1.本技术涉及相机标定技术领域,特别是涉及一种基于二次锥面不变量的相机内参数自标定方法和装置。
背景技术:
2.随着物联网、带视觉的机器人、无人驾驶以及无人机等技术的发展与兴起,越来越多的视频数据和图像数据需要处理,这使得视觉计算的地位越来越重要。而这些场景下的相机自标定是视觉计算中从二维图像中提取真实度量信息的关键步骤,被广泛应用于三维重构、导航、视觉监控等领域,这使得相机自标定显得非常重要。目前自标定在国际上有代表性的研究团队有牛津大学andrew zisserman、比利时的luc van gool、瑞典的anders heyden、瑞士的marc pollefeys、法国的faugeras和triggs及sturm、美国illinois大学的ma yi、腾讯ai实验室主任张正友、澳大利亚的richard i.hartley、以色列的amnon shashua、我国中科院的孟晓桥和胡占义团队等等。
3.传统的自标定方法大部分涉及到kruppa方程、分层逐步标定、消失点、消失线、绝对二次曲线以及绝对二次曲面,因像素坐标的离散,与这些概念相关的计算容易产生较大偏差。2004年张正友提出了基于一维运动标定物的相机自标定,这一方法没有涉及到前面提到的相关概念,只需要考虑有固定三个点的线段绕其中一个点转动六个状态的点的成像以及世界坐标下线段上点的位置比例就可以计算内参数,该方法难以转化成单幅图像的标定,且在有噪声的情形下计算误差也不可忽略。
技术实现要素:
4.基于此,有必要针对上述技术问题,提供一种基于二次锥面不变量的相机内参数自标定方法和装置。
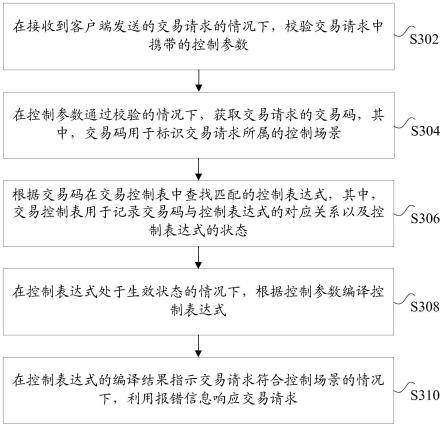
5.一种基于二次锥面不变量的相机内参数自标定方法,所述方法包括:
6.当圆的半径已知时,获取同平面上3个半径相同的圆在不同角度下的3张照片。
7.根据3张照片进行椭圆曲线拟合,得到像素坐标系下的预定数量个椭圆方程的对应矩阵a;所述预定数量为同平面圆的数量的3倍。
8.根据像素坐标系下的预定数量个椭圆方程对应矩阵a和内参数可以得到相机小孔与圆的小孔成像对应的椭圆构成的锥面方程,计算得到预定数量组及以上相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量;所述锥面不变量为关于相机内参的表达式。
9.根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和所述锥面不变量,计算得到相机的内参数;所述锥面不变量之间的关系式为:
[0010][0011]
其中,i1、i2、i3分别为3个锥面不变量;z0为小孔到圆所在平面的距离;r0为平面上圆的半径。
[0012]
在其中一个实施例中,
[0013]
根据像素坐标系下的9个及以上椭圆方程对应矩阵a和内参数可以得到相机小孔与圆的小孔成像对应的椭圆构成的锥面方程,从而计算得到相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量,步骤中所述相机小孔与圆的小孔成像对应的椭圆构成的锥面方程为:
[0014][0015]
其中,(x y z)为在世界坐标系下锥面上的点p的坐标,α,β是图像(u,v)坐标系的尺度因子,(u0,v0)是图像主点坐标,γ为偏斜参数,为像素坐标系下椭圆方程的对应矩阵a。
[0016]
相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量为:
[0017]
i1=a
11
α2 a
33
u0(a
13
a
11
u0 a
12
v0) v0(a
23
a
12
u0 a
22
v0) a
13
u0 a
23
v0 β(a
22
β a
12
γ) γ(a
12
β a
11
γ)
[0018][0019][0020]
其中:a
11
、a
12
、a
13 a
12
、a
22
、a
23
、a
33
为椭圆方程对应矩阵a中元素。
[0021]
在其中一个实施例中,根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和所述锥面不变量,计算得到相机的内参数,包括:
[0022]
选取同平面上其中3个圆的小孔成像对应的椭圆与相机小孔构成锥面对应的锥面不变量,得到像素坐标系下的9组所述锥面不变量。
[0023]
将9组所述锥面不变量代入到锥面不变量之间的关系式中,得到以相机内参和小孔到圆所在平面的距离为未知数的9个方程。
[0024]
采用非线性最小二乘解方法对9个所述方程进行求解,得到相机的内参数。
[0025]
在其中一个实施例中,
[0026]
当圆的半径未知时,获取的照片是同平面上4个半径相同的圆在不同角度下的3张照片。
[0027]
根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和所
述锥面不变量,计算得到相机的内参数,步骤前还包括:
[0028]
根据相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量和锥面不变量之间的关系式构建4个等式;4个等式为:
[0029][0030]
将4个等式中的r0,z0消去,得到只包括锥面不变量的方程。
[0031][0032]
其中,i
ij
为平面上第j个圆对应的第i个不变量,i=1,2,3,4j=1,2,3,4。
[0033]
在其中一个实施例中,根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和所述锥面不变量,计算得到相机的内参数,包括:
[0034]
将相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量代入所述只包括锥面不变量的方程中,得到以相机内参为未知数的2个方程,三张照片共得6个方程。
[0035]
采用非线性最小二乘解方法对6个所述方程进行求解,得到相机的内参数。
[0036]
一种基于二次锥面不变量的相机内参数自标定装置,所述装置包括:
[0037]
标定用照片获取模块,用于当圆的半径已知时,获取同平面的3个半径相同的圆在不同角度下的3张照片。
[0038]
椭圆方程的对应矩阵a确定模块,用于根据3张照片进行椭圆曲线拟合,得到像素坐标系下的预定数量个椭圆方程的对应矩阵a;所述预定数量为同平面圆的数量的3倍。
[0039]
锥面不变量表达式确定模块,用于根据像素坐标系下的预定数量个椭圆方程对应矩阵a和相机小孔与圆的小孔成像对应的椭圆构成的锥面方程,计算得到预定数量组及以上相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量;所述锥面不变量是关于相机内参的表达式。
[0040]
相机的内参数确定模块,用于根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和所述锥面不变量,计算得到相机的内参数;所述锥面不变量之间的关系式为:
[0041][0042]
其中,i1、i2、i3分别为3个锥面不变量;z0为小孔到圆所在平面的距离;r0为平面上圆的半径。
[0043]
在其中一个实施例中,
[0044]
所述锥面不变量表达式确定模块中所述相机小孔与圆的小孔成像对应的椭圆构成的锥面方程为:
[0045][0046]
其中,(x y z)为在世界坐标系下锥面上的点p的坐标,α和β是图像(u,v)坐标系的尺度因子,(u0,v0)是图像主点坐标,γ为偏斜参数,为像素坐标系下椭圆方程对应矩阵a。
[0047]
相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量为:
[0048]
i1=a
11
α2 a
33
u0(a
13
a
11
u0 a
12
v0) v0(a
23
a
12
u0 a
22
v0) a
13
u0 a
23
v0 β(a
22
β a
12
γ) γ(a
12
β a
11
γ)
[0049][0050][0051]
其中:a
11
、a
12
、a
13 a
12
、a
22 a
23 a
33
为椭圆方程对应矩阵a个元素。
[0052]
