1.本发明涉及一种用于连接电导体的连接装置。本发明还涉及一种连接端子以及一种电子设备。
背景技术:
2.这种连接装置通常具有构造成夹臂弹簧的夹紧弹簧,该夹紧弹簧具有保持臂和夹紧臂,其中被引入到该连接装置中的导体可以借助该夹紧弹簧的夹紧臂夹紧到电流条上。如果尤其是将柔性的导体夹紧,则必须在引入导体之前就借助于操纵元件将夹紧弹簧转移到释放位置中并因此操纵,以便使夹紧弹簧或夹紧臂远离电流条枢转,由此可以将导体引入到电流条与夹紧弹簧之间的中间空间中。仅在刚性的并且因此稳定的导体的情况下,导体才能将足够的力施加到夹紧弹簧或夹紧弹簧的夹紧臂上,以便能够使夹紧臂远离电流条枢转,而不必为此由使用者操纵该操纵元件。在柔性的导体的情况下,使用者必须首先通过操纵该操纵元件将该夹紧弹簧从电流条枢转开,以便能够插入该柔性的导体。为了夹紧已插入的导体,必须再一次由使用者手动操纵该操纵元件,以便将夹紧弹簧从释放位置转移到夹紧位置。使用者对操纵元件的操纵使得使用者难以安装或连接该导体,因为操作麻烦进而也增加了时间耗费。
技术实现要素:
3.因此,本发明的目的在于,提供一种连接装置以及一种连接端子和一种电子设备,其能够简化特别是柔性的导体的连接。
4.根据本发明,该目的利用独立权利要求的特征来解决。本发明的有利的设计方案和有利的改进方案在从属权利要求中给出。
5.根据本发明的连接装置具有:电流条;夹紧弹簧,该夹紧弹簧具有夹紧臂,该夹紧臂能够转移到夹紧位置和释放位置中;构造在电流条的一个区段和夹紧弹簧的夹紧臂之间的导体连接室;可移动地布置的引导元件,该引导元件与夹紧弹簧的夹紧臂作用连接,其中夹紧臂能够借助于引导元件保持在释放位置中;和触发元件,该触发元件在夹紧弹簧的释放位置中与引导元件嵌接。在待连接的导体引入到导体连接室中时,触发元件可由该导体操纵,使得触发元件与引导元件脱离嵌接,并且引导元件可通过夹紧臂的弹簧力移动,使得夹紧臂转移到夹紧位置中,以相对于电流条夹紧导体。
6.借助于根据本发明的连接装置,现在也可以在不手动操纵例如操纵元件或者不借助于工具的情况下连接柔性导体并且将其相对于电流条夹紧。夹紧弹簧优选构造为夹臂弹簧,其具有保持臂和构造为能相对于保持臂枢转的夹紧臂。通过夹紧臂的枢转运动,该夹紧臂可以转移到释放位置和夹紧位置中,在释放位置中,夹紧臂与电流条间隔开地布置,并且待连接的导体能够引入到由此在电流条与夹紧臂之间构成的导体连接室中或者可以从其中导出,在夹紧位置中,夹紧臂可以贴靠在电流条上或所连接的导体上,以便将导体相对于电流条夹紧。连接装置具有尤其可水平移动地支承的引导元件,该引导元件优选不仅在夹
紧弹簧的夹紧臂的释放位置中、而且在其夹紧位置中都与夹紧弹簧作用连接,这意味着,夹紧臂通过与引导元件作用连接而跟随引导元件的移动运动并且由此跟随其位置。通过使引导元件压靠夹紧臂,引导元件使夹紧臂克服其弹簧力保持在释放位置。为了能够将引导元件保持在该位置中,引导元件在夹紧弹簧的夹紧臂的释放位置中与触发元件嵌接。如果触发元件与引导元件嵌接,则引导元件的移动运动是不可能的或者说被阻止。通过触发元件与引导元件以及引导元件与夹紧弹簧的夹紧臂在夹紧臂的释放位置中的作用连接或耦合,夹紧臂可以在没有附加的手动操纵的情况下保持在该释放位置中,从而尤其是柔性的导体可以引入到在电流条与夹紧弹簧之间由此开放的导体连接室中。触发元件可以具有指向导体连接室的方向的压力面,该压力面与导体向连接装置的引入区域对准地布置或者与导体连接室对准地布置,从而导体在引入到连接装置中时碰到触发元件的压力面,由此可以将压力从导体施加到触发元件上。通过借助于导体将压力施加到压力面上并且因此施加到触发元件上,触发元件例如能够进行沿导体的引入方向的方向进行枢转运动或翻转运动,从而触发元件能够在导体的引入方向上从引导元件枢转开或翻转开。