1.本发明涉及光学式分选机,更详细而言涉及具有朝向分选对象物放出具有不可见波长区域内的波长的光的光源的光学式分选机。
背景技术:
2.以往,公知有一种光学式分选装置,其使用在对分选对象物照射了近红外光时由光学传感器得到的光信息,来判别并除去分选对象物所包含的异物、不合格品(例如,下述的专利文献1)。在这种分选装置中,光学传感器为了接收对分选对象物照射近红外光线由此得到的反射光及/或透过光,而具备在近红外线波长区域具有分光灵敏度的峰值的光学元件。
3.专利文献1:日本特开2000-157936号
4.然而,上述的光学元件价格高昂,从而会导致分选机的高价格化。该问题不限于使用近红外光的分选机,在利用具有不可见波长区域的波长的光的光学式分选机中是共通的。据此,要求降低利用具有不可见波长区域的波长的光的光学式分选机的制造成本。
技术实现要素:
5.本发明是为了解决上述课题而完成的,例如能够作为以下方式来实现。
6.根据本发明的第一方式,提供一种光学式分选机。该光学式分选机具备第一光学传感器,该第一光学传感器具有作为用于检测具有与红色对应的波长的光的光学元件的r元件、作为用于检测具有与绿色对应的波长的光的光学元件的g元件、和作为用于检测具有与蓝色对应的波长的光的光学元件的b元件。r元件、g元件和b元件分别在可见波长区域具有分光灵敏度的峰值。r元件、g元件和b元件中的至少两个元件在不可见波长区域中的规定的波长区域具有非零的分光灵敏度。光学式分选机进一步具备:第一光源,其朝向分选对象物放出具有规定的波长区域内的波长的第一光;累计部,其对在从第一光源放出了第一光时经由至少两个元件而取得的信号的至少一部分或者与信号对应的灰度值的至少一部分进行累计;以及第一判定部,其基于由累计部累计的信号或者灰度值进行异物及/或不合格品的判定。
7.根据该光学式分选机,通过具备在可见波长区域具有分光灵敏度的峰值的r元件、g元件和b元件的光学传感器,能够检测具有不可见波长区域的波长的第一光。换言之,不使用具备在不可见波长区域具有分光灵敏度的峰值的光学元件的光学传感器,就能够检测具有不可见波长区域的波长的第一光。通常,具备在可见波长区域具有分光灵敏度的峰值的r元件、g元件和b元件的光学传感器与具备在不可见波长区域具有分光灵敏度的峰值的光学元件的光学传感器相比非常廉价。因此,能够降低利用具有不可见波长区域的波长的光的光学式分选机的制造成本。并且,对经由至少两个元件而取得的信号的至少一部分(即,由r元件取得的r信号、由g元件取得的g信号、和由b元件取得的b信号中的至少两个信号)或者灰度值的至少一部分(即,与r信号对应的r灰度值、与g信号对应的g灰度值、和与b信号对应
的b灰度值中的至少两个灰度值)进行累计,因此信号被放大或者灰度值被增大。因此,即便上述规定的波长区域中的元件各自的相对灵敏度较低,也能够抑制因灵敏度不足而引起的异物及/或不合格品的判定精度的降低。即,根据本方式的光学式分选机,能够兼得降低制造成本和确保所需的判定精度。此外,“信号”意味着表示检测出的光的强度的模拟信号。
8.根据本发明的第二方式,在第一方式的基础上,r元件、g元件和b元件中的全部元件在规定的波长区域具有非零的分光灵敏度。累计部对在从第一光源放出了第一光时经由r元件、g元件和b元件而取得的信号或者灰度值进行累计。根据该方式,能够使信号进一步放大或者使灰度值进一步增大。因此,能够进一步抑制异物及/或不合格品的判定精度的降低。
9.根据本发明的第三方式,在第一方式或第二方式的基础上,累计部使用加权系数对信号或者灰度值进行累计。根据该方式,为了得到所需的判定精度,能够根据上述规定的波长区域中的r元件、g元件和b元件的分光灵敏度,即,根据所使用的第一光学传感器的灵敏度特性,来调节在第一判定部中被使用的信号的强度或者灰度值的大小。加权系数能够成为比零大的任意正数。
10.根据本发明的第四方式,在第三方式的基础上,加权系数是1以上的值。根据该方式,在上述规定的波长区域中的r元件、g元件和b元件的分光灵敏度不足的情况下,为了得到所需的判定精度,能够使在第一判定部中被使用的信号放大或者使灰度值增大。
