1.本发明涉及仿生技术领域、航空技术领域与控制技术领域,具体是一种扑翼旋翼混合动力的仿昆虫飞行器的飞行控制方法。
背景技术:
2.现代战争对于侦察隐蔽化、战场人员保护有越来越高的要求,无人机作为一种可携带侦察设备的低成本飞行器,可以隐蔽地实现战前和战时侦察,为战斗的决策和人员的保护提供丰富的信息。根据升力产生方式的不同,可将无人飞行器划分为固定翼飞行器,旋翼飞行器,扑翼飞行器等类别。相对而言,扑翼飞行器具有更低的飞行噪声和更高的升力效率,外形具有视觉迷惑性。其中仿昆虫扑翼飞行器体积小,隐蔽性高,更适用于隐蔽侦查等场景。国内外以代尔夫特大学为首对仿昆虫扑翼飞行器展开了多种形式的设计研究,类似的还有美国航空环境公司研发的纳米蜂鸟、德国费斯通公司的仿生蜻蜓飞行器和仿生蝴蝶飞行器、韩国建国大学的仿昆虫扑翼机、哈佛大学的机器飞虫和南京航空航天大学的仿生扑翼微型飞行器。国内外研究现状表明,仿昆虫扑翼飞行器技术仍在蓬勃发展当中,但这些扑翼飞行器仍然具有许多诸如可控自由度不全、不利控制耦合、飞行不够稳定、无法悬停飞行、扑翼升力较小、携带任务载荷的能力有限等问题和不足之处,因此其工作空间和任务时间受到了一定的限制。
技术实现要素:
3.本发明为了解决现有技术的问题,提供了一种扑翼旋翼混合动力的仿昆虫飞行器的飞行控制方法,旨在兼顾飞行器仿生外形优美、视觉迷惑性强、飞行性能稳定、体型紧凑小巧、可悬停可飞行等性能特点的同时,提高飞行升力,提升载荷能力,加快飞行速度,并提出一种双模式飞行控制方法,使其更适用于未来隐蔽侦察、警用取证、突击作战等场景中。
4.本发明提供了一种扑翼旋翼混合动力的仿昆虫飞行器,包括机身、扑翼动力组、矢量旋翼动力组和飞行控制组。
5.所述机身包括主机舱、机头、机尾、机舱底盖、侧支撑片、碳棒、底座、犄角和电池。所述主机舱为核心零部件,用于安装和固定整架飞行器所需的扑翼动力组、矢量旋翼动力组和飞行控制组等大部分零部件。所述机头和机尾的结构和外形完全一致,安装时可以通过定位销和定位孔快速定位到主机舱的前接口和后接口上,并使用双面胶或胶水固定。所述机舱底盖同样通过定位销和胶水固定到主机舱的下接口上。此时,机头、主机舱、机舱底盖和机尾形成一个封闭完整的仿生曲面外形机身。所述碳棒的上端插入主机舱下方的碳棒槽中,下端插入所述底座的碳棒槽中。所述侧支撑片的上端贴合在主机舱左右两侧,下端插入底座的侧支撑片槽中,用于粘贴扑翼膜,以及在起飞和降落过程中与碳棒共同支撑飞行器。所述电池固定在底座的上表面或下表面。所述犄角直接粘贴在机头上表面,用于保护旋翼防止碰撞,同时构成仿独角仙的仿生特征,增强视觉迷惑性。
6.所述扑翼动力组包括电机、主动齿轮、一级双层齿轮、二级偏心齿轮、连杆、摇臂、
小销钉、主轴销钉、前缘杆和扑翼膜。所述主机舱同时属于扑翼动力组的核心零部件,其上表面具有左右对称分布的一系列孔和凸台,用于安装左右扑翼动力组所需的各个零件。所述电机从主机舱内部插入较大的电机安装孔内,所述主动齿轮的内径略小于电机主轴的外径,用于以过盈配合方式安装在电机转轴上。所述一级双层齿轮通过小销钉固定在主机舱上,一级双层齿轮下齿盘同主动齿轮啮合。所述二级偏心齿轮对称安装在每组扑翼动力组的两侧,同样通过小销钉固定在主机舱上,同一级双层齿轮的上齿盘互相啮合。