技术特征:
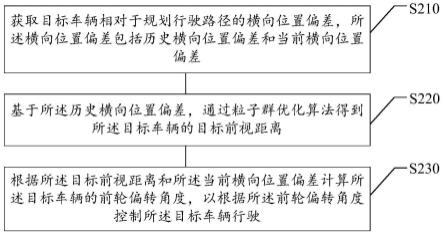
1.一种车辆路径跟踪控制方法,其特征在于,包括:获取目标车辆相对于规划行驶路径的横向位置偏差,所述横向位置偏差包括历史横向位置偏差和当前横向位置偏差;基于所述历史横向位置偏差,通过粒子群优化算法得到所述目标车辆的目标前视距离;根据所述目标前视距离和所述当前横向位置偏差计算所述目标车辆的前轮偏转角度,以根据所述前轮偏转角度控制所述目标车辆行驶。2.根据权利要求1所述的车辆路径跟踪控制方法,其特征在于,所述基于所述历史横向位置偏差,通过粒子群优化算法得到所述目标车辆的目标前视距离,包括:根据所述历史横向位置偏差构造自适应度函数;基于所述自适应度函数,通过粒子群优化算法得到所述目标车辆的目标前视距离。3.根据权利要求2所述的车辆路径跟踪控制方法,其特征在于,所述根据所述历史横向位置偏差构造自适应度函数,包括:根据所述历史横向位置偏差计算所述目标车辆的平均横向位置偏差和最大横向位置偏差;基于所述目标车辆的平均横向位置偏差和最大横向位置偏差构造所述自适应度函数。4.根据权利要求3所述的车辆路径跟踪控制方法,其特征在于,所述自适应度函数为:其中,表示计算得到的所述目标车辆的平均横向位置偏差,表示所述目标车辆允许的标准横向位置偏差,e
max
表示计算得到的所述目标车辆的最大横向位置偏差,e
max
表示所述目标车辆允许的最大横向位置偏差。5.根据权利要求2所述的车辆路径跟踪控制方法,其特征在于,所述基于所述自适应度函数,通过粒子群优化算法得到所述目标车辆的目标前视距离,包括:预设粒子群优化算法的参数,所述参数包括惯性权重、加速度因子和前视距离的范围;在预设的所述前视距离的范围内随机初始化每个粒子的位置和速度;利用所述惯性权重和加速度因子更新所述每个粒子的位置和速度,得到所述每个粒子的当前位置和当前速度;基于所述每个粒子的当前位置和当前速度,通过所述自适应度函数计算所述每个粒子的适应度值;根据所述每个粒子的适应度值更新粒子群个体最优位置和粒子群全局最优位置;当粒子群个体最优位置和粒子群全局最优位置满足预设的收敛条件时,得到所述目标车辆的目标前视距离。6.根据权利要求5所述的车辆路径跟踪控制方法,其特征在于,所述根据所述每个粒子的适应度值更新粒子群个体最优位置和粒子群全局最优位置,包括:将所述每个粒子的适应度值与所述每个粒子的历史最优适应度值进行比较,更新所述每个粒子的最优位置;将所述每个粒子的适应度值与所述粒子群的历史最优适应度值进行比较,更新所述粒
子群全局最优位置。7.根据权利要求1所述的车辆路径跟踪控制方法,其特征在于,所述根据所述目标前视距离和所述当前横向位置偏差计算所述目标车辆的前轮偏转角度,包括:获取所述目标车辆的属性信息,所述目标车辆的属性信息包括目标车辆的轴距;根据所述目标车辆的轴距、所述目标前视距离和所述当前横向位置偏差计算所述目标车辆的当前前轮偏转角度。8.一种车辆路径跟踪控制装置,其特征在于,包括:横向位置偏差获取模块,用于获取目标车辆相对于规划行驶路径的横向位置偏差,所述横向位置偏差包括历史横向位置偏差和当前横向位置偏差;目标前视距离确定模块,用于基于所述历史横向位置偏差,通过粒子群优化算法得到所述目标车辆的目标前视距离;前轮偏转角度确定模块,用于根据所述目标前视距离和所述当前横向位置偏差计算所述目标车辆的前轮偏转角度,以根据所述前轮偏转角度控制所述目标车辆行驶。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-7任一项所述的方法。10.一种电子设备,其特征在于,包括:处理器;以及存储器,用于存储所述处理器的可执行指令;其中,所述处理器配置为经由执行所述可执行指令来执行权利要求1-7任一项所述的方法。
技术总结
本公开提供一种车辆路径跟踪控制方法、装置、存储介质及电子设备;涉及车辆自动控制技术领域。所述方法包括:获取目标车辆相对于规划行驶路径的横向位置偏差,所述横向位置偏差包括历史横向位置偏差和当前横向位置偏差;基于所述历史横向位置偏差,通过粒子群优化算法得到所述目标车辆的目标前视距离;根据所述目标前视距离和所述当前横向位置偏差计算所述目标车辆的前轮偏转角度,以根据所述前轮偏转角度控制所述目标车辆行驶。本公开通过自适应的调整车辆的前视距离,可以提高车辆横向运动控制的鲁棒性,从而能够满足不同路况及不同车速下的控制需求。速下的控制需求。速下的控制需求。
技术研发人员:窦凤谦 阎兴 张亮亮
受保护的技术使用者:京东鲲鹏(江苏)科技有限公司
技术研发日:2022.04.14
技术公布日:2022/7/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。