11.根据本发明的第五方式,在第一方式至第四方式中任一方式的基础上,光学式分选机具备朝向分选对象物放出具有可见波长区域内的波长的第二光的第二光源。光学式分选机进一步具备第二光学传感器,该第二光学传感器具有作为用于检测具有与红色对应的波长的光的光学元件的r元件、作为用于检测具有与绿色对应的波长的光的光学元件的g元件、和作为用于检测具有与蓝色对应的波长的光的光学元件的b元件。光学式分选机进一步具备第二判定部,该第二判定部基于在从第二光源放出了第二光时经由第二光学传感器而取得的信号来进行异物及/或不合格品的判定。根据该方式,能够进行基于可见光的判定和基于不可见光的判定双方。第一光源和第二光源也可以是朝向分选对象物放出具有不可见波长区域内的波长的第一光与具有可见波长区域内的波长的第二光的一个一体的光源。
12.根据本发明的第六方式,在第五方式的基础上,光学式分选机进一步具备:第一光学滤波器,其配置于向第一光学传感器入射的光的光路上,对具有可见波长区域内的波长的光进行截止;以及第二光学滤波器,其配置于向第二光学传感器入射的光的光路上,对具有不可见波长区域内的波长的光进行截止。根据该方式,即便第一光源与第二光源同时点亮,第一光学传感器也能够仅检测具有不可见波长区域内的波长的光,第二光学传感器也能够仅检测具有可见区域内的波长的光。即,能够一起进行可见光的检测与不可见光的检测,因此是高效的。例如,在光学式分选机是滑槽式的情况下,能够在使分选对象物从滑槽落下一次的期间进行可见光的检测与不可见光的检测。
13.根据本发明的第七方式,在第六方式的基础上,第二光学传感器具有与第一光学传感器相同的规格。根据该方式,第一光学传感器以及第二光学传感器是相同规格,因此能够简化光学式分选机的制造阶段中的部件采购。其结果,能够降低制造成本。
14.根据本发明的第八方式,在第一方式至第四方式中任一方式的基础上,光学式分选机具备:第二光源,其朝向分选对象物放出具有可见波长区域内的波长的第二光;以及第
二判定部,其基于在从第二光源放出了第二光时由该第一光学传感器取得的信号来进行异物及/或不合格品的判定。根据该方式,能够进行基于可见光的判定与基于不可见光的判定双方。并且,可见光的检测与不可见光的检测双方能够共用第一光学传感器,因此与单独地设置可见光用的光学传感器和不可见光用的光学传感器的情况相比,能够减少光学传感器的数量。其结果,能够降低制造成本。
15.根据本发明的第九方式,在第八方式的基础上,第一光学传感器构成为能够取得第一光源与第二光源交替点亮由此相对于一个分选对象物放出第一光且不放出第二光时的信号、和不放出第一光且放出第二光时的信号双方。根据该方式,能够一起进行可见光的检测与不可见光的检测,因此是高效的。
附图说明
16.图1是表示本发明的第一实施方式的光学式分选机的简要结构的示意图。
17.图2是表示第一光学传感器以及第二光学传感器各自的r元件、g元件和b元件的分光灵敏度特性的一个例子的图表。
18.图3是表示第二实施方式的光学式分选机的简要结构的示意图。
19.图4是表示第一光源以及第二光源的点亮时机的时序图。
20.图5是表示一个分选对象物与扫描编号的关系的说明图。
21.图6是表示第三实施方式的光学式分选机的简要结构的示意图。
具体实施方式
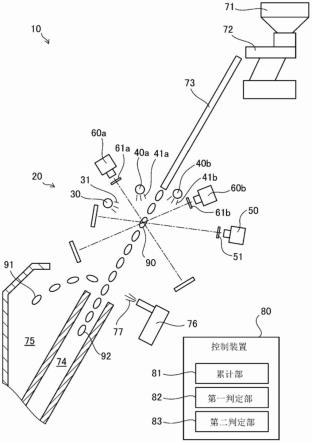
22.图1是表示作为本发明的第一实施方式的光学式分选机(以下,简称为分选机)10的简要结构的示意图。在本实施方式中,分选机10被使用为用于从作为分选对象物的米中分选异物(例如,小石子、泥、玻璃片等)以及不合格品(例如,未成熟粒、着色粒等)。其中,分选对象物不限于米,也可以是任意的粒状物(例如,除米以外的谷物、塑料等)。