通过触发元件的枢转运动,触发元件可以与引导元件脱离嵌接,从而引导元件又可以自由移动并且由此引导元件可以仅仅通过夹紧臂的弹簧力在没有手动辅助的情况下这样移动,使得夹紧臂可以从释放位置转移到夹紧位置中。通过这种特殊的机构,可以特别简单地仅通过导体的引入运动来连接柔性的导体,而使用者不必操纵其它元件、例如操纵元件来释放夹紧弹簧并且将其从释放位置转移到夹紧位置。这使得连接装置的操作变得容易并且节省了连接导体时的时间。触发元件优选是与夹紧弹簧、电流条和引导元件分开构造的元件或构件。但也可能的是,触发元件与夹紧弹簧、尤其与夹紧弹簧的保持臂连接。触发元件在此也可以与夹紧弹簧、尤其与夹紧弹簧的保持臂一体式地构造。在触发元件与夹紧弹簧连接的情况下,触发元件优选与夹紧弹簧连接为使得触发元件能够相对于夹紧弹簧的保持臂枢转。触发元件优选在电流条的能够实现导体夹紧的区段和夹紧弹簧之间的区域上延伸,使得触发元件能够朝向一侧限定导体连接室。引导元件可以构造为推移元件。
7.为了能够在引导元件和夹紧弹簧的夹紧臂之间构成作用连接,可以设定,引导元件具有至少一个弹簧贴靠棱边,夹紧臂可以贴靠在所述弹簧贴靠棱边上。弹簧贴靠棱边能够构成为使得不仅在释放位置中、而且在夹紧位置中,夹紧臂或夹紧臂的至少一部分能够贴靠在弹簧贴靠棱边上。弹簧贴靠棱边例如可以构造在引导元件的凸肩上。
8.为了能够实现引导元件和夹紧弹簧的夹紧臂的均匀的引导,能够在引导元件上构成两个这种弹簧贴靠棱边,使得夹紧臂能够经由两个这种弹簧贴靠棱边在引导元件上引导。两个弹簧贴靠棱边优选彼此平行地在引导元件上延伸。
9.在这种设计方案中可能的是,夹紧臂具有两个分别布置在具有夹紧棱边的主区段的侧面的滑动区段,并且引导元件具有两个彼此间隔布置的弹簧贴靠棱边,其中,第一滑动区段可以贴靠在第一弹簧贴靠棱边上,并且第二滑动区段可以贴靠在第二弹簧贴靠棱边上。这两个滑动区段优选分别具有比夹紧臂的主区段更短的长度。主区段和两个滑动区段优选彼此平行地延伸。两个滑动区段优选分别弯曲地构造,从而它们可以分别构成滑板,其可以分别沿着一个弹簧贴靠棱边滑动。相反,主区段优选构造为直的。
10.引导元件优选能够移动,使得引导元件的移动运动可横向于待连接的导体向导体连接室的引入方向进行。由此,能够实现特别紧凑的构造,由此所述连接装置的特征能够在
于减小的结构空间。
11.为了能够借助于引入到导体连接室中的导体将触发元件从引导元件松开进而与引导元件脱离嵌接,触发元件可相对于引导元件能够翻转地支承。因此,触发元件可以翘板式地构造。如果待连接的导体被压靠在触发元件上,则触发元件可以沿导体的引入方向翻转,以便与引导元件脱离嵌接,从而释放引导元件,使得引导元件可以再次自由移动。
12.为了能够在夹紧弹簧的夹紧臂的释放位置中构成触发元件与引导元件的嵌接,触发元件能够具有至少一个侧凹部,所述侧凹部在夹紧弹簧的夹紧臂的释放位置中能够与引导元件的至少一个卡锁凸起卡锁。由此,当夹紧弹簧的夹紧臂处于释放位置中时,可以在引导元件和触发元件之间构成卡锁连接。优选地,触发元件具有两个侧凹部并且引导元件优选具有两个卡锁凸起,从而可以在引导元件和触发元件之间构成双重作用的卡锁。如果设置两个侧凹部,则它们优选形成在所述触发元件的两个相互平行延伸的侧面上。
13.优选地,可进一步规定,引导元件具有两个彼此平行布置的纵向侧壁,所述纵向侧壁在第一侧和与第一侧相对的第二侧上限定导体连接室。因此,当待连接的导体被引入导体连接室中时,引导元件也可以构成该导体的引导部。这两个纵向侧壁可以避免导体的错误插接。因此导体连接室可以在其两侧通过引导元件限定、并在其另两侧通过电流条和通过夹紧弹簧的夹紧臂限定。
