技术特征:
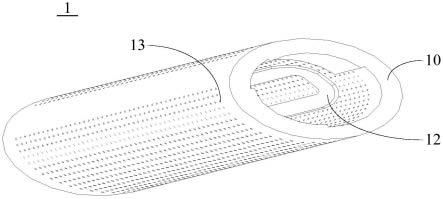
1.一种基于激光雷达的磁浮列车测速定位方法,其特征在于,所述方法具体包括:接收激光雷达传感器检测到的参考点数据,分析参考点数据得出列车运行的累计距离和当前运行速度值;接收激光雷达传感器获取的定位辅助物的识别信息,根据定位辅助物的识别信息确定列车当前所处位置;不同定位辅助物安装在列车运行轨迹不同位置处,将每个定位辅助物的识别信息与精确的地理位置信息对应保存。2.根据权利要求1所述的基于激光雷达的磁浮列车测速定位方法,其特征在于,所述接收激光雷达传感器检测到的参考点数据,分析参考点数据得出列车运行的累计距离和当前运行速度值具体包括:接收激光雷达传感器周期性检测到的参考点数据;根据当前周期接收的参考点数据,识别参考点距离激光雷达传感器的当前水平距离值;将当前水平距离值结合上一周期识别的前次水平距离值进行分析比较,得到列车运行的累计距离和当前运行速度值。3.根据权利要求2所述的基于激光雷达的磁浮列车测速定位方法,其特征在于,所述根据当前周期接收的参考点数据,识别参考点距离激光雷达传感器的当前水平距离值具体包括:在当前周期接收的参考点数据中,识别出每次扫描的参考点以及参考点距离激光雷达传感器的直线距离值;根据识别出的参考点,确定参考点对应的激光雷达传感器的扫描角度;根据扫描角度和直线距离值得到参考点距离激光雷达传感器的当前水平距离值。4.根据权利要求2所述的基于激光雷达的磁浮列车测速定位方法,其特征在于,所述将当前水平距离值结合上一周期识别的前次水平距离值进行分析比较,得到列车运行的累计距离和当前运行速度值具体包括:将当前水平距离值与上一周期识别的前次水平距离值之间的距离差值的绝对值除以两周期之间的时间差值,计算出列车当前运行速度值;通过累计每次计算得出的距离差值的绝对值,计算出列车运行的累计距离。5.根据权利要求2所述的基于激光雷达的磁浮列车测速定位方法,其特征在于,所述将当前水平距离值结合上一周期识别的前次水平距离值进行分析比较,得到列车运行的累计距离和当前运行速度值之后,所述方法还包括:比较当前水平距离值与上一周期识别的前次水平距离值的大小;若当前水平距离值大于上一周期识别的前次水平距离值,列车在后退;若当前水平距离值小于上一周期识别的前次水平距离值,列车在前进。6.根据权利要求2-5任一所述的基于激光雷达的磁浮列车测速定位方法,其特征在于,所述将当前水平距离值结合上一周期识别的前次水平距离值进行分析比较,得到列车运行的累计距离和当前运行速度值之前,所述方法还包括:根据前次周期中分析得到的列车前次运行速度值,预测当前距离差值的绝对值合理区间;判断根据两个周期参考点数据分析出的当前距离差值的绝对值是否落在合理区间内;
当根据两个周期参考点数据分析出的当前距离差值的绝对值没有落在合理区间内,说明两个周期内识别的参考点不止一个,分析两个周期内参考点距离激光雷达传感器的所有水平距离值;从得出的所有水平距离值中任选两个处于不同周期内的水平距离值进行距离差值的绝对值计算,并判断计算出的距离差值的绝对值是否处于合理区间内;当计算出的距离差值的绝对值不处于合理区间内,重新选择计算,直到找出两个处于不同周期内的水平距离值之间的距离差值的绝对值处于合理区间内为止。7.根据权利要求1所述的基于激光雷达的磁浮列车测速定位方法,其特征在于,所述定位辅助物为定位辅助板,所述定位辅助板上具有透光孔;每个所述定位辅助板上的透光孔数量或尺寸大小或形状不相同,所述透光孔的数量或尺寸大小或形状为定位辅助板的识别信息。8.根据权利要求7所述的基于激光雷达的磁浮列车测速定位方法,其特征在于,所述定位辅助板上的透光孔为长方形,长方形宽度不小于3cm;将长方形透光孔在定位辅助板上进行偏移组合,形成编码信息,将每块定位辅助板独有的编码信息与每块定位辅助板的地理位置信息进行绑定。9.一种基于激光雷达的磁浮列车测速定位系统,其特征在于,所述系统包括:测速模块,用于接收激光雷达传感器检测到的参考点数据,分析参考点数据得出列车运行的累计距离和当前运行速度值;定位模块,用于接收激光雷达传感器获取的定位辅助物的识别信息,根据定位辅助物的识别信息确定列车当前所处位置;不同定位辅助物安装在列车运行轨迹不同位置处,将每个定位辅助物的识别信息与精确的地理位置信息对应保存。