23.如图1所示,分选机10具备:光学检测部20、存积箱71、送料器72、滑槽73、合格品排出槽74、不合格品排出槽75、喷射器76以及控制装置80。控制装置80控制分选机10的全部动作。控制装置80也作为累计部81、第一判定部82、第二判定部83发挥功能。控制装置80的功能可以通过cpu执行规定的程序来实现,也可以通过专用电路来实现。累计部81、第一判定部82以及第二判定部83的至少一部分也可以通过一体的一个装置来实现。例如,第一判定部82以及第二判定部83也可以是由一个cpu实现的两个功能。或者,累计部81、第一判定部82以及第二判定部83也可以分别作为单独的装置而被实现。之后详述控制装置80的功能。
24.存积箱71暂时存积分选对象物(以下,简称为对象物)90。送料器72将存积于存积箱71的对象物90向滑槽73上供给。光学检测部20对从滑槽73滑落的对象物90照射光,检测与对象物90相关联的光(具体地,是透过了对象物90的透过光及/或被对象物90反射的反射光)。该检测结果被输入控制装置80。控制装置80基于该检测结果判定对象物90是合格品(即,品质相对高的米粒),还是异物(即,非米粒的异物),或是不合格品(即,品质相对低的米粒)。该判定针对各个对象物90进行。
25.在判定为对象物90是异物或者不合格品的情况下,喷射器76朝向该对象物90喷射空气77。由此,对象物90被吹飞,而脱离从滑槽73开始的落下轨道,并被引导至不合格品排
出槽75。另一方面,在判定为对象物90是合格品的情况下,不喷射空气77。因此,被判定为是合格品的对象物90不改变落下轨道,而被引导至合格品排出槽74。
26.以下,对光学检测部20以及控制装置80的详细进行说明。如图1所示,光学检测部20具备:第一光源30、第二光源40a、40b、第一光学传感器50、第二光学传感器60a、60b、第一光学滤波器51以及第二光学滤波器61a、61b。在本实施方式中,第一光学传感器50是通用的彩色ccd传感器。在本实施方式中,第一光学传感器50是线传感器,但也可以是区域传感器。
27.第一光学传感器50具备用于检测具有与红色对应的波长的光的光学元件(以下,称为r元件)、用于检测具有与绿色对应的波长的光的光学元件(以下,称为g元件)、和用于检测具有与蓝色对应的波长的光的光学元件(以下,称为b元件)。r、g、b分别意味着rgb颜色空间的r、g、b。这些光学元件各自具备聚光透镜、滤色器和光电转换元件。各个滤色器具有使与应检测的光的颜色(例如,如果是r元件则为红色)对应的波长的光透过而不使其他波长的光透过的特性。代替滤色器,也可以使用分色棱镜等分光器。
28.图2示出了第一光学传感器50的r元件、g元件和b元件的分光灵敏度特性的一个例子。如图示那样,三种元件各自在可见波长区域具有分光灵敏度的峰值。可见波长区域例如是400nm以上、760nm以下的波长的区域。更具体而言,r元件在620nm附近具有分光灵敏度的峰值。g元件在520nm附近具有分光灵敏度的峰值。b元件在470nm附近具有分光灵敏度的峰值。
29.这些元件各自在不可见波长区域(即,除可见波长区域以外的波长区域)中的规定的波长范围内也具有非零的分光灵敏度。例如,在图2所示的例子中,r元件、g元件和b元件分别相对于850nm的波长的光(更具体地,是近红外光)具有0.35左右的相对灵敏度。
30.在本实施方式中,第二光学传感器60a、60b具有与第一光学传感器50相同的规格。因此,第二光学传感器60a、60b具备与第一光学传感器50相同规格的r元件、g元件和b元件,这些元件具有图2中例示出的分光灵敏度特性。
31.第一光源30朝向对象物90放出第一光31。第一光31具有上述的规定的波长范围(即,第一光学传感器50的r元件、g元件和b元件具有非零的分光灵敏度的不可见波长区域的波长范围)内的波长。在本实施方式中,第一光源30是近红外光源。因此,将第一光31也称为近红外光31。第一光源30的输出峰值位于不可见波长区域内(在本实施方式中为850nm的波长处)。在本实施方式中,第一光源30是led,但也可以使用其他任意的发光元件(例如卤素灯)。第一光31不但包含具有不可见波长区域的波长的光,而且也可以还包含具有可见波长区域的波长的光。