在其中一个实施例中,相机的内参数确定模块,还用于选取同平面上其中3个半径相同圆的小孔成像对应的椭圆与相机小孔构成锥面对应的锥面不变量,得到像素坐标系下的9组所述锥面不变量;将9组所述锥面不变量代入到锥面不变量之间的关系式中,得到以相机内参和小孔到圆所在平面的距离为未知数的9个方程;采用非线性最小二乘解方法对9个所述方程进行求解,得到相机的内参数。
[0053]
在其中一个实施例中,当圆的半径未知时,获取的照片是同平面上4个半径相同的圆在不同角度下的3张照片;相机的内参数确定模块之前还包括:同一张照片中锥面不变量之间关系确定模块,用于根据相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量和锥面不变量之间的关系式构建4个等式;4个等式为:
[0054][0055]
将4个等式中的r0,z0消去,得到只包括锥面不变量的方程。
[0056][0057]
其中,i
ij
为平面上第j个圆对应的第i个不变量,i=1,2,3,4j=1,2,3,4。
[0058]
在其中一个实施例中,相机的内参数确定模块,还用于将相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量代入所述只包括锥面不变量的方程中,得到以相机内参为未知数的6个方程;采用非线性最小二乘解方法对6个所述方程进行求解,得到相机的内参数。
[0059]
上述基于二次锥面不变量的相机内参数自标定方法和装置,所述方法包括:当圆的半径已知时,获取同平面上3个半径相同的圆的在不同角度下的3张照片;根据3张照片进行椭圆曲线拟合,得到像素坐标系下的9个以上椭圆方程的对应矩阵a;根据像素坐标系下的9个以上椭圆方程对应矩阵a和相机小孔与圆的小孔成像对应的椭圆构成的锥面方程,计算得到9组以上相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量;根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和所述锥面不变量,计算得到相机的内参数。该自标定方法不需要各圆之间的相对位置以及对应的世界坐标,只需圆的半径以及各圆对应像素坐标下的椭圆方程,不需要对各圆精准匹配,使得应用场景更为灵活。
附图说明
[0060]
图1为一个实施例中基于二次锥面不变量的相机内参数自标定方法的流程示意图;
[0061]
图2为一个实施例中基于二次锥面不变量的相机内参数自标定装置的结构框图。
具体实施方式
[0062]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
[0063]
数码相机图像拍摄的过程实际上是一个光学成像的过程。相机的成像过程涉及到四个坐标系:世界坐标系、相机小孔坐标系、成像平面坐标系、像素坐标系以及这四个坐标系的转换。
[0064]
普通相机的成像一般看作是小孔成像再叠加一个传感器成像,小孔成像前在拍摄物体所在的空间有一个坐标系叫世界坐标系,镜头小孔位置有一个坐标系称为相机小孔坐标系,小孔成像的接收平面建立的坐标系为成像平面坐标系,小孔成像后利用传感器成像原理经过拉伸,旋转和平移得到像素图像,根据像素图像行列位置建立的坐标系称为像素坐标系。
[0065]
在一个实施例中,如图1所示,提供了一种基于二次锥面不变量的相机内参数自标定方法,该方法包括以下步骤:
[0066]
步骤100:当圆的半径已知时,获取同平面上3个半径相同的圆在不同角度下的3张照片。
[0067]
步骤102:根据3张照片进行椭圆曲线拟合,得到像素坐标系下的预定数量个椭圆方程的对应矩阵a;预定数量为同平面圆的数量的3倍。
[0068]
具体的,像素坐标系下椭圆曲线拟合方程的具体包括如下步骤:
[0069]
1)获取二值化图像;
[0070]
2)利用连通集提取图像中椭圆;
[0071]
3)利用二次插值的思想提取图像的亚像素边界,对椭圆进行形态学中的膨胀,并找椭圆轮廓多边形内的亚像素边界点作为椭圆改进的轮廓,再找轮廓的柔性边界从而剔除椭圆内的干扰点;
[0072]
4)对边界进行多边形的线段插值,使边界点稀疏均匀;
[0073]
5)运用非线性最小二乘的迭代法求常数项为固定值的椭圆一般方程;