10.根据权利要求9所述的基于激光雷达的磁浮列车测速定位系统,其特征在于,所述测速模块具体包括:参考点数据接收子模块,用于接收激光雷达传感器周期性检测到的参考点数据;水平距离识别子模块,用于根据当前周期接收的参考点数据,识别参考点距离激光雷达传感器的当前水平距离值;运行速度分析子模块,用于将当前水平距离值结合上一周期识别的前次水平距离值进行分析比较,得到列车运行的累计距离和当前运行速度值。11.根据权利要求10所述的基于激光雷达的磁浮列车测速定位系统,其特征在于,所述水平距离识别子模块具体包括:直线距离识别单元,用于在当前周期接收的参考点数据中,识别出每次扫描的参考点以及参考点距离激光雷达传感器的直线距离值;扫描角度确定单元,用于根据识别出的参考点,确定参考点对应的激光雷达传感器的扫描角度;水平距离分析单元,用于根据扫描角度和直线距离值得到参考点距离激光雷达传感器的当前水平距离值。12.根据权利要求10所述的基于激光雷达的磁浮列车测速定位系统,其特征在于,所述将当前水平距离值结合上一周期识别的前次水平距离值进行分析比较,得到列车运行的累计距离和当前运行速度值具体包括:
将当前水平距离值与上一周期识别的前次水平距离值之间的距离差值的绝对值除以两周期之间的时间差值,计算出列车当前运行速度值;通过累计每次计算得出的距离差值的绝对值,计算出列车运行的累计距离。13.根据权利要求10所述的基于激光雷达的磁浮列车测速定位系统,其特征在于,所述测速模块还包括:水平距离值比较子模块,用于比较当前水平距离值与上一周期识别的前次水平距离值的大小;若当前水平距离值大于上一周期识别的前次水平距离值,列车在后退;若当前水平距离值小于上一周期识别的前次水平距离值,列车在前进。14.根据权利要求10所述的基于激光雷达的磁浮列车测速定位系统,其特征在于,所述测速模块还包括:合理区间预测子模块,用于根据前次周期中分析得到的列车前次运行速度值,预测当前距离差值的绝对值合理区间;距离差判断子模块,用于判断根据两个周期参考点数据分析出的当前距离差值的绝对值是否落在合理区间内;水平距离全检子模块,用于当根据两个周期参考点数据分析出的当前距离差值的绝对值没有落在合理区间内,说明两个周期内识别的参考点不止一个,分析两个周期内参考点距离激光雷达传感器的所有水平距离值;轮询子模块,用于从得出的所有水平距离值中任选两个处于不同周期内的水平距离值进行距离差值的绝对值计算,并判断计算出的距离差值的绝对值是否处于合理区间内;循环计算子模块,用于当计算出的距离差值的绝对值不处于合理区间内,重新选择计算,直到找出两个处于不同周期内的水平距离值之间的距离差值的绝对值处于合理区间内为止。15.根据权利要求9所述的基于激光雷达的磁浮列车测速定位系统,其特征在于,所述定位辅助物为定位辅助板,所述定位辅助板上具有透光孔;每个所述定位辅助板上的透光孔数量或尺寸大小或形状不相同,所述透光孔的数量或尺寸大小或形状为定位辅助板的识别信息。16.根据权利要求15所述的基于激光雷达的磁浮列车测速定位系统,其特征在于,所述定位辅助板上的透光孔为长方形,长方形宽度不小于3cm;将长方形透光孔在定位辅助板上进行偏移组合,形成编码信息,将每块定位辅助板独有的编码信息与每块定位辅助板的地理位置信息进行绑定。
技术总结
本发明适用于车辆运行管理领域,提供了一种基于激光雷达的磁浮列车测速定位方法及系统;通过接收激光雷达传感器检测到的参考点数据,分析参考点数据得出列车运行的累计距离和当前运行速度值;接收激光雷达传感器获取的定位辅助物的识别信息,根据定位辅助物的识别信息确定列车当前所处位置。利用激光雷达传感器激光测距的技术来实现磁浮列车的测速、测距和定位功能;可以根据地面障碍物参考点和定位辅助板获取到距离信息和编码信息,从而实现测速、测距和定位;有效的规避了磁浮车辆电磁干扰对测速及定位功能的影响,在低速进站时测量精度高。一套系统可以实现列车的测速、测距与定位功能,即提高了系统的可用性,又降低系统的复杂度。的复杂度。的复杂度。
技术研发人员:韩程 李紫时
受保护的技术使用者:通号粤港澳(广州)交通科技有限公司
技术研发日:2022.03.23
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。