三轴磁力仪的变分h线圈校准方法
1.相关申请的交叉引用
2.本技术要求2019年11月14日提交的美国申请序列号62/935,284的更早提交日期的权益,该美国申请的全部公开内容以引用方式并入本文。
背景技术:
3.在资源回收行业中,磁场传感器诸如磁通门磁力仪可用于井下应用,诸如勘测、钻柱路线校正等。这些测量的准确度取决于正确校准的磁力仪。针对自然或环境磁场执行磁力仪的校准过程。由于校准位置附近的钢结构或磁性部件,这些场可能是不均匀的,这导致校准过程中存在困难。因此,需要开发一种用于在未知的和/或非均匀环境磁场的区域中校准磁力仪的方法。
技术实现要素:
4.本文公开了一种在钻孔柱中用定向工具勘测井筒的方法。定向工具的第一传感器设置在非均匀环境磁场中。向第一传感器施加第一外加磁场。在第一传感器设置在非均匀环境磁场内并且施加第一外加磁场时,在第一传感器处获得第一测量结果。向第一传感器施加第二外加磁场。在第一传感器设置在非均匀环境磁场内并且施加第二外加磁场时,在第一传感器处获得第二测量结果。基于第一测量结果和第二测量结果来校准定向工具。在井筒中用经校准的定向工具来获得井下勘测测量结果。
5.本文还公开了一种用于定向工具的系统,该定向工具在钻孔柱中用于勘测井筒。该定向工具包括第一传感器,该第一传感器通过以下操作进行校准:将第一传感器设置在非均匀环境磁场中;将第一外加磁场施加到第一传感器;在第一传感器设置在非均匀环境磁场内并且施加第一外加磁场时,在第一传感器处获得第一测量结果;将第二外加磁场施加到第一传感器;在第一传感器设置在非均匀环境磁场内并且施加第二外加磁场时,在第一传感器处获得第二测量结果;并且基于第一测量结果和第二测量结果来校准定向工具。用设置在井筒中的经校准的定向工具来获得井下勘测测量结果。
附图说明
6.以下描述不应被认为以任何方式进行限制。参考附图,相同元件以相同附图标记表示:
7.图1示出了例示性实施方案中的钻孔组件;
8.图2例示了定向工具或探头,示出了定向工具或探头坐标系和安装在定向工具或探头内的传感器的传感器坐标系;
9.图3示出了可用于钻柱的勘测和地质导向的例示性磁测量定向工具或探头,以及基准定向工具或探头和校准组件;
10.图4示出了传感器的z轴与定向工具或探头坐标系的轴线之间的关系;
11.图5示出了例示确定传感器的未对准角的方法的流程图;并且
12.图6示出了例示确定传感器偏差的方法的流程图。
具体实施方式
13.本文所公开的设备和方法的一个或多个实施方案的详细描述以参照附图举例而非限制的方式呈现。
14.在本发明中,包括井下工具的主(未校准)传感器的定向工具或探头相对于基准(经校准的)传感器进行校准。这些传感器可以通过比例参数来表征,使得传感器响应可以通过比例参数和外加的场来计算。在定向工具或探头与基准传感器之间确实存在已知的角度,例如测量的角度。例如,定向工具或探头与基准传感器之间的已知角度可以为0
°
,使得定向工具或探头的轴线和基准传感器的轴线沿相同的定向工具或探头轴线对准。主传感器与定向工具或探头的轴线未对准,未对准角在校准过程中确定。除了环境磁场诸如可能非均匀的自然或背景磁场之外,外加磁场被施加到主传感器和基准传感器两者。在本公开的上下文中,非均匀磁场包括各向异性磁场,例如具有均匀总磁场强度的各向异性磁场。非均匀磁场可以至少对于进行如下所述的校准过程的测量所需的时间是非时变的。使用具有外加磁场的情况下的磁测量结果来确定比例参数和主传感器的可选偏差,继而可用于确定未对准角。然后可以基于比例参数、可选偏差和未对准角来校正主传感器处的井下磁场测量结果。
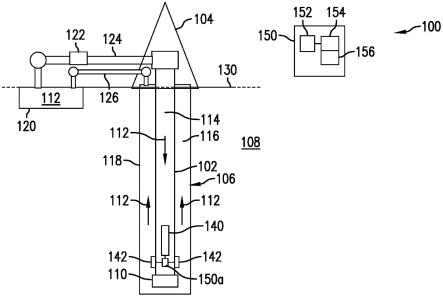
15.参考图1,在例示性实施方案中示出了钻孔组件100。钻孔组件100包括从钻机104延伸到形成在地层108中的井筒106中的钻柱102。钻柱102包括在底端处用于钻探井筒106的钻头110。钻头110可以通过钻柱102从地面位置130处的钻机104的旋转以及/或者通过井下马达(未示出)的旋转而旋转。钻柱102包括中空内孔114,并且在钻柱102的外表面与井筒106的壁118之间形成环孔。
16.在操作中,钻探泥浆112从地面位置130处的泥浆池120经由地面位置130处的泵122通过内孔114向井下泵送,并且在钻头110处离开钻柱102。泵122通常位于立管124中,该立管将钻探泥浆112从泥浆池120输送到钻柱102的顶部。一旦钻探泥浆112在钻头110处离开钻柱102,钻探泥浆112就经由环孔116返回地面位置130。在地面位置130处,钻探泥浆112经由回流管线126返回到泥浆池120。
17.钻柱112还包括用于控制钻柱102的各种操作的控制单元150。控制单元150包括处理器152和存储器存储装置154,该存储器存储装置包括各种程序和指令156,当由处理器152访问时,这些程序和指令使得处理器152能够执行本文所公开的各种操作。控制单元150可位于地面位置130或沿钻柱102的井下位置,诸如井下控制单元150a。
