]
其中,fft表示傅里叶变换,xj(n)=[xj(n-n 1),
…
,xj(n-1),xj(n)]
t
,xj(n n)表示n n采样时刻及此前的n个时间采样时刻的参考信号的数值。
[0035]
在一优选的实施例中,步骤s102中,通过下式生成频率的误差信号,
[0036][0037]
其中,em(n)=[em(n-n 1),
…
,em(n-1),em(n)]
t
。
[0038]
在一优选的实施例中,步骤s104中,通过下式将频率滤波后的参考信号变换到时域,
[0039][0040]
l=1,2,
…
,l;m=1,2,
…
,m。
[0041]
在一优选的实施例中,步骤s105中,根据下式重新变换得到频率的滤波参考信号如下式表示
[0042][0043]
其中,表示滤波后的参考信号变换到时域采样点组成的向量,其长度为n,初始采样时刻是n。
[0044]
在一优选的实施例中,步骤s108中,根据下式生成时域的梯度向量,
[0045][0046]
步骤s109中,根据下式重新生成频域的梯度向量,
[0047][0048]
在一优选的实施例中,步骤s110中,根据下式得到时域的滤波器控制参数w
j,l
,
[0049]wj,l
=g
·
ifft[w
j,l,new
]j=1,2,
…
,j;l=1,2,
…
,l;
[0050]
其中,w
j,l
=[w
j,l
(1),w
j,l
(2),
…wj,l
(n)]
t
。
[0051]
在一优选的实施例中,根据下式生成馈给声重放单元的控制信号y
l
(n),
[0052][0053]
其中,w
j,l
(i)表示输入是第j个参考信号且输出对应的是第l个声重放装置的当前
时刻的滤波器的控制系数。
[0054]
在一优选的实施例中,所述频域计算步骤在n个采样时间点的时间段内执行,若参考信号和误差信号的数据达到n个,则计数器清零,则将通过频域计算步骤将频域得到的滤波器参数更新到时域中,开始新一轮的频域计算;如果没有,则继续采集车辆路噪和误差信号,计数器继续累加。
[0055]
在一优选的实施例中,通过振动传感器采集车轮和路面摩擦产生的震动信号作为所述参考信号。
[0056]
更优选地,所述振动传感器设置于车辆的底板上。
[0057]
在一优选的实施例中,通过第一麦克风采集车轮和路面摩擦产生的噪声信号作为所述参考信号。
[0058]
更优选地,所述第一麦克风设置在车辆的邻近车轮的部位上。
[0059]
在一优选的实施例中,所述声重放装置包括设于车辆的车厢内的车载扬声器。该车载扬声器布放在车辆的车厢内或至少向车辆的车厢辐射声音,包括但不限于:头枕扬声器、顶棚扬声器、门板扬声器等。
[0060]
在一优选的实施例中,所述误差信号采集装置包括多个第二麦克风,通过多个第二麦克风采集车辆车厢内的声信号,所述多个第二麦克风布放在车辆车厢内的多个采样位置。
[0061]
根据本发明的第二个方面,一种基于主动降噪的车辆路噪控制设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述的车辆路噪控制方法;所述车辆路噪控制设备还包括用于采集车轮与路面摩擦引起的噪声或振动信号的路噪采集装置、用于根据所述控制装置发送的控制信号在车厢内形成用于抵消噪声的次级声波的声重放装置及用于采集车厢多个位置的参与噪声信号的误差信号采集装置。
[0062]
在一优选的实施例中,所述路噪采集装置包括设置于车辆的底板上的振动传感器或设置在车辆的邻近车轮的部位上的第一麦克风。
[0063]
在一优选的实施例中,所述声重放装置包括车载扬声器。该车载扬声器布放在车辆的车厢内或至少向车辆的车厢辐射声音,包括但不限于:头枕扬声器、顶棚扬声器、门板扬声器等
[0064]
根据本发明的第三个方面,一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,该程序被处理器执行时实现如上所述的车辆路噪控制方法。
[0065]
本发明采用以上方案,相比现有技术具有如下优点:
[0066]
本发明的车辆降噪方法及设备,针对由于轮胎与路面摩擦引起的路噪等宽带噪声,采用改进的时频域的多通道fxnlms(time frequency domain multiple inputs multiple outputs filtered-x normalized least mean square)算法,每n个采样时间点的时间内计算频域得到的滤波器参数并更新到时域中,相比时域的多通道nfxlms算法计算资源少,比传统的时频域的fxlms算法收敛速度更快,考虑了通道之前的耦合效应,计算更准确,获得了较好的降噪性能。