32.第二光源40a朝向对象物90放出第二光41a。第二光41a具有可见波长区域内的波长。因此,将第二光41a也称为可见光41a。第二光源40a的输出峰值位于可见波长区域内。在本实施方式中,第二光源40a是能够分别放出红色、绿色以及蓝色的光的所谓的彩色led。其中,第二光源40a也可以是其他任意的发光元件(例如卤素灯)。第二光源40b具有与第二光源40a相同的规格,朝向对象物90放出具有可见波长区域内的波长的第二光41b(也称为可见光41b)。第二光41a、41b不但包含具有可见波长区域的波长的光,而且也可以还包含具有不可见波长区域的波长的光。
33.第一光学滤波器51配置于向第一光学传感器50入射的光的光路上。第一光学滤波器51对具有可见波长区域内的波长的光进行截止。即,具有不可见波长区域(在本实施方式
中,为近红外线波长区域)的波长的光透过第一光学滤波器51,但具有可见波长区域内的波长的光不透过第一光学滤波器51。因此,第一光学传感器50能够仅检测近红外光。
34.第二光学滤波器61a、61b分别配置于向第二光学传感器60a、60b入射的光的光路上。第二光学滤波器61a、61b对具有不可见波长区域内的波长的光进行截止。即,具有可见波长区域内的波长的光透过第二光学滤波器61a、61b,但具有不可见波长区域(在本实施方式中,为近红外线波长区域)的波长的光不透过第二光学滤波器61a、61b。因此,第二光学传感器60a、60b能够仅检测可见光。
35.如图1所示,第一光源30、第二光源40a以及第二光学传感器60a相对于对象物90的移送路径(换言之,从滑槽73开始的落下轨迹)配置于一侧(也称为前侧)。另一方面,第二光源40b、第一光学传感器50以及第二光学传感器60b相对于对象物90的移送路径配置于另一侧(也称为后侧)。
36.后侧的第一光学传感器50对从前侧的第一光源30放出并透过对象物90且进一步透过了第一光学滤波器51的近红外光31进行检测。前侧的第二光学传感器60a对从前侧的第二光源40a放出并被对象物90反射且透过了第二光学滤波器61a的可见光41a、和从后侧的第二光源40b放出并透过对象物90且进一步透过了第二光学滤波器61a的可见光41b进行检测。后侧的第二光学传感器60b对从后侧的第二光源40b放出并被对象物90反射且透过了第二光学滤波器61b的可见光41b、和从前侧的第二光源40a放出并透过对象物90且进一步透过了第二光学滤波器61b的可见光41a进行检测。
37.众所周知,第一光学传感器50以及第二光学传感器60a、60b对一个对象物90进行多次扫描。通过合成在各扫描中得到的图像,取得该一个对象物90的整体图像。在本实施方式中,第一光源30以及第二光源40a、40b在第一光学传感器50以及第二光学传感器60a、60b的全部的扫描期间始终被点亮。其中,第一光源30以及第二光源40a、40b的点亮方式不特别限定。
38.第一光学传感器50以及第二光学传感器60a、60b的输出即检测出的表示光的强度的模拟信号被ac/dc转换器(省略图示)转换成数字信号。该数字信号(换言之,与模拟信号对应的灰度值)被输入控制装置80。
39.在控制装置80中,基于与对象物90相关联的可见光41a、41b进行异物及/或不合格品的判定,并且基于与对象物90相关联的近红外光31进行异物及/或不合格品的判定。首先,对基于与对象物90相关联的可见光41a、41b的判定进行说明。第二判定部83基于经由第二光学传感器60a、60b而得到的模拟信号(换言之,使用数字信号表示的灰度值),来判定对象物90是合格品,还是异物或不合格品。更具体而言,第二判定部83通过对经由第二光学传感器60a、60b的r元件、g元件和b元件而得到的r灰度值、g灰度值和b灰度值与预先决定的阈值进行比较,来进行异物及/或不合格品的判定。在该判定方法中,能够采用公知的任意的判定方法。