所述摇臂每组有两个,通过主轴销钉叠放固定在主机舱上。所述连杆每组有两个,使用小销钉将其一头固定在二级偏心齿轮的偏心孔内,另一头固定在摇臂上,进而带动所述前缘杆和扑翼膜在空中扑动。所述侧支撑片贴合在主机舱左右两侧,扑翼膜的根部平整粘贴在侧支撑片上。其中所述电机的动力分别通过主动齿轮、一级双层齿轮和二级偏心齿轮进行两级减速,通过连杆将圆周运动转换为直线运动,驱动摇臂带动扑翼往复扑动产生周期性升力。二级偏心齿轮和连杆的运动左右对称,以保证两片扑翼运动的对称性和同步性。
7.所述矢量旋翼动力组包括电机座、舵机、摇臂、转轴、无刷电机、螺旋桨和螺钉。矢量旋翼动力组的零部件主要安装在完全相同的机头和机尾上,因此头部和尾部矢量旋翼动力组的结构和外形也完全一致。所述电机座插在所述机头下表面凸起的电机座安装位上。所述转轴穿过所述电机座和机头电机座安装位上的轴孔中,将两者同轴铰接在一起。使用所述螺钉将所述无刷电机安装在电机座上,所述螺旋桨与无刷电机轴采用过盈配合的安装方式。所述摇臂内嵌于电机座侧面的摇臂槽中,所述舵机通过花键驱动摇臂偏转,从而带动电机座和无刷电机矢量偏转,无刷电机驱动螺旋桨旋转产生矢量升力。
8.所述飞行控制组包括飞控板、电调板、六角螺柱、长螺钉和螺母。飞行控制组整体安装在所述主机舱的内部。四根所述长螺钉从上面穿过主机舱上的飞控安装孔。将长螺钉对准所述电调板上的四个安装孔并插入,使用四个所述六角螺柱从下方拧入,将电调板压紧。然后将长螺钉对准所述飞控板上的四个安装孔并插入,再用四颗螺母将飞控板压紧。其中,所述飞控板用于控制飞行器稳定飞行以及模式转换,所述电调板用于同时为四个无刷电机供电和调速。
9.本发明还提供了一种扑翼旋翼混合动力的仿昆虫飞行器的飞行控制方法。所述扑翼旋翼混合动力的仿昆虫飞行器共包含六个执行器,分别为左扑翼动力组、右扑翼动力组、头旋翼动力组、尾旋翼动力组、头矢量舵机和尾矢量舵机。所述扑翼旋翼混合动力仿昆虫飞行器的飞行可以分解为四个自由度的基本运动:升降运动,俯仰运动,滚转运动,偏航运动。受运动耦合的作用,俯仰运动将进一步影响前后的纵向运动,滚转运动将进一步影响左右的横向运动。通过对六个执行器协同控制,可以实现飞行器的各个自由度运动的控制。
10.所述升降运动的控制方法是指:在飞控系统的配置中,将控制输出的油门通道信号同步分配给左右扑翼动力组和头尾旋翼动力组。旋翼动力组的油门信号将表现为无刷电机的转速,进而表现为螺旋桨的转速,从而影响升力的大小。扑翼动力组的油门信号将表现为扑翼电机的转速,进而表现为扑翼扑动的频率,从而影响扑翼升力的大小。根据不同的需要,可以分别调整扑翼和旋翼动力的相对比例大小,从而可以调节在悬停飞行时飞行器的整体振动水平。当增大油门的信号时,四个电机的转速将会同步增大,使总升力大于飞行器的重力,从而产生飞行器的上升运动。同样道理,四个电机的转速同步减小时,飞行器则会向下运动。
11.所述俯仰运动的控制方法是指:飞控系统将控制输出的俯仰通道信号分别正负分配给头尾旋翼动力组。因此俯仰通道控制信号将反应为头尾旋翼动力组螺旋桨的差速旋转。当两个螺旋桨转速不一致时,飞行器的头部和尾部将会产生升力差,进而产生俯仰力矩,机身向前或向后倾斜,从而实现俯仰运动和纵向运动。