18.钻柱112还包括适用于改变钻柱102的钻孔方向的操纵单元140。在各种实施方案中,井下控制单元150a基于勘测信息来激活操纵单元140。钻柱102还包括工具,诸如定向工具,该定向工具可以是钻具或者可以是包括在钻具中的探头142,并且可包括勘测仪器。定向工具或探头142可包括倾斜仪。在各种实施方案中,定向工具或探头142包括响应并且获得地球磁场的测量结果的一组磁力仪。磁力仪可以是单轴或多轴的,诸如两轴/双轴或三轴磁力仪。在各种实施方案中,磁力仪为磁通门传感器、霍尔效应磁力仪、磁阻传感器、超导量子干涉装置(squid)、mems、洛伦兹力型磁力仪、原子气体磁力仪、原子干涉仪、光纤磁力仪或本领域中已知的任何其他磁力仪装置。磁场的测量结果可以在井下控制单元150a或地面
控制单元150处使用,以便确定钻柱102的钻孔方向,并且因此激活操纵单元140,以便根据由测量结果确定的钻孔方向来改变钻柱102的方向。
19.在另选的实施方案中,定向工具或探头142被包括在电缆管柱(wireline string)(未示出)中,该电缆管柱被构造成在定向工具或探头142在井筒106中处于井下时,下降到井筒106中以进行井下勘测测量。在用于钻孔柱诸如电缆管柱或钻柱102之前,可以校准定向工具或探头142的磁力仪以便提供准确的井下测量。下面讨论用于校准定向工具或探头142的磁力仪的方法。
20.在一个实施方案中,定向工具或探头142包括一个双轴传感器和一个单轴传感器的组合。在各种实施方案中,定向工具或探头142包括两个双轴磁力仪,其中一个双轴磁力仪始终用作双轴磁力仪,而另一个双轴磁力仪用作双轴或单轴磁力仪,具体取决于定向工具或探头的要求。在另外的实施方案中,定向工具或探头142可包括一个或两个三轴磁力仪。可以使用沿所选择的方向对准并且类似地定向的两个磁力仪来确定沿对准方向的磁场梯度。
21.在一个实施方案中,可以假设用在此描述的方法校准的磁力仪对磁场h具有响应hm,然后可以由一阶多项式来定义该响应,该一阶多项式然后可以被写成如方程(1)所示:
22.hm=αh β
ꢀꢀ
方程(1)
23.其中α(也称为“α矩阵”)包括传感器的一个或多个比例参数和未对准系数,并且(也称为“β向量”)包括磁力仪的一个或多个偏差系数。然而,可以由一次多项式定义的磁力仪响应仅是示例,而不应理解为是限制。虽然在本文使用可以由一次多项式定义的响应来说明该方法,但应当理解,该方法可以容易地应用并且扩展到由高阶多项式或其他函数(诸如指数函数、对数函数、阶跃函数,诸如表格,或它们的任何组合)定义、内插或描述的磁力仪响应。用于定义、内插或描述磁力仪响应的高阶多项式或其他函数可包括每个磁场分量多于一个比例参数。例如,用于定义、内插或描述磁力仪响应的高阶多项式或其他函数可包括每个磁场分量两个、五个、十个或更多的比例参数。
24.图2示出了定向工具或探头142,示出了安装在定向工具或探头142内的磁力仪的定向工具或探头坐标系202和传感器坐标系204。定向工具或探头坐标系202通过使用素数向量(x
′
,y
′
,z
′
)来指示。z
′
轴平行于定向工具或探头142的纵向轴线210,并且x
′
轴和y
′
轴在横向于(通常垂直于)纵向轴线210的平面内定向。在图2的示例中,x
′
轴垂直于z
′
并且指向页面外,而y
′
轴垂直于z
′
(纵向轴线210)和x
′
并且位于页面内。
25.传感器坐标系204通过使用非素数向量(x,y,z)来指示。传感器坐标系204被示出为与定向工具或探头坐标系202未对准,以便反映本发明所解决的未对准问题。当将传感器安装在定向工具或探头142的机械组件中时,小的轴未对准使得难以将传感器的轴与定向工具或探头的轴对准。所选择的定向工具或探头轴线与所选择的传感器轴线之间的这种未对准由θ
工具轴线
′‑
传感器轴线
(即,两个轴线之间的角度)来表示。因此,在定向工具或探头的轴线中的磁场分量到传感器的轴线中的投影被表示为所谓的未对准系数,该未对准系数为该未对准角的余弦(即,cos(θ
工具轴线
′‑
传感器轴线
))。该余弦项是方程(1)的α矩阵的α分量(即,α
工具轴线
′‑
传感器轴线
)的一部分,表示比例和未对准误差。特别地,α矩阵的系数α
工具轴线
′‑
传感器轴线
可以被写成如方程(2)所示:
26.α
工具轴线
′‑
传感器轴线
=αocos(θ
工具轴线
′‑
传感器轴线
)
ꢀꢀ
方程(2)
27.其中α0是基于传感器灵敏度和环境干扰的比例系数,并且θ
工具轴线-传感器轴线
是传感器轴线与定向工具或探头的轴线之间的未对准角。
28.磁力仪的三轴排布结构的响应可以表示为如方程(3)所示:
[0029][0030]
其中是定向工具或探头的(x