40.接下来,对基于与对象物90相关联的近红外光31的判定进行说明。在该判定中,首先,累计部81对经由第一光学传感器50的r元件、g元件和b元件而得到的r灰度值、g灰度值和b灰度值进行累计,并根据下式(1)计算累计值iv。在下式(1)中,r、g、b分别表示r灰度值、g灰度值以及b灰度值。另外,a、b、c是加权系数,分别设定为比0大的值。该累计以由第一光学传感器50得到的图像数据的像素单位来进行。
41.iv=ar bg cb
…
(1)
42.在本实施方式中,设定为a=b=c=1。即,累计值iv是将经由第一光学传感器50的r元件、g元件以及b元件得到的r灰度值、g灰度值以及b灰度值单纯相加而得的值。如图2所示,第一光学传感器50的r元件、g元件以及b元件分别相对于从第一光源30放出的850nm波长的光(近红外光31)具有0.35左右的相对灵敏度。若将这些相对灵敏度相加,则成为1.05(=0.35 0.35 0.35)。因此,累计值iv具有与在第二光学传感器60a、60b的r元件、g元件以及b元件分别检测出和其峰值灵敏度一致的波长的光时得到的灰度值的大小相同程度的大小。
43.若这样计算累计值iv,则第一判定部82基于累计值iv判定对象物90是合格品,还是异物或不合格品。更具体而言,第一判定部82对累计值iv与预先决定的阈值进行比较,由此进行异物及/或不合格品的判定。在该判定方法中,能够采用公知的任意的判定方法。
44.根据上述的分选机10,通过具备在可见波长区域具有分光灵敏度的峰值的r元件、g元件和b元件的第一光学传感器50,检测与对象物90相关联的近红外光31。换言之,不使用具备在不可见波长区域具有分光灵敏度的峰值的光学元件的光学传感器,就能够检测近红外光31。通常,具备在可见波长区域具有分光灵敏度的峰值的r元件、g元件以及b元件的光学传感器与具备在不可见波长区域具有分光灵敏度的峰值的元件的光学传感器相比非常廉价。因此,如分选机10那样,将具备在可见波长区域具有分光灵敏度的峰值的r元件、g元件以及b元件的第一光学传感器50使用为用于检测近红外光31,由此能够降低分选机10的制造成本。第一光学传感器50的近红外线波长区域中的分光灵敏度比其可见波长区域中的分光灵敏度小,但在异物及/或不合格品的判定中,使用对r灰度值、g灰度值以及b灰度值进行累计而得的累计值iv。即,使用于判定的灰度值通过累计而被增大。因此,也能够抑制因灵敏度不足而引起的判定精度的降低。
45.并且,虽来自r元件、g元件以及b元件的输出信号可能包含随机的噪声,但通过对r灰度值、g灰度值以及b灰度值进行累计,能够产生噪声彼此相互抵消的现象,因此与通过仅对r灰度值、g灰度值以及b灰度值中的任一个乘以规定的系数来单纯地使其增大的情况相比,噪声难以被放大。因此,也能够抑制因噪声的放大而引起的判定精度的降低。
46.另外,分选机10具备第一光学滤波器51以及第二光学滤波器61a、61b,因此即使同时点亮了第一光源30与第二光源40a、40b,第一光学传感器50也能够仅检测与对象物90相关联的近红外光31,第二光学传感器60a、60b也能够仅检测与对象物90相关联的可见光41a、41b。因此,能够在使对象物90从滑槽73落下一次的期间进行可见光的检测与不可见光的检测。
47.另外,在分选机10中,第一光学传感器50具有与第二光学传感器60a、60b相同的规格。因此,能够简化分选机10的制造阶段中的部件采购。其结果,能够降低制造成本。
48.上述的实施方式能够变形成各种方式。例如,在式(1)中,加权系数a、b、c也可以设定为除1以外的值。为了得到所需的判定精度,加权系数a、b、c能够根据与近红外光31的波长区域一致的波长区域中的r元件、g元件以及b元件的分光灵敏度,即根据第一光学传感器50的灵敏度特性设定为比零大的任意值。例如,在第一光学传感器50相对于近红外光31的灵敏度不足的情况下,若设定为a=b=c=1,则存在无法得到用于获得所需的判定精度的充分大的累计值iv。在这种情况下,也可以将加权系数a、b、c设定为比1大的值,而使累计值