12.所述偏航运动的控制方法是指:飞控系统将控制输出的偏航通道信号同步分配给头尾矢量舵机。矢量舵机可以驱动旋翼动力组整体左右偏转,从而使旋翼的推力产生一定的横向分力。由于矢量舵机朝相反方向安装,因此偏航通道信号将反应为头尾矢量舵机摇臂及其旋翼动力组朝相反方向的矢量偏转,进而产生头尾方向相反的横向分力。这组横向分力绕重心竖轴会形成一个航向偏转力矩,机身向左或向右偏航,从而实现偏航运动的控制。
13.所述双模式飞行控制方法是指:根据实际应用场景,可选择扑翼动力组的开启或关闭。如果扑翼动力组开启,则为扑翼旋翼混合动力模式;如果扑翼动力组关闭或不安装扑翼,则为纯旋翼动力模式。两种模式所对应的升降运动、俯仰运动和偏航运动的控制方法基本相同,唯滚转运动的控制方法不同。
14.所述扑翼旋翼混合动力模式的滚转运动控制方法是指:飞控系统将控制输出的滚转通道信号分别正负分配给左右扑翼动力组。因此滚转通道信号将反应为左右扑翼动力组扑翼扑动频率的差异。当左右两组扑翼扑动频率不一致时,飞行器的左右两侧将会产生升力差,进而产生滚转力矩,机身向左或向右倾斜,从而实现滚转运动和横向运动。
15.所述纯旋翼动力模式的滚转运动控制方法是指:飞控系统将控制输出的滚转通道信号分别正负分配给头尾矢量舵机。由于矢量舵机朝相反方向安装,因此偏航通道信号将反应为头尾矢量舵机摇臂及其旋翼动力组朝相同方向的矢量偏转,进而产生整体同向的矢量推力。由于矢量旋翼动力组的转轴高于重心纵轴,产生矢量力臂,因此这组矢量推力将绕重心纵轴形成一个滚转力矩,机身向左或向右倾斜,从而实现滚转运动和横向运动的控制。
16.本发明有益效果在于:1.以独角类昆虫为仿生对象,巧妙地将仿生扑翼、仿生犄角和仿生曲面机身外形等仿生技术与飞行器本体的结构与功能有机融合,具有控制逻辑合理,飞行性能稳定,体型紧凑小巧,视觉迷惑性强,外形隐蔽性好等优势和特色。
17.2.飞行器采用了微型旋翼作为辅助动力来源,提高了飞行器的最大升力,使飞行器即可稳定悬停,又可快速飞行,具有飞行速度快,载荷能力强等特点。
18.3.在扑翼旋翼混合动力模式下,以仿生扑翼作为主要动力来源,并直接产生滚转力矩,姿态控制更加稳定,扑翼飞行形态更加仿生。
19.4.操作者可以在飞行中调整扑翼的动力占比,从而改变机身的机械振动特性。当扑翼动力占比调整为零时,飞行器以纯旋翼动力模式飞行,机械振动最小。
20.5.在主动拆除扑翼的情况下,飞行器也可以正常地以纯旋翼动力模式飞行,飞行功能仍然完整,同时外形尺寸更加小巧,更适合隐蔽作业。
21.6.在飞行中扑翼失效或舵机失效的危险情况下,飞行器将自动进入纯旋翼动力模式,这种双模式备份的飞行控制方法可以保障飞行器安全飞行并降落。
22.7.扑翼旋翼混合动力仿昆虫飞行器可应用于室内、室外、窄巷等未来隐蔽侦察、警用取证、突击作战等场景。可飞过狭小空间,潜入敌方室内进行隐蔽侦察。功能更全面,应用
场合更广泛,更满足现代战争需求,具有非常重要的意义。
附图说明
23.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
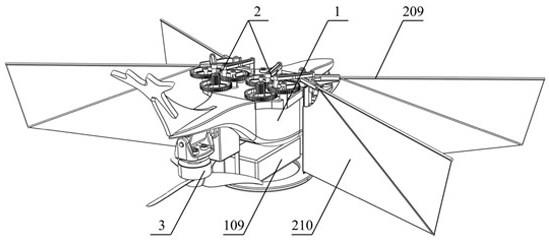