′
,y
′
,z
′
)坐标系内的磁场。方程(3)适用于磁力仪的单轴或多轴排布结构,诸如磁力仪的双轴、三轴或什至更多轴的排布结构。和的向量分量的数量等于磁力仪的多轴排布结构的轴数,而矩阵α的矩阵元素的数量等于磁力仪的多轴排布结构的轴数的平方。例如,对于磁力仪的单轴排布结构,和的向量分量的数量等于1,而矩阵α的矩阵元素的数量也等于1。换句话讲,对于单轴排布结构,量分量的数量等于1,而矩阵α的矩阵元素的数量也等于1。换句话讲,对于单轴排布结构,和α是简单的标量。对于磁力仪的双轴排布结构,和的向量分量的数量等于2,而矩阵α的矩阵元素的数量等于4。对于磁力仪的三轴排布结构,和的向量分量的数量等于3,而矩阵α的矩阵元素的数量等于9。仅出于说明而非限制的目的,对磁力仪的三轴排布结构进行以下推导。对于磁力仪的其他单轴或多轴排布结构,也可以容易地应用下面的讨论。对于磁力仪的三轴排布结构,方程(3)可被改写成扩展形式,如方程(4)所示:
[0031][0032]
其中是传感器在传感器x轴上的响应,是传感器在传感器y轴上的响应,并且是传感器在传感器z轴上的响应。系数β
x
、βy和βz是沿传感器的相应的x轴、y轴和z轴的偏差系数。
[0033]
使用方程(2),方程(4)中的阿尔法α矩阵可以被分解成其比例系数和未对准角的函数,如下所示:
[0034][0035]
也可以写成方程(6):
[0036]
[0037]
作为例示性示例,是沿y轴的比例系数,并且是定向工具或探头轴y
′
相对于传感器轴x之间的角度。方程(4)中的系数说明了场沿定向工具或探头的y
′
轴方向相对于传感器x轴的投影。因此,例如,定向工具或探头y
′
轴与传感器z轴之间的α矩阵的系数可以写成沿传感器z轴的比例系数与定向工具或探头y
′
轴与传感器z轴之间的角度的乘积,如方程(7)所示:
[0038][0039]
由于定向工具或探头传感器之间的未对准,沿传感器的所选择的轴诸如z轴的测量结果(即,)携带来自沿定向工具或探头轴线(即,h
′
x
、h
′y和h
′z)参考的磁场的所有三个分量的信息。方程(8)、(9)和(10)表示沿方程(4)底部行的计算,以为例,描述了传感器的传感器磁场分量相对于定向工具或探头轴线中的磁场的分解:
[0040][0041][0042]
以及
[0043][0044]
通常,定向工具或探头的z
′
轴与传感器的z轴之间的未对准角(θz′‑z)是小角度(例如,小于
±
10度,诸如小于
±
5度,例如小于
±
2度)。因此,对于垂直于纵向轴线210的磁场分量(即,分量h
′
x
和h
′y)的贡献明显小于平行于纵向轴线的磁场分量(即,分量h
′z)的贡献。
[0045]
例如,当z轴与z
′
轴之间的角度较小时(例如,小于
±
10度,诸如小于
±
5度,例如小于
±
2度),方程(10)的角度θ
x
′‑z和θy′‑z接近90度。在这种情况下,以下方程(11)和方程(12)的近似成立:
[0046]
cos(θ
x
′‑z)<<cos(θz′‑z)
ꢀꢀ
方程(11)
[0047]
cos(θy′‑z)<<cos(θz′‑z)
ꢀꢀ
方程(12)
[0048]
因此,方程(13)和方程(14)为真:
[0049]
α
x
′‑z<<αz′‑zꢀꢀ
方程(13)
[0050]
αy′‑z<<αz′‑zꢀꢀ
方程(14)
[0051]
图3示出了例示性的第一定向工具或探头300,该第一定向工具或探头可用于钻柱诸如钻柱102的勘测和地质导向。第一定向工具或探头300安装在校准组件320内。第一定向工具或探头300包括待校准的第一传感器302(本文中也被称为“主传感器”)。第二传感器304(本文中也被称为“基准传感器”)被包括在校准组件320中。第一传感器302与第二传感器304轴向分开所选择的间隔距离。对于磁力仪的三轴排布结构,第一传感器302和第二传感器304是分别由x1、y1、z1坐标系和x2、y2、z2坐标系表征的三轴传感器。在第一定向工具或探头的纵向轴线z
′
与第一传感器的x1、y1、z1坐标系之间可存在未知的未对准角,使得第
一传感器的x1、y1、z1轴中没有一个轴指向第一定向工具或探头的纵向轴线z
′
的方向。此外,第一定向工具或探头300的纵向轴线z
′
和基准传感器的x2、y2、z2坐标系可以由一定的分离角分开,使得x1、y2和z2轴和z
′
轴中的至少一个轴由可以测量和/或选择的分离角分开。例如,第一定向工具或探头300的纵向轴线z
′
和基准传感器的z2轴可以由0
°
的分离角分开,诸如基准传感器的z2轴沿第一定向工具或探头300的纵向轴线z
′
定向或基本上定向,或者第一定向工具或探头300的纵向轴线z
′