iv增大。在该情况下,如果将加权系数a、b、c设定为比1大的相同值,则与上述实施方式相同,能够适当地得到抵消噪声的效果。或者,在过剩地得到第一光学传感器50相对于近红外光31的灵敏度的情况下(换言之,在累计值iv超过灰度值的最大值的情况下(所谓的饱和状态)),也可以将加权系数a、b、c设定为比1小的值。在该情况下,也可以将加权系数a、b、c设定为相同值。或者,a、b、c也可以以a、b、c中的两个以上不是0为条件分别设定为0以上的值。换言之,a、b、c中的任一个也可以为0。例如,在r元件以及g元件具有足够进行判定的灵敏度的情况下,也可以设为a=1,b=1,c=0。
49.或者,代替对r灰度值、g灰度值以及b灰度值进行累计,也可以通过加法电路对从r元件、g元件以及b元件输出的模拟信号进行累计来使其放大。或者,为了计算累计值iv,也可以仅累计r灰度值、g灰度值以及b灰度值中的两个灰度值。
50.或者,第一光学传感器50可以仅配置于前侧,也可以配置于前侧与后侧双方。相同地,第一光源30可以仅配置于后侧,也可以配置于前侧与后侧双方。
51.或者,代替第一光源30以及第二光源40a,也可以使用放出具有不可见波长区域的波长的光与具有可见波长区域的波长的光的一个光源(例如卤素灯)。
52.图3是表示作为本发明的第二实施方式的分选机100的简要结构的示意图。分选机100仅在不具备第一光学滤波器51以及第二光学滤波器61a、61b,和代替控制装置80而具备控制装置180这两点与第一实施方式不同。以下,针对分选机100,仅对与第一实施方式不同的点进行说明。
53.控制装置180在以间歇地点亮的方式控制第一光源30以及第二光源40a、40b这点与控制装置80不同。图4是表示第一光源30以及第二光源40a、40b的点亮时机的时序图。图5是表示一个对象物90与第一光学传感器50以及第二光学传感器60a、60b的扫描编号(表示是第几次扫描的数字)的关系的说明图。如图5所示,在本实施方式中,针对一个对象物90通过进行8次(为了简化说明,例示为比实际少的次数)扫描来取得图像数据。图5所示的数字1~8表示取得相应的区域的图像数据的扫描的编号。例如,被标注“1”的区域表示通过第一次扫描来取得图像数据。
54.如图4所示,第一光源30仅在具有奇数的扫描编号的扫描期间被点亮(在图中表示为on),在具有偶数的扫描编号的扫描期间熄灭(在图中表示为off)。另一方面,第二光源40a、40b仅在具有偶数的扫描编号的扫描期间被点亮,在具有奇数的扫描编号的扫描期间熄灭。此时,第二光源40a、40b同时点亮或者熄灭。即,第一光源30与第二光源40a、40b交替点亮。换言之,第一光源30与第二光源40a、40b相互排他地被点亮。
55.通过这种结构,在第一光学传感器50中,仅在具有奇数的扫描编号的扫描期间,检测从第一光源30放出的近红外光31,在第二光学传感器60a、60b中,仅在具有偶数的扫描编号的扫描期间,检测从第二光源40a、40b放出的可见光41a、41b。因此,累计部81以及第一判定部82仅使用在具有奇数的扫描编号的扫描期间由第一光学传感器50取得的信号(在图5中用剖面线表示由该信号得到的图像的区域),进行在第一实施方式中说明的累计处理以及判定处理。相同地,第二判定部83仅使用在具有偶数的扫描编号的扫描期间由第二光学传感器60a、60b取得的信号,进行在第一实施方式中说明的判定处理。
56.根据该分选机100,虽然第一光学传感器50以及第二光学传感器60a、60b的分辨率与第一实施方式相比降低到一半,但近红外光31与可见光41a、41b不会干涉。因此,在使对
象物90从滑槽73落下一次的期间,第一光学传感器50能够仅检测与对象物90相关联的近红外光31,第二光学传感器60a、60b能够仅检测与对象物90相关联的可见光41a、41b。并且,由于不需要第一光学滤波器51以及第二光学滤波器61a、61b,所以能够进一步降低制造成本。
57.图6是表示作为本发明的第三实施方式的分选机200的简要结构的示意图。分选机200仅在不具备第二光学传感器60b,和代替控制装置180而具备控制装置280这两点与第二实施方式不同。以下,针对分选机200,仅对与第二实施方式不同的点进行说明。
