技术特征:
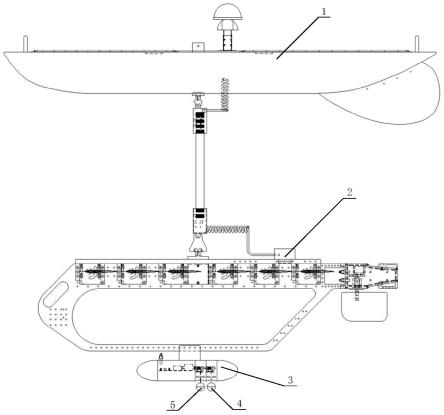
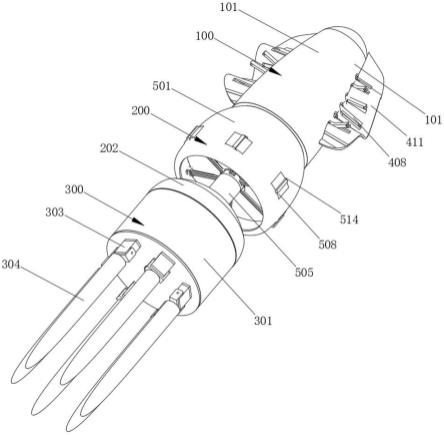
1.一种波浪滑翔器水下吊放系统,包括波浪滑翔器水面母船、波浪滑翔器水下推进器、母机、第一子机以及第二子机;其特征在于:所述母机通过母机安装板安装在波浪滑翔器水下推进器上,并通过防水连接器和波浪滑翔器的电源及波浪滑翔器主控板连接,第一子机通过空心大力马线缆悬挂在母机上,第二子机通过大力马线缆悬挂在母机上;母机的壳体内设有电机,电机的输出轴通过联轴器与减速齿轮组的输入轴相连接,减速齿轮组的输出轴通过联轴器与转动设置在母机内的主轴相连接;主轴上套有第一线轮与第二线轮,第一线轮与第二线轮被母机内壁分隔开,在第一线轮的一端设有第一电磁离合器,第一线轮的另一端处设有第一刹车器;第一电磁离合器的一端固定在第一线轮上,第一电磁离合器的另一端嵌套在主轴上,当第一电磁离合器得电时,第一线轮随主轴转动;当第一电磁离合器失电时,第一线轮不随主轴转动;第一刹车器一端固定母机内壁上,第一刹车器另一端嵌套在第一线轮的端部,当第一刹车器作用时,第一线轮不转动,当第一刹车器不工作时,第一线轮可转动;在第二线轮的一端设有第二电磁离合器,第二线轮的另一端设有第二刹车器;第二电磁离合器的一端固定在第二线轮上,第二电磁离合器的另一端嵌套在主轴上,当第二电磁离合器得电时,第二线轮随主轴转动;当第二电磁离合器失电时,第二线轮不随主轴转动;第二刹车器一端固定母机内壁上,第二刹车器另一端嵌套在第二线轮的端部,当第二刹车器作用时,第二线轮不转动,当第二刹车器不工作时,第二线轮可转动;在第一子机的内部设有蓄水槽、第一无线充电接收线圈、第一子控制单元、第一电量测量器、第一可充电电池组、姿态传感器、以及采集传感器;在第二子机的内部设有第二无线充电接收线圈、第二子控制单元、海底摄像机、第二可充电电池组和第二电池组电量测量器;在母机内还设有水泵,水泵的入水口通过水管与海水相连,水泵的出水口通过水管与蓄水槽相连,且水管穿过空心大力马线缆缠绕在第一线轮上;母机内还设有第一无线充电发射线圈、第二无线充电发射线圈、母机控制单元、第一线缆长度测量器和第二线缆长度测量器;母机控制单元通过防水连接器与波浪滑翔器主控板建立数据连接并接收指令。2.如权利要求1所述的一种波浪滑翔器水下吊放系统,其特征在于:所述第一子机和所述第二子机为球形。3.如权利要求2所述的一种波浪滑翔器水下吊放系统,其特征在于:在第一线轮的下方设有用于存放和固定第一子机的第一凹槽,在第二线轮的下方设有用于存放和固定第二子机的第二凹槽。4.如权利要求3所述的一种波浪滑翔器水下吊放系统,其特征在于:所述第一凹槽中设有限制第一子机位置的第一弹性限位装置,所述第二凹槽中设有限制第二子机位置的第二弹性限位装置。5.如权利要求1-4中任一项所述的一种波浪滑翔器水下吊放系统,其特征在于:在第一线轮与减速齿轮组之间的母机内壁上分别设有第一密封圈与第二密封圈;在第一线轮与第二线轮之间的母机内壁上分别设有第三密封圈与第四密封圈。6.如权利要求1-5中任一项所述的波浪滑翔器水下吊放系统的定深测量控制方法,具体步骤如下:步骤1:海水参数测量指令发送步骤1-1:岸端向波浪滑翔器发送海水参数测量指令,指令内容包含测量类型、测量海