和基准传感器的z2轴可以由20度、30度、45度的分离角或任何其他合适的分离角分开。在一个实施方案中,第二传感器304被包括在第二定向工具或探头中。有利地,第一定向工具或探头300和第二定向工具或探头具有相同或类似的种类,例如具有相同或类似的尺寸、材料和/或设计。相同或类似类型的第一定向工具或探头和第二定向工具或探头的这种构型将确保由第一定向工具或探头引起的磁干扰将与由第二定向工具或探头引起的磁干扰相同或类似。在一个实施方案中,第二定向工具或探头已经被校准,并且上述分离角由第一定向工具或探头的纵向轴线与第二定向工具或探头的纵向轴线之间的角度限定。此外,可以在第一传感器302与第二传感器304之间提供可选的阻隔件306,以将第一传感器302与第二传感器304进行隔离。由于它们的轴向分离以及由于可能的非均匀环境磁场,第一传感器302和第二传感器304通常经历不同的磁场。
[0052]
在一个实施方案中,第一定向工具或探头300和第二定向工具或探头可以包括其他定向传感器,诸如加速度计/重力计(未示出)或陀螺仪。此类其他定向传感器可用于至少部分地对准第一定向工具或探头300和第二定向工具或探头,以调节或测量第一定向工具或探头300与第二定向工具或探头之间的分离角,诸如第一定向工具或探头300与第二定向工具或探头之间的分离角低于10度,诸如低于5度或甚至低于2度。例如,通过使用第一定向工具或探头300的高侧或第二定向工具或探头的高侧中的至少一者作为基准点,第一定向工具或探头300和第二定向工具或探头可以至少部分地彼此对准。这可以通过对准加速度计/重力计或陀螺仪(未示出)的一个轴线来执行,加速度计/重力计或陀螺仪可以分别与定向工具或探头300中的基准传感器和主传感器与两个传感器的重力场相反地对准。然而,一旦被置于适当的位置,在第一传感器302的z1轴与第一定向工具或探头的纵向轴线之间通常仍然存在角度未对准。类似地,在第二传感器304的z2轴与第二定向工具或探头的纵向轴线之间可存在角度未对准。
[0053]
图3还示出了用于将外加磁场引入到第一传感器和第二传感器的一对线圈。另选地,可以利用一个或多个永磁体来将外加磁场施加到第一传感器和第二传感器。该对线圈可以电耦合到电源315,该电源提供通过线圈的电流,以便在第一传感器和第二传感器处产生一个或多个磁场。另外,来自该对线圈的测量结果可以被发送至处理器310,该处理器执行本文所公开的各种计算,用于校准第一定向工具或探头内的主传感器,确定未对准角、比例参数、传感器偏差等。主线圈312可用于将外加磁场施加到第一传感器302,并且基准线圈314可用于将外加磁场施加到第二传感器304。在各种操作中,主线圈312和基准线圈314分别向第一传感器302和第二传感器304施加相同的外加磁场。可以例如通过控制算法来控制外加磁场。在各种实施方案中,主线圈312和基准线圈314可以是沿第一定向工具或探头和/或第二定向工具或探头300的长度延伸以覆盖第一传感器302和第二传感器304两者的单个线圈。主线圈312和基准线圈314被示出为定向成产生沿第一定向工具或探头或者第一定向工具或探头和第二定向工具或探头的纵向轴线z
′
的外加磁场。在下面讨论的另外的实施方
案中,主线圈312和基准线圈314可以被定向成产生沿第一定向工具或探头的x
′
轴和y
′
轴的磁场。
[0054]
为了将主传感器302校准到基准传感器304,在施加第一外加磁场的情况下获得第一组磁测量结果,然后一旦施加了第二外加磁场就获得第二组磁测量结果。在一个实施方案中,第一外加磁场或第二外加磁场可以为零。例如,如果第一外加磁场为零,则在不施加外加磁场的情况下获得第一组磁测量结果,然后一旦施加第二非零的外加磁场就获得第二组磁测量结果。方程(3)和方程(4)概括描述了定向工具或探头坐标系中的磁场测量结果与每个传感器的坐标系中的磁场之间的关系。因此,这些方程的应用提供了足够的信息来确定比例参数、未对准角和偏差系数,如下文所示。有利地,此类测量结果可以在不同温度下进行,例如通过使用加热和/或冷却装备,诸如加热室和/或冷却室。在各种温度下确定校准参数,诸如比例参数、未对准角和偏差系数,将允许确定和应用作为温度的函数的校准参数。例如,如果在第一温度下确定第一组校准参数,则可以将其应用于在由第一温度表示的温度下进行的测量,例如落在与第一温度相同的温度区间内的测量。如果在第二温度下确定第二组校准参数,则可以将其应用于在由第二温度表示的温度下进行的测量,例如落在与第二温度相同的温度区间内的测量等。如果校准参数明显取决于温度,则这种温度相关的校准允许获得更为准确的测量结果。类似地,在一些定向工具或探头中,所安装的导线在运行时可以承载干扰传感器位置处的局部磁场的大电流。如果不对此进行考虑,则在校准方法未考虑的情况下,此类载流导线可导致系统测量误差。因此,一个或多个导线(未示出)或其他导体可以被添加到校准组件320,适于承载所选择的电流,并且因此可用于模拟由在运行时通过第一传感器302的电流引起的干扰磁场。