24.图1是本发明扑翼旋翼混合动力仿昆虫飞行器的整体结构外形示意图;图2是本发明扑翼旋翼混合动力仿昆虫飞行器的整体结构外形侧视图;图3是本发明扑翼旋翼混合动力仿昆虫飞行器的机身外形与飞控示意图;图4是本发明扑翼旋翼混合动力仿昆虫飞行器的扑翼动力组结构示意图;图5是本发明扑翼旋翼混合动力仿昆虫飞行器的扑翼动力组特写示意图;图6是本发明扑翼旋翼混合动力仿昆虫飞行器的旋翼动力组结构示意图;图7是本发明扑翼旋翼混合动力仿昆虫飞行器的矢量操控原理示意图。
25.在附图中:1.机身;2.扑翼动力组;3.矢量旋翼动力组;4.飞行控制组;101.主机舱;102.机头;103.机尾;104.机舱底盖;105.侧支撑片;106.碳棒;107.底座;108.犄角;109.电池;201.电机;202.主动齿轮;203.一级双层齿轮;204.二级偏心齿轮;205.连杆;206.第一摇臂;207.小销钉;208.主轴销钉;209.前缘杆;210.扑翼膜; 301.电机座;302.舵机;303.第二摇臂;304.转轴;305.无刷电机;306.螺旋桨;307.螺钉;401.飞控板;402电调板;403六角螺柱;404长螺钉;405螺母。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
27.本发明提供了一种扑翼旋翼混合动力的仿昆虫飞行器,如附图1-7所示,包括机身1、扑翼动力组2、矢量旋翼动力组3和飞行控制组4。
28.所述机身1包括主机舱101、机头102、机尾103、机舱底盖104、侧支撑片105、碳棒106、底座107、犄角108和电池109。所述主机舱101为核心零部件,用于安装和固定整架飞行器所需的扑翼动力组2、矢量旋翼动力组3和飞行控制组4等大部分零部件。所述机头102和机尾103的结构和外形完全一致,安装时可以通过定位销和定位孔快速定位到主机舱的前接口和后接口上,并使用双面胶或胶水固定。所述机舱底盖104同样通过定位销和胶水固定到主机舱的下接口上。此时,机头、主机舱、机舱底盖和机尾形成一个封闭完整的仿生曲面外形机身。所述碳棒106的上端插入主机舱下方的碳棒槽中,下端插入所述底座107的碳棒槽中。所述侧支撑片105的上端贴合在主机舱左右两侧,下端插入底座的侧支撑片槽中,用于粘贴扑翼膜,以及在起飞和降落过程中与碳棒共同支撑飞行器。所述电池109可以根据实际大小,固定在底座的上表面或下表面。所述犄角108直接粘贴在机头上表面,用于保护旋
翼防止碰撞,同时构成仿独角仙的仿生特征,增强视觉迷惑性。主机舱、机舱底盖、机头和机尾可以采用光固化3d打印工艺制成。底座和犄角可以采用木质层板、碳纤维复材板或光固化树脂等多种材料制成。电池大小不限,可根据所需的续航时间和载荷能力来选取其容量和大小。
29.所述扑翼动力组2包括电机201、主动齿轮202、一级双层齿轮203、二级偏心齿轮204、连杆205、第一摇臂206、小销钉207、主轴销钉208、前缘杆209和扑翼膜210。所述主机舱101同时属于扑翼动力组2的核心零部件,其上表面具有左右对称分布的一系列孔和凸台,用于安装左右扑翼动力组所需的各个零件。所述电机201从主机舱内部插入较大的电机安装孔内,所述主动齿轮202的内径略小于电机主轴的外径,用于以过盈配合方式安装在电机转轴上。所述一级双层齿轮203通过小销钉207固定在主机舱上,一级双层齿轮下齿盘同主动齿轮啮合。