域及测量深度h,其中测量类型包括区域深度模糊测量或定深度精确测量;步骤1-2:波浪滑翔器行驶至待测量海域;步骤2:吊放环境监测步骤2-1:波浪滑翔器主控板通过防水连接器向母机控制单元发送吊放环境监测指令;步骤2-2:母机控制单元接收吊放环境监测指令,先启用第一刹车器,再断开第一电磁离合器;同时先接通第二电磁离合器,再停止第二刹车器;步骤2-3:母机控制单元启动电机,并通过第二无线充电发射线圈向第二子机发送环境监测指令;步骤2-4:第二子机内的第二无线充电接收线圈接收指令后从休眠状态中激活;步骤2-5:电机正转,大力马线缆下放,第二子机随之下放,在第二子机下放的同时,第二子机控制单元控制海底摄像机开始采集下放环境数据;并通过第二无线充电接收线圈把采集的环境数据传输给母机控制单元;步骤2-6:在大力马线缆下放的同时,第二线缆长度测量器测量大力马线缆下放长度h1,并通过第二无线充电接收线圈把采集的环境数据传输给母机控制单元;步骤2-7:母机控制单元通过第二无线充电发射线圈接收环境数据,并处理,判断海底摄像机所采集的环境数据内是否存在海洋垃圾、礁石等易与缆绳缠绕的物品;若存在海洋垃圾等,转至步骤2-8;若不存在海洋垃圾等,执行步骤2-12;步骤2-8:母机控制单元控制电机反转,大力马线缆收回,第二子机随之上升;在大力马线缆收回的同时,第二线缆长度测量器测量大力马线缆收回长度h2,并传输至母机控制单元;步骤2-9:母机控制单元通过第二无线充电发射线圈接收线缆数据,并进行如下判断:h1-h2=0是否成立?若成立,则表示第二子机回收完成,转至步骤2-10,若不成立,则转至步骤2-8;步骤2-10:母机控制单元通过防水连接器向波浪滑翔器主控板发送海域范围内测量位置更换指令;步骤2-11:波浪滑翔器主控板接收指令,控制波浪滑翔器更换测量位置,转至步骤2-1;步骤2-12:母机控制单元通过第二无线充电发射线圈接收线缆数据,并进行如下判断:h-h1=0是否成立?若不成立,执行步骤2-5至步骤2-7,若成立,则表示第二子机下放至规定深度h,且下放环境安全,执行步骤2-13;步骤2-13:母机控制单元停止电机,先启动第二刹车器,再断开第二电磁离合器;并通过第二无线充电发射线圈向第二子机发送停止环境监测指令;第二子机内的第二无线充电接收线圈接收指令,第二子机控制单元控制海底摄像机停止下放环境数据采集;步骤3:测量类型判断步骤3-1:波浪滑翔器主控板通过防水连接器向母机控制单元发送海水参数测量指令;步骤3-2:母机控制单元进行海水参数测量类型判断:若指令内容为区域深度模糊测量,执行步骤4;若指令内容为定深度精确测量,执行步骤5;步骤4:海水参数区域深度模糊测量步骤4-1:母机控制单元接收区域深度模糊测量指令,先接通第一电磁离合器,再停止第一刹车器;