[0074]
6)由此求得对应矩阵a。
[0075]
替换方法可以用同心圆亚像素轮廓提取的思想来更精准计算椭圆对应矩阵a,参考同心圆亚像素轮廓提取的相关文献。
[0076]
步骤104:根据像素坐标系下的预定数量个椭圆方程对应矩阵a和内参数可以得到相机小孔与圆的小孔成像对应的椭圆构成的锥面方程,计算得到预定数量组及以上相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量;锥面不变量为关于相机内参的表达式。
[0077]
步骤106:根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和锥面不变量,计算得到相机的内参数;锥面不变量之间的关系式为:
[0078][0079]
其中,i1、i2、i3分别为3个锥面不变量;z0为小孔到圆所在平面的距离;r0为平面上圆的半径。
[0080]
具体的,关于相机小孔与圆构成的锥面不变量有公式的推到原理为:
[0081]
设世界坐标系水平面上有半径为r0的圆,圆心为(xc,yc),小孔到该平面的距离为z0,结合小孔的世界坐标,将世界坐标系原点平移到小孔,则该圆与小孔构成的锥面在该坐标系下的方程为
[0082][0083]
二次曲面有旋转平移不变量,i
′1为上面公式中三阶矩阵对角元素和,i
′2为该矩阵的对角元素的二阶余子式之和,i
′3为该矩阵的行列式,即
[0084][0085]
因方程可能相差一个常系数k,因而不变量也会对应改变,设方程乘以k后对应不变量为i1,i2,i3,则不难知有如下关系:
[0086]
i1=ki
′1,i2=k2i
′2,i3=k3i
′3[0087]
将上式代入公式(3)中,可得:
[0088][0089]
所以:
[0090]
消去k,并化简得:
[0091]
世界坐标系下的锥面与小孔成像这边的锥面为同一个对顶锥面,因此方程相差一个常系数k,所以两者的方程相差一个常系数k,则关于相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量有公式
[0092]
上述基于二次锥面不变量的相机内参数自标定方法中,所述方法包括:获当圆的半径已知时,取同平面上3个半径相同的圆的在不同角度下的3张照片;根据3张照片进行椭圆曲线拟合,得到像素坐标系下的9个以上椭圆方程的对应矩阵a;根据像素坐标系下的9个以上椭圆方程对应矩阵a和相机小孔与圆的小孔成像对应的椭圆构成的锥面方程,计算得到9组以上相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量;根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和所述锥面不变量,计算得到相机的内参数。该自标定方法不需要各圆之间的相对位置以及对应的世界坐标,只需圆的半径以及各圆对应像素坐标下的椭圆方程,不需要对各圆精准匹配,使得应用场景更为灵活。
[0093]
在其中一个实施例中,步骤104中相机小孔与圆的小孔成像对应的椭圆构成的锥面方程为:
[0094]
[0095]
其中,(x y z)为在世界坐标系下锥面上的点p的坐标,α,β是图像(u,v)坐标系的尺度因子,(u0,v0)是图像主点坐标,γ为偏斜参数,为像素坐标系下椭圆方程对应矩阵a;
[0096]
相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量为:
[0097][0098][0099][0100]
其中:a
11
、a
12
、a
13 a
12
、a
22
、a
23
、a
33
为椭圆方程对应矩阵a中元素。具体的,相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量与内参数的关系推导:
[0101]
小孔成像以及拉伸和旋转,圆的成像必定是椭圆,设像素坐标系下的椭圆方程为:
[0102]
因
[0103]
所以小孔成像的椭圆方程为:
[0104][0105]
简记为:
[0106]
小孔坐标系下小孔成像的点(u
1 v1ꢀ‑