所述二级偏心齿轮204对称安装在每组扑翼动力组的两侧,同样通过小销钉固定在主机舱上,同一级双层齿轮的上齿盘互相啮合。所述第一摇臂206每组有两个,通过主轴销钉208叠放固定在主机舱上。所述连杆205每组有两个,使用小销钉将其一头固定在二级偏心齿轮的偏心孔内,另一头固定在摇臂上,进而带动所述前缘杆209和扑翼膜210在空中扑动。所述侧支撑片105贴合在主机舱左右两侧,扑翼膜的根部平整粘贴在侧支撑片上。其中,所述电机201可采用空心杯电机或微型无刷电机。电机的动力分别通过主动齿轮、一级双层齿轮和二级偏心齿轮进行两级减速,通过连杆将圆周运动转换为直线运动,驱动摇臂带动扑翼往复扑动产生周期性升力。二级偏心齿轮和连杆的运动左右对称,以保证两片扑翼运动的对称性和同步性。
30.所述矢量旋翼动力组3包括电机座301、舵机302、第二摇臂303、转轴304、无刷电机305、螺旋桨306和螺钉307。矢量旋翼动力组的零部件主要安装在完全相同的机头和机尾上,因此头部和尾部矢量旋翼动力组的结构和外形也完全一致。所述电机座301插在所述机头102下表面凸起的电机座安装位上。所述转轴304穿过所述电机座301和机头电机座安装位上的轴孔中,将两者同轴铰接在一起。使用所述螺钉307将所述无刷电机305安装在电机座上,所述螺旋桨306与无刷电机轴采用过盈配合的安装方式。所述第二摇臂303内嵌于电机座侧面的摇臂槽中,所述舵机302通过花键驱动摇臂偏转,从而带动电机座和无刷电机矢量偏转,无刷电机驱动螺旋桨旋转产生矢量升力。其中,所述电机座301可采用光固化3d打印工艺制成,所述舵机302、无刷电机305和螺旋桨306有多种型号可供选择,满足所需扭矩和升力要求即可。
31.所述飞行控制组4包括飞控板401、电调板402、六角螺柱403、长螺钉404和螺母405。飞行控制组整体安装在所述主机舱101的内部。四根所述长螺钉404从上面穿过主机舱101上的飞控安装孔。将长螺钉对准所述电调板402上的四个安装孔并插入,使用四个所述六角螺柱403从下方拧入,将电调板压紧。然后将长螺钉对准所述飞控板401上的四个安装孔并插入,再用四颗螺母405将飞控板压紧。其中,所述飞控板401用于控制飞行器稳定飞行以及模式转换,可以采用kakute f7mini或matek h743mini等多种安装孔距为20毫米的飞控板。所述电调板402用于同时为四个无刷电机供电和调速。可以采用多种型号的四合一电调板。
32.本发明还提供了一种扑翼旋翼混合动力的仿昆虫飞行器的双模式飞行控制方法。所述扑翼旋翼混合动力的仿昆虫飞行器共包含六个执行器,分别为左扑翼动力组、右扑翼
动力组、头旋翼动力组、尾旋翼动力组、头矢量舵机和尾矢量舵机。所述扑翼旋翼混合动力仿昆虫飞行器的飞行可以分解为四个自由度的基本运动:升降运动,俯仰运动,滚转运动,偏航运动。受运动耦合的作用,俯仰运动将进一步影响前后的纵向运动,滚转运动将进一步影响左右的横向运动。通过对六个执行器协同控制,可以实现飞行器的各个自由度运动的控制。
