1.本发明涉及一种用于连接电导体的接线配置。本发明还涉及一种接线端子以及一种电子设备。
背景技术:
2.这类接线配置通常具有构建为支腿弹簧的夹箍弹簧,其具有保持脚和夹脚,其中插入此接线配置的导体可以借助于此夹箍弹簧的夹脚被抵向母线夹紧。如果特别是将柔性的导体夹紧,则在插入导体前即已需要借助于操纵元件将夹箍弹簧移入释放位置进而进行操纵,使得夹箍弹簧或夹脚背离电流条偏转,以便将导体插入位于电流条与夹箍弹簧之间的中间腔。仅当导体具备刚性故而稳定时,导体才能将足够的力施加至夹箍弹簧或夹箍弹簧的夹脚,从而使得夹脚背离电流条偏转,而无需使用者为此对操纵元件进行操纵。就柔性的导体而言,需要使用者首先通过对操纵元件进行操纵使得夹箍弹簧背离电流条偏转,以便将柔性的导体插入。在此过程中,操纵元件通常压向夹箍弹簧的夹脚,使得夹脚背离电流条偏转并释放出导体连接腔。
技术实现要素:
3.本发明的目的在于提供一种接线配置、一种接线端子以及一种电子设备,其中能够在连接导体时为使用者简化操作。
4.本发明用以达成上述目的的解决方案为独立权利要求的特征。本发明的优选构建方案和有利改进方案参阅从属权利要求。
5.本发明的接线配置具有:电流条;夹箍弹簧,其具有保持脚和夹脚,其中所述夹脚可以移入夹紧位置和释放位置;构建在所述电流条的一个区段与所述夹箍弹簧的夹脚之间的导体连接腔;可动地布置的导引元件,其与夹箍弹簧的夹脚处于作用性连接,其中所述夹脚可以借助于所述导引元件保持在所述释放位置;以及可偏转地支承的操纵元件,所述导引元件可以借助于所述操纵元件移动以将所述夹箍弹簧的夹脚从所述夹紧位置移入所述释放位置。其中,所述夹箍弹簧布置在电流条的区段与操纵元件之间。
6.所述夹箍弹簧优选构建为支腿弹簧,其具有保持脚和可相对所述保持脚偏转的夹脚。通过所述夹脚的偏转运动,这个夹脚能够移入释放位置和夹紧位置,在所述释放位置中,夹脚是以与电流条间隔一定距离的方式布置,并且待连接的导体是可插入由此形成于电流条与夹脚之间的导体连接腔或者是可从这个导体连接腔移出,在所述夹紧位置中,夹脚能够抵靠在电流条上或者抵靠在所连接的导体上,从而将导体抵向电流条夹紧。所述接线配置具有特别是可水平移动地支承的导引元件,该导引元件优选在夹箍弹簧的夹脚的释放位置和打开位置上均与夹箍弹簧处于作用性连接,这表示,夹箍弹簧可以通过与导引元件的作用性连接而跟随导引元件的位移运动进而跟随其位置。导引元件将夹脚反向于其弹力保持在释放位置,具体方式是,导引元件压向夹脚。导引元件可以构建为滑块元件。所述接线配置还具有可偏转地支承的操纵元件,导引元件可以借助于该操纵元件移动以将夹箍
弹簧的夹脚从夹紧位置移入释放位置。操纵元件如此地构建,使得操纵元件能够通过操纵元件的偏转运动将按压力施加至导引元件,以使得这个导引元件反向于夹箍弹簧的夹脚的弹力移动,直至夹脚到达释放位置。通过导引元件的位移运动,这个导引元件能够将拉力施加至夹箍弹簧的夹脚,以使得夹脚从夹紧位置移入释放位置。操纵元件优选可以朝某个方向偏转,该方向反向于夹脚从夹紧位置至释放位置的偏转方向定向。如果操纵元件的偏转运动顺时针地实施以将夹脚从夹紧位置移入释放位置,那么夹脚就逆时针地偏转。如果操纵元件逆时针地实施偏转运动,那么夹脚就顺时针地偏转。操纵元件如此地布置,使其刚好不会没入导体连接腔,这样就能防止操纵元件与所连接的导体的共同作用。而夹箍弹簧、电流条和操纵元件如此地布置,使得夹箍弹簧布置在电流条的一个区段与操纵元件之间,待连接的导体被抵向该区段夹紧。这样就能在连接电导体时为使用者大幅简化接线配置的操作,因为操纵元件远离导体连接腔,因此,导体的插入不会被操纵元件的操纵阻碍。操纵元件并非直接作用于夹箍弹簧,而是通过导引元件间接作用。
7.导引元件可以具有滑动面,可以在导引元件实施偏转运动时沿该滑动面导引操纵元件。在滑动面上,操纵元件可以至少在操纵元件实施偏转运动以将夹脚从夹紧位置移入释放位置时抵靠在导引元件上。在偏转运动期间,操纵元件可以在滑动面上沿导引元件滑动,从而将按压力施加至导引元件,以使得导引元件移动。