例如,可以在定向工具或探头内添加一个或多个导线,该一个或多个导线位于相同或类似的位置,并且承载与井下操作时的电流相同或类似的电流。在一个或多个导线或导体中的各种电流下确定校准参数(诸如比例参数、未对准角和偏差系数)将允许确定和应用作为电流和/或导线或导体与传感器之间的距离的函数的校准参数。例如,如果在导致第一干扰磁场的第一电流/距离处确定第一组校准参数,则可以将其应用于在由第一干扰磁场表示的干扰磁场处进行的测量,例如落在与第一干扰磁场相同的干扰磁场区间内的测量。如果在导致第二干扰磁场的第二电流/距离处确定第二组校准参数,则可以将其应用于在由第二干扰磁场表示的干扰磁场处进行的测量,例如落在与第二干扰磁场相同的干扰磁场区间内的测量。如果校准参数明显依赖于在运行时可能发生的干扰磁场,则这种干扰磁场相关校准允许获得更准确的测量结果。
[0055]
在下文中,假设在不施加外加磁场的情况下获得第一组磁测量结果,然后一旦施加非零的外加磁场就获得一组磁测量结果。如上所述,这是一种特殊情况,即,在施加第一外加磁场的情况下获得第一组磁测量结果,然后一旦施加了第二外加磁场就获得第二组磁测量结果。对于在不施加外加磁场的情况下获得第一组磁测量结果,然后一旦施加非零的外加磁场就获得一组磁测量结果的情况,对方程(3)求逆得到以下方程(15):
[0056][0057]
类似地,对方程(4)求逆得到以下方程(16):
[0058][0059]
使用以下校准方法来确定α矩阵和向量的分量。在第一时间(t=t0),对主传感器302和基准传感器304处的环境磁场均进行测量。由于环境磁场的不均匀性,主传感器302和基准传感器304处的环境磁场可以不同。一般来讲,主传感器302将测量环境磁场而基准传感器304测量环境磁场其中在第二时间(t=t1),经由线圈312、314施加已知的外加磁场hc,并且在主传感器302和基准传感器304处进行第二组测量。
[0060]
在第一时间(t=t0),仅测量环境磁场。在第一传感器302处,原始测量结果m1
x
、m1y和m1z如方程(17)所示而定义:
[0061][0062]
其中h1
′
x
、h1
′y和h1
′z是第一传感器302的位置处的真实磁场的x
′
、y
′
和z
′
分量。
[0063]
由于第二传感器304先前已校准,因此测量结果m2
x
、m2y和m2z等于h2
′
x
、h2
′y和h2
′z,即第二传感器304的位置处的真实磁场的x
′
、y
′
和z
′
分量,如方程(18)所示:
[0064][0065]
在第二时间段(t=t1),电流ic被施加到一个或多个线圈312、314以在传感器302、304中的每一个传感器处产生外加磁场可以控制电流ic以产生受控的外加磁场。外加磁场可以与第一定向工具或探头的轴线,诸如第一定向工具或探头的z
′
轴对准。因此,适用。当外加磁场被施加到第一传感器时,输出值如方程(19)所示:
[0066][0067]
当外加磁场被施加到第二传感器304时,输出值如方程(20)所示:
[0068][0069]
沿z轴的比例参数αz′‑z可以使用下面关于方程(21)至(24)讨论的计算来确定。首先使用来自基准传感器的测量结果来确定比例参数。根据方程(17):
[0070][0071]
根据方程(19)(其中),可以得出:
[0072][0073]
组合方程(21)和方程(22)导致:
[0074][0075]
并且因此
[0076][0077]
在时间t=t0(方程(18))来自基准传感器的测量结果得到以下方程(25)至(27):
[0078][0079][0080][0081]
类似地,在时间t=t1(方程(20))来自基准传感器的测量结果得到以下方程(28):
[0082][0083]
组合方程(25)和方程(28)得出:
[0084][0085]
因此:
[0086][0087]
方程(30)确定外加磁场的z
′
分量,然后可以在方程(24)中使用该分量来确定αz′‑z的值。作为替代方案,还可以通过测量施加到线圈312、314的电流和线圈几何形状来确定这可以通过本领域已知的解析公式或第一传感器位置处的磁场的数值模拟来完成。
[0088]
现在可以重新定向线圈312、314以产生沿y
′
轴的外加磁场,并且在时间t=t2记录一组新的测量结果。在时间t=t2,外加磁场沿y
′
轴的方向施加到主传感器302和基准传感器304,使得从方程(19)的矩阵的第三行,可以确定:
[0089][0090]
因此,组合方程(17)和方程(32)得到:
[0091][0092]
并且因此
[0093][0094]
可以根据方程(34)来计算αy′‑z的值,因为所有其他变量都是已知的。具体地从方程(20)已知:
[0095][0096]
将方程(26)代入方程(35)得到:
[0097][0098]
得出
[0099][0100]
