1.本发明涉及轨道缺陷检测技术领域,具体公开了一种单轨吊轨道缺陷检测方法。
背景技术:
2.煤矿井下机电运输是矿井生产环节的重要组成部分,它贯穿了矿井的各个生产环节,目前巷道运输多使用轨道提升运输方式,随着煤矿巷道辅助运输的不断发展,单轨吊因其利用率高、维护方便费用低,可在各种竖曲线、平曲线及复杂曲线运行以及能直接到达采掘工作面等优点而被广泛使用,但由于轨道采用悬挂方式固定,且大负载的单轨吊车运行中易造成机身摇摆,对轨道造成多频次、大动量冲击,容易引起吊轨出现接头错位、轨道变形等缺陷,导致单轨吊的安全可靠性大大降低,因而单轨吊的健康状况将直接决定着每一位生产工作人员的生命财产安全,然而现有的人工巡检不仅对巡检人员安全没有保障,而且巡检人员的主观判断以及低效率也是一大问题,由于单轨吊发展历史短,矿井巷道条件恶劣等因素,目前还未有高效可靠的缺陷检测方法,设计一款能够代替人工巡检进行高效自动巡检的单轨吊自然状态参数检测方法迫在眉睫,且有着较高的实际应用价值。
技术实现要素:
3.有鉴于此,针对煤矿井下机电运输系统中单轨吊轨道的接头错位、轨道变形等问题,提供一种单轨吊轨道缺陷检测方法。
4.为了实现上述目的,本发明采用了如下的技术方案:
5.一种单轨吊轨道缺陷巡检方法,采用的硬件主要有超声波传感器、rfid模块、wi-fi信号传输模块、图像采集模块;
6.所述的超声波传感器,布置在所设计巡检装置前端,其纵向超声波传感器正对于单轨吊轨道槽底部,以检测单轨吊纵向错位,横向超声波传感器正对于单轨吊轨道槽侧面,以检测单轨吊轨道接头横向错位;
7.所述的图像采集模块主要由防爆红外摄像机构成,摄像机底座通过螺栓固定在巡检装置壳体下方,摄像头与摄像机底座铰接,可以在一定角度内转动,正对于单轨吊轨道底部,以采集轨道底部走向信息;
8.所述rfid模块,其读卡器通过螺栓固定在巡检装置外壳前侧,其标签策略性的布置在单轨吊轨道底部;
9.所述wi-fi传输模块,其天线固定在巡检装置外壳侧边,并通过信号转换器与传感器连接;
10.所述单轨吊轨道缺陷巡检方法总体包括如下步骤:
11.第一步,数据统计及周期性巡检:将防爆红外摄像机采集到的图像信息、超声波传感器、加速度传感器和rfid读卡器在运行过程中采集到的数据作为原始数据进行处理并根据处理结果进行缺陷位置精确定位以及图像反馈;
12.第二步,传感器数据处理与分析:通过wi-fi模块将各个传感器采集到的数据传输
到上位机,通过所述的数据处理方法对原始数据进行处理分析,从而求解出缺陷异常值;
13.第三步,累加对比,缺陷定位:将各传感器检测到的数据经过处理后结合缺陷位置在上位机进行描述,完成可视化检测。
14.特别地,在步骤“传感器数据处理与分析”中,采用单轨吊轨道接头错位检测方法,对安装后的超声波传感器进行初始化操作,使得传感器获得数据为轨道偏移数据,将数据进行绘图处理,根据试验结果分析,平滑部分为传感器随巡检装置随动造成的数据变化,图像激变点为轨道接头错位导致的数据异动,根据检测函数刷选后匹配位置数据,最终得到错位数据。
15.特别地,在步骤“传感器数据处理与分析”中,采用单轨吊轨道直线度检测图像处理,具体包括以下步骤:
16.对轨道图像进行灰度化和中值滤波处理,利用逆透视变换得到轨道线互相平行的俯视图,设置感兴趣区域减少干扰,使用直方图均衡化进行图像增强,降低亮度变化带来的影响;
17.选用canny算子进行边缘检测,使用hough变换检测边缘图中的直线,针对轨道图像特点,通过对极角进行约束,减少hough变换的计算量;
18.采用一种基于主动投票法的轨道线检测算法,其主动表现在每一根直线都被假设成轨道线,将自身特点属性作为轨道线标准来对其他直线进行投票,根据总票数筛选出轨道线;
19.在轨道线拟合稳定后,利用卡尔曼滤波进行轨道线跟踪,将提取出来的轨道边缘直线与理想直线进行拟合计算,求解出直线度,从而得到单轨吊轨道变形情况。
20.特别地,在步骤“累加对比,缺陷定位”中,采用缺陷定位方法,其特征在于,首先结合井下巷道定位系统,根据单轨吊轨道实际工况进行分区段标识,便于根据标识规则快速定位缺陷所在位置。