f)与小孔连线上任取一点(x y z)有关系式:即:
[0107]
则结合公式(8)有小孔与小孔成像的椭圆构成的锥面方程为:
[0108][0109]
化简得
[0110][0111]
其不变量表达式如式(5)、式(6)和式(7)所示。
[0112]
在其中一个实施例中,步骤106包括:选取同平面上其中3个圆的小孔成像对应的椭圆与相机小孔构成锥面对应的锥面不变量,得到像素坐标系下的9组锥面不变量;将9组锥面不变量代入到锥面不变量之间的关系式中,得到以相机内参和小孔到圆所在平面的距离为未知数的9个方程;采用非线性最小二乘解方法对9个方程进行求解,得到相机的内参数。
[0113]
在其中一个实施例中,当圆的半径未知时,获取的照片是同平面上4个半径相同的圆在不同角度下的3张照片;:步骤106前还包括:根据相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量和锥面不变量之间的关系式构建4个等式;4个等式为:
[0114][0115]
将4个等式中的r0,z0消去,得到只包括锥面不变量的方程。
[0116][0117]
其中,i
ij
为平面上第j个圆对应的第i个不变量,i=1,2,3,4j=1,2,3,4。
[0118]
在其中一个实施例中,步骤106包括将相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量代入只包括锥面不变量的方程中,得到以相机内参为未知数的2个方程,三张照片共得6个方程;采用非线性最小二乘解方法对6个方程进行求解,得到相机的内参数。
[0119]
应该理解的是,虽然图1的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行
完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0120]
在一个实施例中,如图2所示,提供了一种基于二次锥面不变量的相机内参数自标定装置,包括:标定用照片获取模块、椭圆方程的对应矩阵a确定模块、锥面不变量表达式确定模块和相机的内参数确定模块,其中:
[0121]
标定用照片获取模块,用于当圆的半径已知时,获取同平面的3个半径相同的圆在不同角度下的3张照片。
[0122]
椭圆方程的对应矩阵a确定模块,用于根据3张照片进行椭圆曲线拟合,得到像素坐标系下的预定数量个椭圆方程的对应矩阵a;预定数量为同平面圆的数量的3倍。
[0123]
锥面不变量表达式确定模块,用于根据像素坐标系下的预定数量个椭圆方程对应矩阵a和相机小孔与圆的小孔成像对应的椭圆构成的锥面方程,计算得到预定数量组及以上相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量;锥面不变量是关于相机内参的表达式。
[0124]
相机的内参数确定模块,用于根据相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量之间的关系式和锥面不变量,计算得到相机的内参数;锥面不变量之间的关系式为:
[0125][0126]
其中,i1、i2、i3分别为3个锥面不变量;z0为小孔到圆所在平面的距离;r0为平面上圆的半径。
[0127]
在其中一个实施例中,锥面不变量表达式确定模块中相机小孔与圆的小孔成像对应的椭圆构成的锥面方程为:
[0128][0129]
其中,(x y z)为在世界坐标系下锥面上的点p的坐标,α和β是图像(u,v)坐标系的尺度因子,(u0,v0)是图像主点坐标,γ为偏斜参数,为像素坐标系下椭圆方程对应矩阵a。
[0130]
相机小孔与圆的小孔成像对应的椭圆构成的锥面不变量为:
[0131]
i1=a
11
α2 a
33
u0(a
13
a
11
u0 a
12
v0) v0(a
23
a
12
u0 a
22
v0) a
13
u0 a
23
v0 β(a
22
β a
12
γ) γ(a
12
β a
11
γ)
[0132][0133][0134]
其中:a
11
、a
12
、a
13 a
12
、a
22 a
23 a
33