方程(37)可以代入方程(34)以确定αy′‑z。
[0101]
现在可以重新定向线圈312、314以产生沿x
′
轴的外加磁场,并且在时间t=t3进行一组新的测量结果。在时间t=t3,外加磁场沿x
′
轴的方向施加到主传感器302和基准传感器304,使得根据方程(19),可以确定:
[0102][0103]
组合方程(17)和方程(38)得到:
[0104][0105]
因此,
[0106][0107]
可以在方程(40)中计算α
x
′‑z的值,因为所有其他变量都是已知的。具体地从方程(20)已知:
[0108][0109]
将方程(27)代入方程(41)得到:
[0110][0111]
因此,
[0112][0113]
方程(43)可以代入方程(40)以确定α
x
′‑z。
[0114]
方程(15)至(43)中示出的步骤可用于类似地导出如方程4中所定义的矩阵α的所有缺失系数。虽然关于校准的以上描述限于具有可以由一次多项式定义、内插或描述的响应的传感器(有时也被称为“线性传感器”),但相同的方法也可以容易地应用于将高阶多项式或其他函数用于定义、内插或描述磁力仪响应并且每个磁场分量可包括多于一个比例参数的传感器。在这种情况下,必须相应地增加要在各种外加磁场下进行的测量次数,以得出可以解析求解或数值求解(例如,通过数值反转、查找函数或类似的方法)的对应的方程组。
[0115]
为了确定沿z轴的偏差系数,使沿y
′
轴和x
′
轴的磁场为零或基本上为零。为了获得沿y
′
轴和x
′
轴的可忽略磁场,定向工具或探头被定向成沿z
′
轴平行于地球磁场。为了进行示意性的说明,这在时间t=t4执行。根据方程(17),对于时间t=t4,可以得出:
[0116][0117][0118][0119]
在时间t=t5,第一定向工具或探头的z
′
轴与地球磁场对准,并且在时间t=t4从其位置旋转180度。在时间t=t5产生的磁场如下:
[0120][0121][0122][0123]
将方程(46)和方程(49)相加获得:
[0124][0125]
因此:
[0126][0127]
在各种实施方案中,校准组件320与第一定向工具或探头300一起在t=t4与t=t5之间旋转。然而,如果校准组件320包含磁性材料,则这可带来缺点。有利地,校准组件320不包含磁性材料。此外或另选地,校准组件320可以不与第一定向工具或探头一起在t=t4与t=t5之间旋转。在各个方面,当第一定向工具或探头围绕第一传感器302的位置旋转时也是有益的。为了实现第一定向工具或探头围绕第一传感器302的位置的旋转,第一定向工具或探头可以可旋转地安装,使得旋转枢轴穿过第一传感器302的中心,或靠近第一传感器的中心穿过第一传感器,例如在不超过50cm的距离处,例如小于20cm,诸如小于10cm。
[0128]
图4示出了传感器的z轴与定向工具或探头坐标系的x
′
、y
′
、z
′
轴之间的关系。由于定向工具或探头的x
′
、y
′
和z
′
轴以及传感器的x、y和z轴相互正交,因此可能仅用两个未知角度来表示未对准,诸如φ和ψ或者γ和θz′‑z,如图4所示并且如下所述。
[0129]
传感器坐标系中的磁场分量可以使用定向工具或探头坐标系中的磁分量用本文
所公开的方程(7)至(9)来书写。未对准角θz′‑z可以根据互补角重写。例如,可以根据传感器的z轴402与传感器的z轴到x
′‑y′
平面的投影404之间的角度φ来书写未对准角θz′‑z,其中:
[0130][0131]
同样根据图4:
[0132][0133]
同样根据图4,对于角度θ
x
′‑z可以确定:
[0134]
cos(θ
x
′‑z)=cos(ψ)*cos(φ)
ꢀꢀ
方程(54)
[0135]
并且通过将其与方程(52)和方程(53)组合,这导致
[0136]
cos(θ
x
′‑z)=cos(90
°‑
γ)*cos(90
°‑
θz′‑z).
ꢀꢀ
方程(55)
[0137]
使用三角恒方程,方程(55)可以重写为:
[0138]
cos(θ
x
′‑z)=(cos(90
°
)*cos(γ) sin(90
°
)*sin(γ))*(cos(90
°
)*cos(θz′‑z) sin(90
°
)*sin(θz′‑z))
ꢀꢀ
方程(56)
[0139]
从而得到:
[0140]
cos(θ
x
′‑z)=sin(γ)*sin(θz′‑z).
ꢀꢀ
方程(57)
[0141]
关于角度θ
x
′‑z,从图4可以确定:
[0142]
cos(θy′‑z)=cos(γ)*cos(φ)
ꢀꢀ
方程(58)
[0143]
因此,用方程(52),
[0144]
cos(θy′‑z)=cos(γ)*cos(90
°‑
θz′‑z)
ꢀꢀ
方程(59)
[0145]
并且用三角恒方程
[0146]
cos(θy′‑z)=cos(γ)*sin(θz′‑z).