附图说明
[0067]
为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0068]
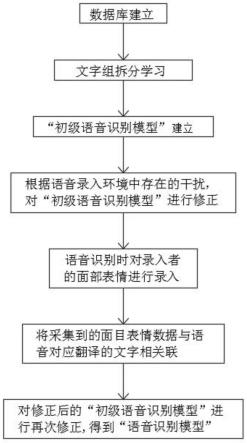
图1为根据本发明实施例的时频域的多通道fxnlms算法时域部分的流程图。
[0069]
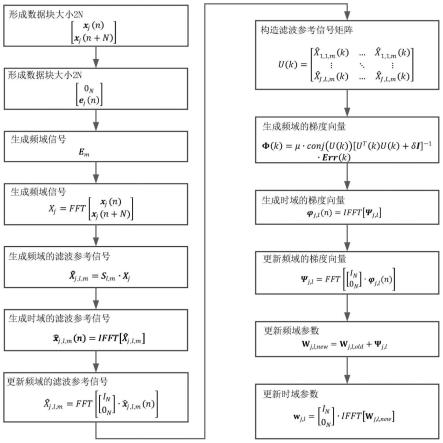
图2为根据本发明实施例的时频域的多通道fxnlms算法频域部分的流程图。
[0070]
图3为本发明实施例的时频域的多通道fxnlms算法的框图。
[0071]
图4为传统的多通道fxlms算法与本实施的多通道fxnlms算法在位置1处的降噪性能对比图。
[0072]
图5为传统的多通道fxlms算法与本实施的多通道fxnlms算法在位置5处的降噪性能对比图。
具体实施方式
[0073]
下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域的技术人员理解。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
[0074]
本实施例提供一种基于主动降噪的车辆降噪方法,其针对由车辆轮胎和路面摩擦引起的路噪采用时频域的多通道fxnlms算法(记作,tfd mimo nfxlms,time frequency domain multiple inputs multiple outputs filtered-x normalized least mean square)。该算法包括两部分,一部分是时域计算,另一部分是频域计算。结合图1至图3所示,该方法具体阐述如下。
[0075]
图1是算法的时域计算步骤。计算在每个采样时间点执行。
[0076]
s201、参考信号采集:在每一个采样时刻n,从传感器中采集参考信号,例如从振动传感器采集车厢底板的振动信号,或者通过设置于车轮附近的麦克风采集声信号等,将振动信号或该声信号作为降噪对象(轮胎与路面摩擦引起的噪声)的参考信号。共有j通道参考信号,记作xj(n),j=1,2,
…
,j。
[0077]
s202、误差信号采集:在每一个采样时刻n,从布置于车厢内的麦克风采集目标区域(例如,车厢内)的残余噪声信号。共有m个麦克风信号,记作em(n),m=1,2,
…
,m。
[0078]
s203、控制信号产生:根据当前时刻的滤波器控制系数w
j,l
(n)和上一步骤得到的参考信号,生成控制信号y
l
(n),馈给车厢内的车载扬声器等声重放单元,
[0079][0080]
其中扬声器通道数为l,自适应滤波器的阶数是n。w
j,l
(i)表示输入是第j个参考信号,输出对应第l个控制声源(车载扬声器)的滤波器的当前时刻的控制系数。
[0081]
判断参考信号和误差信号的数据累计是否有n个。如果有,计数器清零,将频域得到的滤波器系数更新到时域中,并且开始新一轮的频域计算;如果没有,计数器继续累加,继续上述步骤s201至s203。
[0082]
图2是算法的频域计算步骤。计算在n个采样时间点的时间段内执行。
[0083]
s101、生成频域的参考信号。根据overlap-save方法,对每个通道的参考信号的2n个数据进行fft运算,具体表示为
[0084][0085]
其中,xj(n)=[xj(n-n 1),
…
,xj(n-1),xj(n)]
t
;xj=[xj(0),xj(1),
…
xj(2n-1)]
t
。
[0086]
s102、生成频域的误差信号。根据overlap-save方法,对每个通道的误差信号补零后进行fft计算,具体表示为
[0087][0088]
其中,em(n)=[em(n-n 1),
…
,em(n-1),em(n)]
t
;em=[em(0),em(1),
…em
(2n-1)]
t
。
[0089]
s103、产生滤波后的参考信号。fxnlms算法中重要的一步就是对参考信号进行滤波。一般认为次级通道的传递函数,包括了数字控制信号y(n)经过dac模块,模拟滤波器,功放模块,车载扬声器,声波的空间传播,麦克风,模拟滤波器,adc模块的传递路径的。次级通道的传递函数s通过在线和离线的系统辨识方法进行得到。是一个长度为n的数字滤波器。我们这里考虑其频域的形式表示为s
l,m
=[s
l,m
(0),s
l,m
(1),
…sl,m
(2n-1)]
t
,l=1,2,
…
,l;m=1,2,
…
,m,表示第l个扬声器到第m个麦克风之间的传递函数。m是麦克风的个数。计算得到滤波后的参考信号为
[0090][0091]