步骤4-2:母机控制单元启动电机,并通过第一无线充电发射线圈向第一子机发送数据采集指令;第一子机内的第一无线充电接收线圈接收指令后从休眠状态中激活;步骤4-3:电机正转,空心大力马线缆下放,第一子机随之下放,在第一子机下放的同时,第一子机控制单元控制采集传感器开始采集海水参数;在空心大力马线缆下放的同时,第一线缆长度测量器测量空心大力马线缆下放长度h3,并传输至母机控制单元;步骤4-4:母机控制单元进行如下判断:h-h3=0是否成立?若成立,则表示第一子机被下放至指定深度,转至步骤4-5;若不成立,转至步骤4-3;步骤4-5:母机控制单元停止电机,并通过第一无线充电发射线圈向第一子机发送数据停止采集指令;第一子机内的第一无线充电接收线圈接收指令,第一子机控制单元控制采集传感器停止海水参数采集;步骤4-6:母机控制单元先接通第二电磁离合器,再停止第二刹车器,然后母机控制单元启动电机;步骤4-7:母机控制单元控制电机反转,空心大力马线缆收回,第一子机随之上升,同时空心大力马线缆317收回,第二子机随之上升;在空心大力马线缆收回的同时,第一线缆长度测量器测量空心大力马线缆收回长度h4,并传输至母机控制单元;步骤4-8:母机控制单元进行如下判断:h-h4=0是否成立?若成立,则表示第一子机与第二子机收回完成,转至步骤4-9;若不成立,转至步骤4-7;步骤4-9:第一子机通过第一无线充电接收线圈把采集传感器采集的数据传输给母机控制单元;步骤4-10:母机控制单元通过第一无线充电发射线圈接收数据,并通过防水连接器传输给波浪滑翔器主控板;步骤4-11:母机控制单元停止电机,并通过第一无线充电发射线圈向第一子机发送休眠指令;第一子机内的第一无线充电接收线圈接收指令后进入休眠状态,并执行步骤6;步骤5:海水参数规定深度精确测量步骤5-1:母机控制单元接收规定深度精确测量指令,先接通第一电磁离合器,再停止第一刹车器;步骤5-2:母机控制单元启动电机,并通过第一无线充电发射线圈向第一子机发送数据采集指令;第一子机内的第一无线充电接收线圈接收指令后从休眠状态中激活;步骤5-3:电机正转,空心大力马线缆下放,第一子机随之下放,在空心大力马线缆下放的同时,第一线缆长度测量器测量空心大力马线缆下放长度h5,与此同时,姿态传感器测量第一子机在下放过程中空心大力马线缆与水平面的角度θ,并传输至母机控制单元;步骤5-4:母机控制单元进行如下判断:θ=90
°
是否成立?若不成立,转至步骤5-5;若成立,执行步骤5-7;步骤5-5:母机控制单元启动水泵,水泵从海洋内抽取海水通过空心大力马线缆内的水管注入蓄水槽内,以增加第一子机的重量,从而抵消风浪的影响;步骤5-6:姿态传感器测量第一子机在下放过程中空心大力马线缆与水平面的角度θ,并传输至母机控制单元,并执行步骤5-4;步骤5-7:母机控制单元进行如下判断:h-h5=0是否成立?若成立,则表示第一子机被下放至指定深度,转至步骤5-8;若不成立,转至步骤5-3;