ꢀꢀ
方程(60)
[0147]
使用方程(57)和方程(60)的结果,方程(10)可以重写为:
[0148][0149]
因此,
[0150][0151][0152][0153]
通过对于三个参数γ和θz′‑z求解方程(62)至(64),可以确定沿传感器z轴的未对准角和比例系数。可以进行对应的分析以确定沿传感器y轴和传感器x轴的比例系数以及其他未对准角。
[0154]
图5示出了例示在实施方案中确定传感器的未对准角的方法的流程图500。在框502中,将第一定向工具或探头设置在非均匀磁场中,诸如地球磁场,例如受磁性材料和/或源的干扰的周围的地球磁场。第一定向工具或探头包括与第一定向工具或探头的轴线成未对准角的第一传感器。第二传感器设置在非均匀磁场中,与第一传感器位置处的非均匀磁场的磁场强度相比,第二传感器位置处的非均匀磁场可具有不同的强度。第二传感器可以设置在之前可能已经校准的第二定向工具或探头内。在框504中,在第一传感器处获得第一
磁测量结果,并且在第二传感器处获得第二磁测量结果。在框506中,将外加磁场施加到第一传感器和第二传感器。在框508中,当施加外加磁场时,在第一传感器处获得第三磁测量结果,并且在第二传感器处获得第四磁测量结果。在框510中,在第三磁测量结果与第一磁测量结果之间确定第一磁差,并且在第四磁测量结果与第二磁测量结果之间确定第二磁差。在框512中,根据第一磁差与第二磁差的比率来确定将第一传感器的轴线与第二传感器的轴线相关的比例参数。在框514中,根据比例参数来确定第一传感器的未对准角。
[0155]
图6示出了例示确定传感器偏差的方法的流程图600。在框602中,至少包括第一传感器的定向工具或探头设置在非均匀磁场(即,地球磁场)中,其中第一传感器或定向工具或探头的所选择的轴线(例如,z轴)与地球磁场对准。在框604中,在第一传感器处获得第一磁测量结果。在框606中,第一传感器围绕基本上垂直于所选择的轴线的旋转轴线旋转180度。优选地,旋转轴线穿过第一传感器或与传感器相距很近的距离(例如,不大于50cm,例如小于20cm,诸如小于10cm的距离)。在框608中,在第一传感器处获得第二磁测量结果。在框610中,根据第一磁测量结果和第二磁测量结果来确定第一传感器沿所选择的轴线的偏差。
[0156]
下面示出了前述公开的一些实施方案:
[0157]
实施方案1:一种在钻孔柱中用定向工具勘测井筒的方法。所述定向工具的第一传感器设置在非均匀环境磁场中。向所述第一传感器施加第一外加磁场。在所述第一传感器设置在所述非均匀环境磁场内并且施加所述第一外加磁场时,在所述第一传感器处获得第一测量结果。向所述第一传感器施加第二外加磁场。在所述第一传感器设置在所述非均匀环境磁场内并且施加所述第二外加磁场时,在所述第一传感器处获得第二测量结果。基于所述第一测量结果和所述第二测量结果来校准所述定向工具。在所述井筒中用经校准的定向工具来获得井下勘测测量结果。
[0158]
实施方案2:根据任一先前实施方案所述的方法,其中所述第一外加磁场和所述第二外加磁场中的至少一者基本上为零。
[0159]
实施方案3:根据任一先前实施方案所述的方法,其中所述钻孔柱为钻柱,并且还包括通过使用所述井下勘测测量结果用所述钻柱来钻探所述井筒。
[0160]
实施方案4:根据任一先前实施方案所述的方法,还包括将第二传感器设置在所述非均匀环境磁场中,将所述第一外加磁场施加到所述第二传感器,在所述第二传感器设置在所述非均匀环境磁场内并且施加所述第一外加磁场时,在所述第二传感器处获得第三测量结果,将所述第二外加磁场施加到所述第二传感器,在所述第二传感器设置在所述非均匀环境磁场内并且施加所述第二外加磁场时,在所述第二传感器处获得第四测量结果,并且基于所述第一测量结果、所述第二测量结果、所述第三测量结果和所述第四测量结果来校准所述定向工具。
[0161]
实施方案5:根据任一先前实施方案所述的方法,其中所述第二传感器为经校准的传感器。
[0162]
实施方案6:根据任一先前实施方案所述的方法,其中校准包括确定一个或多个校准参数,所述一个或多个校准参数是所述第一传感器的灵敏度和所述第一传感器相对于所述定向工具的未对准中的至少一者的函数。
[0163]
实施方案7:根据前述实施方案中任一项所述的方法,其中所述定向工具具有第一纵向轴线,还包括确定所述第一纵向轴线与所述第二传感器的轴线之间的传感器基准角
度,并且基于所确定的工具基准角度来校准所述定向工具。
[0164]
实施方案8:根据任一先前实施方案所述的方法,其中所述定向工具具有第一纵向轴线,并且所述第二传感器处于具有第二纵向轴线的经校准的基准定向工具中,还包括确定所述第一纵向轴线与所述第二纵向轴线之间的工具基准角度,并且基于所确定的工具基准角度来校准所述定向工具。
[0165]
实施方案9:根据任一先前实施方案所述的方法,其中所述工具基准角度小于10度。
[0166]
实施方案10:根据任一先前实施方案所述的方法,其中所述定向工具和所述基准定向工具在尺寸、磁源和磁性材料分布中的至少一个方面具有相同的设计。
[0167]
实施方案11:根据任一先前实施方案所述的方法,其中所述定向工具具有第一纵向轴线,并且所述第一外加磁场和所述第二外加磁场基本上与所述第一纵向轴线对准。
[0168]
实施方案12:根据任一先前实施方案所述的方法,其中所述第一传感器对所述第一外加磁场或所述第二外加磁场具有由一次多项式定义的响应。
[0169]
实施方案13:根据任一先前实施方案所述的方法,还包括沿所述定向工具的所述x轴、所述定向工具的所述y轴和所述定向工具的所述z轴中的至少一者施加外加磁场。
[0170]