58.控制装置280以与控制装置180相同的方式(即,以图4所示的方式)以间歇地点亮的方式控制第一光源30以及第二光源40a、40b。在本实施方式中,在后侧不设置第二光学传感器60b,因此在后侧配置的第一光学传感器50也起到第二光学传感器60b的作用。即,第一光学传感器50在具有奇数的扫描编号的扫描期间,检测从第一光源30放出的近红外光31,在具有偶数的扫描编号的扫描期间,检测从第二光源40a、40b放出的可见光41a、41b。
59.因此,累计部81以及第一判定部82与第二实施方式相同,仅使用在具有奇数的扫描编号的扫描期间由第一光学传感器50取得的信号,来进行在第一实施方式中说明的累计处理以及判定处理。另一方面,第二判定部83使用在具有偶数的扫描编号的扫描期间由第二光学传感器60a取得的信号和在具有奇数的扫描编号的扫描期间由第一光学传感器50取得的信号,来进行在第一实施方式中说明的判定处理。
60.根据该分选机200,近红外光31的检测与可见光41a、41b的检测双方能够共用第一光学传感器50,因此与第二实施方式相比,能够使制造成本降低第二光学传感器60b的费用。并且,与第二实施方式相同,在使对象物90从滑槽73落下一次的期间,能够进行可见光的检测与不可见光的检测。其中,也可以使对象物90落下两次来进行可见光的检测与不可见光的检测。例如,也可以是,在第一次落下时,仅第一光源30连续地点亮,通过第一光学传感器50检测近红外光31,在第二次落下时,仅第二光源40a、40b连续地点亮,通过第一光学传感器50检测可见光41a、41b。
61.以上,对本发明的几个实施方式进行了说明,但上述发明的实施方式用于容易理解本发明,不对本发明进行限定。本发明能够不脱离其主旨地进行变更、改进,并且本发明包括其等同物。另外,在能够解决上述课题的至少一部分的范围或者起到效果的至少一部分的范围内,能够进行权利要求书以及说明书所记载的各构成要素的组合或省略。
62.例如,代替使用r元件、g元件和b元件分别在近红外线波长区域具有非零的分光灵敏度的第一光学传感器50,也可以使用仅r元件、g元件和b元件中的两种元件在近红外线波长区域具有非零的分光灵敏度的第一光学传感器。即便在该情况下,也对经由这两种元件而取得的信号或者灰度值进行累计,由此能够抑制因灵敏度不足而引起的判定精度的降低。
63.另外,代替使用r元件、g元件和b元件分别在近红外线波长区域具有非零的分光灵敏度的第一光学传感器50,也可以使用r元件、g元件和b元件分别在可见波长区域具有分光灵敏度的峰值,并且r元件、g元件和b元件中的至少两个在除近红外线波长区域以外的不可见波长区域(具体地,为远红外线波长区域或者紫外线波长区域)具有非零的分光灵敏度的第一光学传感器。在该情况下,代替第一光源30,使用具有远红外线波长区域或者紫外线波长区域的波长的第一光源。另外,根据从所使用的第一光源放出的光的波长范围,第一光学滤波器51的滤波特性也可以适当变更。通过这种结构,也能够确保所需的判定精度,且使用
廉价的光学传感器来检测远红外线波长区域或者紫外线波长区域。
64.另外,作为第一光学传感器50及/或第二光学传感器60a、60b,代替彩色ccd传感器,也可以使用彩色cmos传感器等其他形式的光学传感器。
65.附图标记说明
66.10、100、200...分选机;20...光学检测部;30...第一光源;31...第一光(近红外光);40a、40b...第二光源;41a、41b...第二光(可见光);50...第一光学传感器;51...第一光学滤波器;60a、60b...第二光学传感器;61a、61b...第二光学滤波器;71...存积箱;72...送料器;73...滑槽;74...合格品排出槽;75...不合格品排出槽;76...喷射器;77...空气;80、180、280...控制装置;81...累计部;82...第一判定部;83...第二判定部;90...对象物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。