步骤5-8:母机控制单元停止电机和水泵,并通过第一无线充电发射线圈向第一子机发送数据采集指令;第一子机内的第一无线充电接收线圈接收指令,第一子机控制单元控制采集传感器开始采集海水参数,在经过时间t后,第一子机控制单元停止采集传感器采集海水参数;步骤5-9:母机控制单元先接通第二电磁离合器,再停止第二刹车器,然后母机控制单元启动电机;步骤5-10:母机控制单元控制电机反转,空心大力马线缆收回,第一子机随之上升,同时空心大力马线缆收回,第二子机随之上升;在空心大力马线缆收回的同时,第一线缆长度测量器测量空心大力马线缆收回长度h6,并传输至母机控制单元;步骤5-11:母机控制单元进行如下判断:h-h6=0是否成立?若成立,则表示第一子机与第二子机收回完成,转至步骤5-12;若不成立,转至步骤5-10;步骤5-12:第一子机通过第一无线充电接收线圈把采集传感器采集的数据传输给母机控制单元;步骤5-13:母机控制单元通过第一无线充电发射线圈接收数据,并通过防水连接器传输给波浪滑翔器主控板;步骤5-14:母机控制单元停止电机,并通过第一无线充电发射线圈向第一子机发送休眠指令;第一子机内的第一无线充电接收线圈接收指令后进入休眠状态;步骤5-15:母机控制单元启动水泵,水泵从蓄水槽抽取海水通过空心大力马线缆内的水管注入海洋内,并执行步骤6;步骤6:可充电电池组电量测量步骤6-1:第一电池组电量测量器测量第一可充电电池组的电量u1,第二电池组电量测量器测量第二可充电电池组的电量u2,并传输至母机控制单元;步骤6-2:母机控制单元进行如下判断:
①
u1≤u3是否成立?若成立,执行步骤6-3至步骤6-4;若不成立,执行步骤6-7;
②
u2≤u3是否成立?若成立,执行步骤6-5至步骤6-6;若不成立,执行步骤6-7;其中,u3为充电阈值;步骤6-3:母机通过第一无线充电发射线圈对第一可充电电池组进行充电;第一电池组电量测量器测量第一可充电电池组的电量u4,并传输至母机控制单元;步骤6-4:母机控制单元进行如下判断:u4≥u5是否成立?若成立,执行步骤6-7;若不成立,转至步骤6-3;其中,u5为停止充电阈值;步骤6-5:母机通过第二无线充电发射线圈对第二可充电电池组进行充电;第二电池组电量测量器测量第二可充电电池组的电量u6,并传输至母机控制单元;步骤6-6:母机控制单元进行如下判断:u6≥u5是否成立?若成立,执行步骤6-7;若不成立,转至步骤6-5;其中,u5为停止充电阈值;步骤6-7:结束。
技术总结
本发明公开了一种波浪滑翔器水下吊放系统及其控制方法。吊放系统包括波浪滑翔器水面母船、波浪滑翔器水下推进器、母机、第一子机及第二子机;第一子机通过空心大力马线缆悬挂在母机上,第二子机通过大力马线缆悬挂在母机上;母机的壳体内设有电机,电机的输出轴与设置在母机内的主轴相连接;主轴上套有第一线轮与第二线轮,在第一线轮的一端设有第一电磁离合器,第一线轮的另一端处设有第一刹车器;当第一电磁离合器失电时,第一线轮不随主轴转动;当第一刹车器作用时,第一线轮不转动;在第二线轮的一端设有第二电磁离合器,第二线轮的另一端设有第二刹车器;当第二电磁离合器得电时,第二线轮随主轴转动;当第二刹车器作用时,第二线轮不转动。第二线轮不转动。第二线轮不转动。
技术研发人员:木建一 李培正 刘银泉 朱坤 黄毫军 王炜皋 王卫章 连雪海 王逸杰 毕轩瑞
受保护的技术使用者:中电科(宁波)海洋电子研究院有限公司
技术研发日:2022.03.31
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。