为椭圆方程对应矩阵a个元素。
[0135]
在其中一个实施例中,相机的内参数确定模块,还用于选取同平面上其中3个相同圆的小孔成像对应的椭圆与相机小孔构成锥面对应的锥面不变量,得到像素坐标系下的9组锥面不变量;将9组锥面不变量代入到锥面不变量之间的关系式中,得到以相机内参和小孔到圆所在平面的距离为未知数的9个方程;采用非线性最小二乘解方法对9个方程进行求解,得到相机的内参数。
[0136]
9、根据权利要求6的装置,当圆的半径未知时,获取的照片是同平面上4个半径相同的圆在不同角度下的3张照片;相机的内参数确定模块之前还包括:同一张照片中锥面不变量之间关系确定模块,用于根据相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量和锥面不变量之间的关系式构建4个等式;4个等式为:
[0137][0138]
将4个等式中的r0,z0消去,得到只包括锥面不变量的方程。
[0139][0140]
其中,i
ij
为平面上第j个圆对应的第i个不变量,i=1,2,3,4j=1,2,3,4。
[0141]
在其中一个实施例中,相机的内参数确定模块,还用于将相机小孔与同一张照片上的四个椭圆构成锥面对应的锥面不变量代入只包括锥面不变量的方程中,得到以相机内参为未知数的6个方程;采用非线性最小二乘解方法对6个方程进行求解,得到相机的内参数。
[0142]
关于基于二次锥面不变量的相机内参数自标定装置的具体限定可以参见上文中
对于基于二次锥面不变量的相机内参数自标定方法的限定,在此不再赘述。上述基于二次锥面不变量的相机内参数自标定装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0143]
在一个仿真验证新实施例中,利用公式(1)可得出如果小孔到某平面的距离z0,该平面上有已知半径的圆则建立一个含有z0和5个内参数的关系式。如果空间上有三个这种互不平行的平面,每个平面上至少有2个(因为一个平面含有一个z0,为了能消去z0至少需要2个圆)已知半径的圆共9个圆,则可得到9个关系式,因z0为小孔到讨论平面的距离,每个平面对应的z0不同,因而有三个z0,5个内参数,由9个关系式可以求得相机的内参数。
[0144]
设内参数矩阵为设小孔在世界坐标系下坐标为(0,0,200),初始时正对下方拍摄,相机初始小孔坐标系坐标向量在世界坐标系的坐标为列向量构成r矩阵,这里设设世界坐标系内到小孔的距离为z0=200的水平坐标平面上有九个半径为r0=20的圆,其初始小孔坐标系下的圆心空间坐标为(xc,yc,200),作为优选xc=[1,50,100,3,80,200,5,79,168]、yc=[2,100,200,13,130,230,24,140,190]。
[0145]
在小孔坐标系下以小孔为顶点,由各圆构成的锥面方程为:
[0146][0147]
前三个圆直接成像计算得像素坐标系下的椭圆方程
[0148][0149]
后面六个圆分两组将世界坐标系的水平面绕小孔作旋转,对应正交矩阵为t1,t2,则旋转后再成像得椭圆方程为
[0150][0151]
和
[0152]
在此实施例中设通过如上公式(12,13,14)对应九个椭圆方程,因此相应得到九个椭圆方程对应的公式(4)中的矩阵由式(5)、式(6)和式(7)可以求得到各椭圆方程对应矩阵的不变量,再针对这九个椭圆运用式(1)建立9个方程,而这里未知参数为5个内参数和一个z0(因这里9个圆本来来自于同一个平面,后绕小孔旋转区分开,因此旋转后小孔到平面的距离相同),一般情形下三个平面会有三个不同的z0,由于方程个数大于等于未知数个数,可以求解出内参数。这里用非线性最小二乘解方法进行求解验证了方程组的可解以及结果的正确性。
[0153]
在r0未知的情况下,需要再增加三个圆,4个圆为一组,可得到12个关系式,具体实施方式与上述三个圆的计算过程一致。
[0154]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0155]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。