33.所述升降运动的控制方法是指:在飞控系统的配置中,将控制输出的油门通道信号同步分配给左右扑翼动力组和头尾旋翼动力组。旋翼动力组的油门信号将表现为无刷电机的转速,进而表现为螺旋桨的转速,从而影响升力的大小。扑翼动力组的油门信号将表现为扑翼电机的转速,进而表现为扑翼扑动的频率,从而影响扑翼升力的大小。根据不同的需要,可以分别调整扑翼和旋翼动力的相对比例大小,从而可以调节在悬停飞行时飞行器的整体振动水平。当增大油门的信号时,四个电机的转速将会同步增大,使总升力大于飞行器的重力,从而产生飞行器的上升运动。同样道理,四个电机的转速同步减小时,飞行器则会向下运动。
34.所述俯仰运动的控制方法是指:飞控系统将控制输出的俯仰通道信号分别正负分配给头尾旋翼动力组。因此俯仰通道控制信号将反应为头尾旋翼动力组螺旋桨的差速旋转。当两个螺旋桨转速不一致时,飞行器的头部和尾部将会产生升力差,进而产生俯仰力矩,机身向前或向后倾斜,从而实现俯仰运动和纵向运动。
35.所述偏航运动的控制方法是指:飞控系统将控制输出的偏航通道信号同步分配给头尾矢量舵机。矢量舵机可以驱动旋翼动力组整体左右偏转,从而使旋翼的推力产生一定的横向分力。由于矢量舵机朝相反方向安装,因此偏航通道信号将反应为头尾矢量舵机摇臂及其旋翼动力组朝相反方向的矢量偏转,进而产生头尾方向相反的横向分力。这组横向分力绕重心竖轴会形成一个航向偏转力矩,机身向左或向右偏航,从而实现偏航运动的控制。偏航运动的矢量操控原理如图7中的abc所示,a为向右偏航,b为中立状态,c为向左偏航。
36.所述双模式飞行控制方法是指:根据实际应用场景,可选择扑翼动力组的开启或关闭。如果扑翼动力组开启,则为扑翼旋翼混合动力模式;如果扑翼动力组关闭或不安装扑翼,则为纯旋翼动力模式。两种模式所对应的升降运动、俯仰运动和偏航运动的控制方法基本相同,唯滚转运动的控制方法不同。
37.所述扑翼旋翼混合动力模式的滚转运动控制方法是指:飞控系统将控制输出的滚转通道信号分别正负分配给左右扑翼动力组。因此滚转通道信号将反应为左右扑翼动力组扑翼扑动频率的差异。当左右两组扑翼扑动频率不一致时,飞行器的左右两侧将会产生升力差,进而产生滚转力矩,机身向左或向右倾斜,从而实现滚转运动和横向运动。
38.所述纯旋翼动力模式的滚转运动控制方法是指:飞控系统将控制输出的滚转通道信号分别正负分配给头尾矢量舵机。由于矢量舵机朝相反方向安装,因此偏航通道信号将反应为头尾矢量舵机摇臂及其旋翼动力组朝相同方向的矢量偏转,进而产生整体同向的矢量推力。由于矢量旋翼动力组的转轴高于重心纵轴,产生矢量力臂,因此这组矢量推力将绕重心纵轴形成一个滚转力矩,机身向左或向右倾斜,从而实现滚转运动和横向运动的控制。滚转运动的矢量操控原理如图7中的def所示,d为向右滚转,e为中立状态,f为向左滚转。
39.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部
分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于设备实施例而言,以上所述仅是本发明的优选实施方式,由于其基本相似于方法实施例,所以描述得比较简单,相关之处参见方法实施例的部分说明即可。以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,对于本技术领域的普通技术人员来说,可轻易想到的变化或替换,在不脱离本发明原理的前提下,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