14.连接装置还可以具有操纵元件,借助该操纵元件,引导元件可以为了使夹紧弹簧的夹紧臂从夹紧位置移动到释放位置中而移动。操纵元件优选能够构成为使得所述操纵元件将压力施加到引导元件上,以便使所述引导元件抵抗夹紧弹簧的夹紧臂的弹簧力移动,使得在达到夹紧臂的释放位置时引导元件能够与触发元件嵌接。通过移动运动,引导元件可以将拉力施加到夹紧弹簧的夹紧臂上,以便将夹紧臂从夹紧位置转移到释放位置中。操纵元件优选可在横向于引导元件的移动运动方向定向的方向上运动。操纵元件优选可以纯平移运动。操纵元件的运动方向优选平行于导体向导体连接室中的引入方向定向。
15.引导元件可以具有滑动面,操纵元件可以沿着该滑动面引导。在滑动面上,操纵元件可以面状地贴靠在引导元件上。操纵元件能够通过滑动面沿着引导元件滑动并且由此将压力传递到引导元件上。
16.滑动面可以布置在引导元件的两个纵向侧壁之间或者布置在引导元件的端壁上。滑动面优选这样定向,即滑动面横向于两个纵向侧壁延伸。通过在两个纵向侧壁之间布置滑动面,操纵元件可以为了操纵引导元件而插入到由两个纵向侧壁和滑动面限定的自由空间中,其中,两个纵向侧壁可以构成用于操纵元件的引导辅助装置,以便可以防止操纵元件在沿着引导元件的滑动面引导时翻转。
17.滑动面可以构成斜面,该斜面可以与构造在操纵元件上的斜面共同作用。如果滑动面构造为斜面,则该斜面优选具有倾斜度。操纵元件的贴靠在滑动面上的面于是优选也构造为斜面,该斜面相对于操纵元件的在操纵元件的运动方向上延伸的纵向延伸倾斜地构造。滑动面的倾斜度和操纵元件的该面的倾斜度例如可以分别相对于操纵元件的操纵方向或者说相对于操纵元件的纵向延伸方向成30
°
至50
°
之间的角度构成。如果不仅滑动面、而且操纵元件的沿着滑动面滑动的面都构造为斜面,则在操纵元件沿着滑动面滑动时,操纵元件的垂直运动方向可以转换为引导元件的水平移动运动。
18.操纵元件优选布置为使得操纵元件恰好不伸入到导体连接室中,从而可以防止操
纵元件与所连接的导体的共同作用。优选地,夹紧弹簧、电流条和操纵元件这样布置,使得夹紧弹簧布置在电流条的夹紧待连接导体的区段和操纵元件之间。
19.此外,根据本发明的目的借助于一种连接端子、尤其是接线盒来解决,其具有至少一个如前所述的、构造和改进的连接装置。连接端子例如可以布置在电路板上。如果连接端子被设计为接线盒,则它可以被安排在支撑导轨上。
20.也可能的是,设置有连接端子装置,该连接端子装置可以具有多个彼此成排布置的连接端子,这些连接端子可以分别具有至少一个如前所述的、构造和改进的连接装置。
21.此外,根据本发明的目的的解决方案可以借助一种电子设备来实现,该电子设备可以具有至少一个如前所述的、构造和改进的连接装置和/或至少一个如前所述的、构造和改进的连接端子。
附图说明
22.下面参照附图根据优选的实施方式详细解释本发明。
23.附图示出了
24.图1示出了具有根据本发明的连接装置的连接端子的示意图,其中夹紧弹簧的夹紧臂处于夹紧位置,
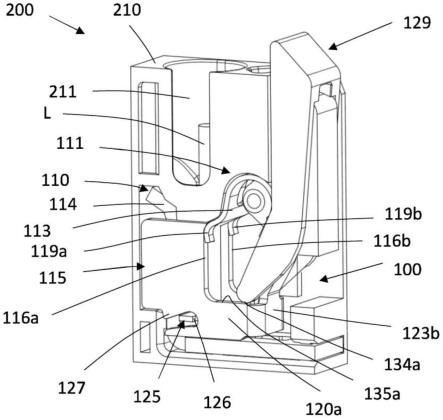
25.图2示出了图1中所示的、具有根据本发明的连接装置的连接端子的示意性剖视图,其中夹紧弹簧的夹紧臂处于夹紧位置,
26.图3示出了具有根据本发明的连接装置的连接端子的示意图,其中夹紧弹簧的夹紧臂处于释放位置,并且
27.图4示出了图3中所示的、具有根据本发明的连接装置的连接端子的示意性剖视图,其中夹紧弹簧的夹紧臂处于释放位置。
具体实施方式
28.图1示出了具有壳体210的连接端子200,该壳体可以由绝缘材料形成,其中,用于连接这里未示出的导体的连接装置100布置或容纳在壳体210中。