k=0,1,
…
,2n-1;j=1,2,
…
,j;
[0092]
l=1,2,
…
,l;m=1,2,
…
,m。
[0093]
其中,k表示第k个频点,因为fft的长度是2n,所以有2n个频点;ft的长度是2n,所以有2n个频点;
[0094]
s104、将频域滤波后的参考信号变换到时域,截取前n个点
[0095][0096]
k=0,1,
…
,2n-1;j=1,2,
…
,j;
[0097]
l=1,2,
…
,l;m=1,2,
…
,m
[0098]
其中
[0099]
s105、重新变换得到频域的滤波参考信号
[0100][0101]
j=1,2,
…
,j;l=1,2,
…
,l;m=1,2,
…
,m。
[0102]
s106、对每一个频点,将滤波参考信号构造二维矩阵
[0103][0104]
其中,∈rj·
l
×m表示一个jl行,m列的矩阵;
[0105]
s107、对每一个频点,生成频域的梯度向量,
[0106]
φ(k)=μ
·
conj(u(k))[u
t
(k)u(k) δi]-1
·
err(k)∈rj·
l
×1[0107]
k=0,1,
…
,2n-1;
[0108]
其中,err(k)=[e1(k),e2(k),
…em
(k)]
t
;conj(
·
)表示取其共轭;μ是收敛因子,是一个常数,其取值通常在0-2之间;δ是正则化因子,是一个接近于0的小数;i是单位矩阵。该表达式归一化lms算法的表达式,只是这里拓展到多通道中,并且考虑了通道之间的耦合效应。注意φ(k)的元素构成定义为φ(k)=[ψ
1,1
(k),ψ
1,2
(k),
…
ψ
j,l
(k)]
t
;同时,从每一个通道的梯度增量,表示为ψ
j,l
=[ψ
j,l
(0),ψ
j,l
(1),
…
ψ
j,l
(k)
…
ψ
j,l
(2n-1)]
t
;通过从频域的角度和从通道数的角度对元素进行了重组。
[0109]
s108、生成时域的梯度向量,将频域的数值变换到时域后,截取前n个点,
[0110][0111]
其中,
[0112]
s109、重新生成频域的梯度向量
[0113][0114]
s110、更新频域的滤波器控制参数
[0115]wj,l,new
=w
j,l,old
ψ
j,l j=1,2,
…
,j;l=1,2,
…
,l;
[0116]
其中,w
j,l
=[w
j,l
(0),w
j,l
(1),
…wj,l
(2n-1)]
t
。
[0117]
s111、变换得到时域的滤波器控制参数,截取前n个点
[0118]wj,l
=g
·
ifft[w
j,l,new
]j=1,2,
…
,j;l=1,2,
…
,l;
[0119]
其中,w
j,l
=[w
j,l
(1),w
j,l
(2),
…wj,l
(n)]
t
。
[0120]
仿真例
[0121]
对算法的收敛性能进行了仿真。在仿真实验中,目标噪声是一个宽带信号,频带覆盖80hz-320hz,这是路噪的典型频段分布。噪声信号是白噪声信号经过一个带通滤波器产生。设置参考信号的通道数k=2,设置车载扬声器的个数l=5,设置车厢内的误差信号采集麦克风的个数m=5。扬声器和麦克风之间的传递函数,也是上述的次级通道的传递函数是在实车采集得到。在仿真实验中,分别对比了主动噪声控制前后的噪声能量随迭代次数(也对应着时间)的变化关系,更主要的是对比了传统的多通道的fxlms算法、本实施例提出的多通道的时频域fxnlms算法。图4给出了第一个位置处的残留噪声信号幅度随迭代的变化关系,从图中可以看到,传统的fxlms算法有一定的降噪效果;采用本实施例fxnlms算法,算法收敛更快,最终的降噪量差不多。图5给出了第五个位置处的残留噪声信号幅度随迭代变化额关系,从图中可以看到,传统的fxlms算法几乎没有降噪效果;采用本实施例的fxnlms算法,有了明显的降噪效果,收敛速度快,降噪量较大。
[0122]
本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本技术的说明书中使用的措辞“包括”是指存在特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。
[0123]
上述实施例只为说明本发明的技术构思及特点,是一种优选的实施例,其目的在于熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限定本发明的保护
范围。凡根据本发明的精神实质所作的等效变换或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。