实施方案14:根据任一先前实施方案所述的方法,其中所述定向工具具有第一纵向轴线,所述方法还包括:根据在所述第一纵向轴线平行于所述地球磁场对准的情况下获得的所述第一传感器的测量结果和在所述第一纵向轴线反向平行于所述地球磁场对准的情况下获得的所述第一传感器的测量结果来确定所述第一传感器的偏差。
[0171]
实施方案15:根据任一先前实施方案所述的方法,还包括根据所述一个或多个校准参数来确定所述第一传感器相对于所述定向工具的未对准。
[0172]
实施方案16:根据任一先前实施方案所述的方法,还包括使用经校准的第一传感器来确定所述井筒中的磁梯度。
[0173]
实施方案17:根据任一先前实施方案所述的方法,其中校准包括确定一个或多个校准参数,所述一个或多个校准参数是温度的函数,并且其中针对第一温度和第二温度确定所述校准参数。
[0174]
实施方案18:根据任一先前实施方案所述的方法,其中所述定向工具包括被构造成承载电流的导线,并且其中校准包括确定一个或多个校准参数,其中所述校准参数是所述电流的函数,并且其中针对通过所述导线的第一电流和通过所述导线的第二电流确定所述校准参数。
[0175]
实施方案19:一种在钻孔柱中用于勘测井筒的定向工具。所述系统包括第一传感器,所述第一传感器通过以下操作进行校准:将所述第一传感器设置在非均匀环境磁场中,将第一外加磁场施加到所述第一传感器,在将所述第一传感器设置在所述非均匀环境磁场内并且施加所述第一外加磁场时,在所述第一传感器处获得第一测量结果,将第二外加磁场施加到所述第一传感器,在所述第一传感器设置在所述非均匀环境磁场内并且施加所述第二外加磁场时,在所述第一传感器处获得第二测量结果,并且基于所述第一测量结果和所述第二测量结果来校准所述定向工具。用设置在所述井筒中的经校准的定向工具来获得井下勘测测量结果。
[0176]
实施方案20:根据任一先前实施方案所述的定向工具,其中所述第一外加磁场和
所述第二外加磁场中的至少一者基本上为零。
[0177]
实施方案21:根据任一先前实施方案所述的定向工具,其中所述钻孔柱为钻柱,并且还包括通过使用所述井下勘测测量结果用所述钻柱来钻探所述井筒。
[0178]
实施方案22:根据任一先前实施方案所述的定向工具,还包括将第二传感器设置在所述非均匀环境磁场中,将所述第一外加磁场施加到所述第二传感器,在所述第二传感器设置在所述非均匀环境磁场内并且施加所述第一外加磁场时,在所述第二传感器处获得第三测量结果,将所述第二外加磁场施加到所述第二传感器,在所述第二传感器设置在所述非均匀环境磁场内并且施加所述第二外加磁场时,在所述第二传感器处获得第四测量结果,并且基于所述第一测量结果、所述第二测量结果、所述第三测量结果和所述第四测量结果来校准所述定向工具。
[0179]
实施方案23:根据任一先前实施方案所述的定向工具,其中所述第二传感器为经校准的传感器。
[0180]
实施方案24:根据任一先前实施方案所述的定向工具,其中校准包括确定一个或多个校准参数,所述一个或多个校准参数是所述第一传感器的灵敏度和所述第一传感器相对于所述定向工具的未对准中的至少一者的函数。
[0181]
实施方案25:根据前述实施方案中任一项所述的定向工具,其中所述定向工具具有第一纵向轴线,还包括确定所述第一纵向轴线与所述第二传感器的轴线之间的传感器基准角度,并且基于所确定的工具基准角度来校准所述定向工具。
[0182]
实施方案26:根据任一先前实施方案所述的定向工具,其中所述定向工具具有第一纵向轴线,并且所述第二传感器在具有第二纵向轴线的经校准的基准定向工具中,还包括确定所述第一纵向轴线与所述第二纵向轴线之间的工具基准角度,并且基于所确定的工具基准角度来校准所述定向工具。
[0183]
实施方案27:根据任一先前实施方案所述的定向工具,其中所述工具基准角度小于10度。
[0184]
在描述本发明的上下文中(特别是在所附权利要求的上下文中),术语“一个”、“一种”和“该”以及类似指代的使用应被解释为涵盖单数和复数,除非在本文另外指明或与上下文明显地矛盾。此外,应当指出的是,本文的术语“第一”、“第二”等并不表示任何顺序、数量或重要性,而是用来将一个元素与另一个元素区分开。与数量结合使用的修饰语“约”包含所陈述的值并且具有由上下文决定的含义(例如,其包括与特定数量的测量相关联的误差度)。
[0185]
本公开的教导内容可用于多种井操作。这些操作可涉及使用一种或多种处理剂来处理地层、地层中驻留的流体、井筒、和/或井筒中的设备,诸如生产管材。处理剂可以是液体、气体、固体、半固体、以及它们的混合物的形式。例示性的处理剂包括但不限于压裂液、酸、蒸汽、水、盐水、防腐剂、粘固剂、渗透性调节剂、钻井泥浆、乳化剂、破乳剂、示踪剂、流动性改进剂等。例示性的井操作包括但不限于水力压裂、增产、示踪剂注入、清洁、酸化、蒸汽注入、注水、固井等。
[0186]
虽然已参考一个或多个示例性实施方案描述了本发明,但本领域的技术人员将理解,在不脱离本发明的范围的情况下,可作出各种改变并且可用等同物代替其元件。另外,在不脱离本发明的基本范围的情况下,可作出许多修改以使特定情形或材料适应本发明的
教导内容。因此,预期的是,本发明不限于作为设想用于实现本发明的最佳模式而公开的特定实施方案,而是本发明将包括落入权利要求书的范围内的所有实施方案。另外,在附图和具体实施方式中,已公开了本发明的示例性实施方案,并且尽管已采用了特定术语,但除非另外指明,否则它们仅以一般性和描述性意义使用,而非出于限制的目的,否则本发明的范围因此并不限于此。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。