29.连接装置100具有电流条110和被构造成夹臂弹簧的夹紧弹簧111,如尤其也在图2中的剖视图中可看到的那样。夹紧弹簧111具有保持臂112和夹紧臂113。保持臂112保持在固定位置中,而夹紧臂113能相对于保持臂112枢转。通过夹紧臂113的枢转运动,该夹紧臂可以转移到如图1和图2所示的夹紧位置以及如图3和图4所示的释放位置。在夹紧位置中,夹紧臂113压靠在电流条110的区段114上或者说压靠在插入到连接装置100中的导体上,以便将该导体夹紧并连接到电流条110的区段114上。在释放位置中,夹紧臂113与电流条110的区段114间隔地定位,使得导体可以插入到由此在电流条110的区段114和夹紧臂113之间形成的自由空间中。
30.此外,连接装置100具有引导元件115。引导元件115尤其是相对于电流条110可移动地支承,使得引导元件115可以进行水平移动运动v。
31.借助引导元件115可以使夹紧弹簧111的夹紧臂113从夹紧位置转移到释放位置中并且保持在释放位置中。为此,引导元件115与夹紧弹簧111的夹紧臂113作用连接。
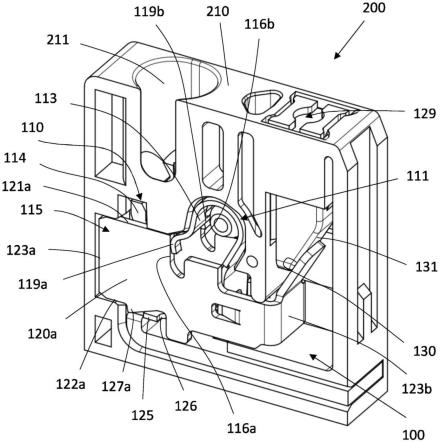
32.在这里所示的设计方案中,引导元件115具有两个相互平行设置的弹簧贴靠棱边
116a、116b,夹紧臂113贴靠在所述弹簧贴靠棱边上。
33.夹紧臂113具有主区段117,在其自由端部上构造有夹紧棱边118。在主区段117的侧面形成有两个滑动区段119a、119b,使得主区段117位于两个滑动区段119a、119b之间。两个滑动区段119a、119b贴靠在引导元件115的两个弹簧贴靠棱边116a、116b上,其中,滑动区段119a贴靠在弹簧贴靠棱边116a上并且滑动区段119b贴靠在弹簧贴靠棱边116b上。滑动区段119a、119b不仅在夹紧弹簧111的夹紧臂113的释放位置中、而且在夹紧位置中贴靠在弹簧贴靠棱边116a、116b上。
34.滑动区段119a、119b具有比主区段117更短的长度。滑动区段119a、119b被设计为弯曲的,从而它们形成滑板形状,借助于该滑板形状,滑动区段119a、119b在夹紧臂113转移到释放位置和夹紧位置时,能够沿着弹簧贴靠棱边116a、116b滑动,如特别是在图1和图3中可看到的。
35.两个弹簧贴靠棱边116a、116b构造在引导元件115的彼此对置的纵向侧壁120a、120b上。两个纵向侧壁120a、120b相互平行地布置。两个纵向侧壁120a、120b分别具有上棱边121a、121b和相对置的下棱边122a、122b。弹簧贴靠棱边116a、116b分别垂直于上棱边121a、121b延伸。弹簧贴靠棱边116a、116b从水平延伸的上棱边121a、121b出发向下朝引导元件115的水平延伸的下棱边122a、122b的方向延伸。
36.电流条110和夹紧弹簧111布置在引导元件115的两个纵向侧壁120a、120b之间。电流条110和夹紧弹簧111由引导元件115包围。
37.引导元件115还具有两个端壁123a、123b,它们相互平行地定向。两个端壁123a、123b横向于引导元件115的两个纵向侧壁120a、120b布置。
38.在电流条110的区段114和夹紧臂113之间形成导体连接室124,待连接的导体可以被引入到该导体连接室124中。导体连接室124在侧面由引导元件115的两个纵向侧壁120a、120b覆盖或界定,从而使得引导元件115也构成用于待连接的导体的引导部。
39.导体连接室124与形成在壳体210中的导体引入开口211对准地构造,通过该导体引入开口可以将待连接的导体引入到连接端子200的壳体210中。
40.连接装置100还具有触发元件125。触发元件125与导体引入开口211和导体连接室124对准地布置。触发元件125向下界定导体连接室124。
41.在夹紧弹簧111的夹紧臂113的释放位置中,触发元件125与引导元件115嵌接,如在图3和图4中可看到的那样,由此引导元件115保持在其位置中并且由此也通过夹紧臂113的弹簧贴靠棱边116a、116b和滑动区段119a、119b保持在其位置中,从而可以防止夹紧臂113从释放位置向夹紧位置的不期望的摆回。