21.特别地,在步骤“累加对比,缺陷定位”中,采用缺陷定位方法,还包括将包含位置信息的rfid标签策略性的布置在轨道底部,当巡检机器人到达相应位置时,读卡器模块感应并读取标签后将位置信息通过wi-fi模块发送至上位机,从而实现缺陷定位与显示功能。
22.本发明具有以下技术效果:
23.借助单轨吊车作为动力在轨道上移动,携带超声波传感器、rfid模块、wi-fi信号传输模块、图像采集模块等;开发轨道参数识别检测系统,可对轨道参数(y向、z向错位、直线度)进行检测、并对缺陷进行定位;设计可实时显示轨道视频信息及检测结果的上位机交互界面。实现轨道错位缺陷及直线度的自主检测,方便工作人员掌握运输系统的安全状态,对于提高矿业企业智能化作业能力、对减少人员和财产损失有着重要的研究价值。
24.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
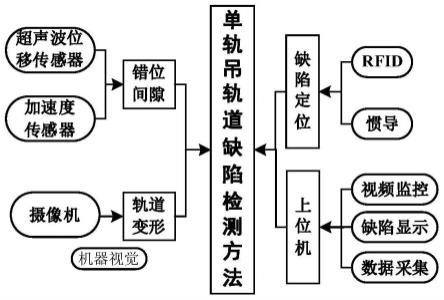
25.图1为本发明单轨吊缺陷检测方法总体示意图;
26.图2为本发明单轨吊缺陷检测方法定位标识示意图;
27.图3为本发明单轨吊缺陷检测方法数据处理方法流程图;
28.图4为本发明单轨吊缺陷检测方法直线度提取算法示意图;
29.图5为本发明单轨吊缺陷检测方法上位机界面示意图。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
32.如图1-5所示,本发明所述的一种单轨吊轨道缺陷巡检方法,具体包括以下步骤:
33.第一步,数据统计及周期性巡检:将相机采集到的数据图像、超声波传感器、加速度传感器和rfid读卡器在巡检装置整个运行过程中采集到的数据作为原始数据进行处理并根据处理结果进行缺陷位置精确定位以及图像反馈。
34.第二步,传感器数据处理与分析:将统计后的数据进行处理,其具体处理过程如下:
35.单轨吊轨道接头错位检测方法部分,对安装后的超声波传感器进行初始化操作,使得传感器获得数据为轨道偏移数据,将数据进行绘图处理,根据试验结果分析,平滑部分为传感器随巡检装置随动造成的数据变化,图像激变点为轨道接头错位导致的数据异动,根据检测函数刷选后匹配位置数据,最终得到错位数据。
36.单轨吊轨道直线度检测图像处理部分,首先,对轨道图像进行灰度化和中值滤波处理,利用逆透视变换得到轨道线互相平行的俯视图,设置感兴趣区域减少干扰,使用直方图均衡化进行图像增强,降低亮度变化带来的影响。分析不同的边缘检测算子,分别从原理和实际应用效果对比,确定选用canny算子进行边缘检测。使用hough变换检测边缘图中的直线,针对轨道图像特点,通过对极角进行约束,极大程度减少了hough变换的计算量。提出了一种基于主动投票法的轨道线检测算法,其主动表现在每一根直线都被假设成轨道线,将自身特点属性作为轨道线标准来对其他直线进行投票,根据总票数筛选出轨道线。在轨道线拟合稳定后,利用卡尔曼滤波进行轨道线跟踪,进一步缩小感兴趣区域,降低计算量,提高了算法的实时性,拟合出的轨道线也更加精确,进一步的将提取出来的轨道边缘直线与理想直线进行拟合计算,求解出直线度,从而得到单轨吊轨道变形情况。
37.第三步,累加对比,缺陷定位:通过rfid模块获取各目标检测点的位置,通过wi-fi模块上传至上位机上进行描述,结合其他传感器数据完成可视化检测。
38.采用缺陷定位方法,其特征在于,首先结合井下巷道定位系统,根据单轨吊轨道实际工况进行分区段标识,如图2所示,将轨道划分为n段,每段包含4根轨道,则12-4表示为第12段第4根轨道,便于工作人员根据标识规则快速定位缺陷所在位置,进一步的,具体操作方法,将包含位置信息的rfid标签策略性的布置在轨道底部,当巡检机器人到达相应位置时,读卡器模块感应并读取标签后将位置信息通过wi-fi模块发送至上位机,从而实现缺陷
定位与显示功能。
39.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和本发明的实用性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