42.触发元件125具有两个侧向布置的侧凹部126,所述侧凹部在夹紧弹簧111的夹紧臂113的释放位置中分别与引导元件115的一个卡锁凸起127a、127b嵌接,以便在引导元件115和触发元件125之间构成卡锁。卡锁凸起127a形成于纵向侧壁120a的下棱边122a上,并且卡锁凸起127b形成于纵向侧壁120b的下棱边122b上。
43.在夹紧位置中,触发元件125与引导元件115脱离嵌接,如在图1和图2中可看出的那样,从而引导元件115能自由移动。
44.触发元件125以能够相对于引导元件115倾斜的方式支承。
45.在将待连接的导体沿着引入方向e经由导体引入开口211引入到导体连接室124中
时,导体撞到触发元件125上,由此触发元件125相对于引导元件115翻转并且由此与引导元件115脱离嵌接,使得引导元件115又可以自由移动并且由此引导元件115可以仅仅通过夹紧臂113的弹簧力在没有手动辅助的情况下这样移动,使得夹紧臂113可以从释放位置转移到夹紧位置中。触发元件125具有指向导体连接室124方向的压力面128,该压力面与导体引入开口211对准地或者与导体连接室124对准地布置,从而导体在插入到连接装置100中时碰到触发元件125的压力面128,由此压力由导体施加到触发元件125上。通过借助于导体将压力施加到压力面128上并且由此施加到触发元件125上,触发元件125可进行沿导体的引入方向e的方向的枢转运动或倾斜运动,从而触发元件125可沿导体的引入方向e从引导元件115枢转开或翻转开。
46.当引导元件115与触发元件125脱离嵌接时,该引导元件115的移动运动v沿横向于待连接的导体向导体连接室124中的引入方向e的方向进行。
47.为了借助于引导元件115使夹紧臂113克服其弹簧力从夹紧位置返回到释放位置中,连接装置100具有操纵元件129。操纵元件129沿着操纵方向b可移动地支承,其中,操纵方向b平行于导体的引入方向e。操纵方向b横向于引导元件115的移动运动b延伸。
48.借助于操纵元件129,引导元件115可以被移动,使得夹紧弹簧111的贴靠引导元件115的夹紧臂113可以从夹紧位置转移到释放位置。在沿操纵方向b操纵该操纵元件129时,操纵元件129能够移动使得所述操纵元件将压力施加到引导元件115上,以便使引导元件115克服夹紧弹簧115的夹紧臂113的弹簧力移动,使得在达到夹紧臂113的释放位置时,引导元件115能够与触发元件125嵌接。通过引导元件115的这种移动运动v实现了夹紧臂113从夹紧位置到释放位置的枢转。
49.引导元件115具有以斜面的形式形成的滑动面130,操纵元件129可以沿着该滑动面被引导。滑动面130在这里所示的设计方案中成型在引导元件115的端壁123b上。滑动面130从端壁123b出发朝操纵元件129的方向延伸。滑动面129通过构造为斜面而倾斜地布置,从而滑动面129在此相对于引导元件115的端壁123b以130
°
至160
°
之间的角度延伸。
50.作为替代方案,也可以将滑动面130与端壁123b间隔开地布置在两个纵向侧壁120a、120b之间,从而使滑动面130直接连接在纵向侧壁120a、120b上。
51.操纵元件129也具有对应于滑动面130的倾斜度形成的斜面131。操纵元件129的斜面131面状地贴靠在滑动面130处,从而在沿操纵方向b操纵该操纵元件129时,斜面131可沿着滑动面130向下滑动,以便移动引导元件115。
52.操纵元件129邻近夹紧弹簧111的保持臂112布置。操纵元件129因此被布置在夹持弹簧111的后方。夹紧弹簧111布置在电流条110的区段114和操纵元件129之间。
53.附图标记说明
54.100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接装置
55.110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电流条
56.111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹紧弹簧
57.112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
保持臂
58.113
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹紧臂
59.114
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电流条的区段
60.115
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
引导元件
61.116a、116b
ꢀꢀꢀꢀꢀ
弹簧贴靠棱边
62.117
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
主区段
63.118
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹紧棱边
64.119a、119b
ꢀꢀꢀꢀꢀ
滑动区段
65.120a、120a
ꢀꢀꢀꢀꢀ
纵向侧壁
66.121a、121b
ꢀꢀꢀꢀꢀ
上棱边
67.122a、122b
ꢀꢀꢀꢀꢀ
下棱边
68.123a、123b
ꢀꢀꢀꢀꢀ
端壁
69.124
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导体连接室
70.125
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
触发元件
71.126
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
侧凹部
72.127a、127b
ꢀꢀꢀꢀꢀ
卡锁凸起
73.128
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
压力面
74.129
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
操纵元件
75.130
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑动面
76.131
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
斜面
77.200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接端子
78.210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壳体
79.211
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导体引入开口
[0080]vꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
移动运动
[0081]eꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
引入方向
[0082]bꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
操纵方向
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。