8.导引元件可以具有两个纵向侧壁和与这两个纵向侧壁成直角的两个端壁,其中滑动面可以布置在导引元件的这两个端壁中的一个上。通过这两个侧壁和这两个与其成直角的端壁,导引元件可以具有矩形的技术方案。导引元件可以形成框架,其特别是可以包围或环扣电流条的一个区段和夹箍弹簧,导体可以被抵向该区段夹紧。滑动面优选如此地定向,使得滑动面横向于这两个纵向侧壁延伸。滑动面可以形成端壁的延长部,滑动面布置在该延长部上。滑动面可以形成斜面,其可以以30
°
至50
°
的倾角朝布置有滑动面的端壁延伸。
9.操纵元件可以具有旋转轴,该旋转轴可以在操纵元件实施偏转运动时沿导引元件的滑动面运动。操纵元件的偏转运动可以绕该旋转轴实施,使得操纵元件的旋转点处于该旋转轴中。这样就能直接在操纵元件的旋转点处实施从操纵元件至导引元件的力传递,以移动这个导引元件。通过这种技术方案实现特别紧凑的小体积技术方案。旋转轴可以以轴体形式构建。
10.操纵元件可以具有两个相互平行的臂部,其中旋转轴在这两个臂部之间延伸。旋转轴优选横向于这两个臂部的纵向延伸度定向。旋转轴优选以第一末端紧固在这两个臂部中的第一臂部上,且旋转轴以第二末端紧固在这两个臂部中的第二臂部上。
11.这两个臂部可以分别在一个末端区段上具有一个导引面,这些导引面可以在操纵元件实施偏转运动时分别沿导引元件的两个纵向侧壁的一个边缘面滑动。操纵元件可以通过臂部的导引面支撑在导引元件上,从而在操纵元件实施偏转运动时防止操纵元件相对导引元件倾斜。导引面可以经过倒圆。
12.操纵元件可以具有用于对操纵元件进行手动操纵的握持区段,这样就不需要额外的工具,例如螺丝起子来对操纵元件进行操纵。握持区段可以构建在操纵元件的臂部的与导引面相对的末端区段上。
13.导引元件的滑动面可以从两个端壁中的一个的边缘面出发朝操纵元件方向延伸。因此,滑动面可以形成这两个端壁中的一个朝操纵元件方向的延长部。
14.导引元件优选可以如此地移动,使得导引元件的位移运动可以横向于待连接导体进入导体连接腔的插入方向实施。这样就能实现特别紧凑的构建方案,借此,接线配置的结构空间有所减小。
15.为了在导引元件与夹箍弹簧的夹脚之间形成作用性连接,导引元件可以具有至少一个弹簧抵靠边,夹脚可以抵靠在该弹簧抵靠边上。弹簧抵靠边可以如此地构建,使得在夹脚的释放位置以及夹紧位置上,夹脚的至少一部分均可以抵靠在弹簧抵靠边上。弹簧抵靠边例如可以构建在导引元件的肩部上。
16.为了能够均匀地导引导引元件和夹箍弹簧的夹脚,在导引元件上构建有两个这样的弹簧抵靠边,使得夹脚在导引元件上的两个这样的弹簧抵靠边上受导引。这两个弹簧抵靠边优选相互平行地在导引元件上延伸。
17.在这种技术方案中,夹脚具有布置在具有夹边的主区段侧面的两个滑动区段,导引元件具有两个相互间隔布置的弹簧抵靠边,其中第一滑动区段可以抵靠在第一弹簧抵靠边上,第二滑动区段可以抵靠在第二弹簧抵靠边上。这两个滑动区段的长度优选小于夹脚的主区段。主区段和这两个滑动区段优选相互平行地延伸。这两个滑动区段优选呈弧形,从而分别形成一个滑橇,其可以分别沿一个弹簧抵靠边滑动。而主区段优选呈直线形。
18.导引元件的这两个纵向侧壁可以在导体的插入方向上具有某个长度,使得这两个纵向侧壁可以在第一侧和与第一侧相对的第二侧上形成导体连接腔的边界。因此,在待连接的导体插入导体连接腔的情况下,导引元件也可以形成这个待连接导体的导引件。这两个纵向侧壁可以防止导体误插。由此,导体连接腔可以在其两个侧面由导引元件形成边界,且在其另两个侧面由电流条和夹箍弹簧的夹脚形成边界。在这两个纵向侧壁上可以分别构建有两个弹簧抵靠边中的一个。
19.为了实现对夹箍弹簧的稳定支承,夹箍弹簧可以通过其保持脚支撑在电流条上。为此,夹箍弹簧例如可以以保持脚的一个区段平面状地抵靠在电流条的一部分上。此外,保持脚还可以具有开口,电流条的一部分可以穿过该开口,使得保持脚可以挂在电流条上。电流条的支撑有夹箍弹簧的保持脚的部分优选与电流条的可供导体抵向夹紧的区段相对布置。电流条的这个部分可以形成电流条的末端区段。
20.接线配置还可以具有触发元件,其可以在夹箍弹簧的释放位置上与导引元件卡合在一起。当待连接的导体插入导体连接腔时,触发元件可以如此地被这个导体操纵,使得触发元件与导引元件脱离卡合,且导引元件可以通过夹脚的弹力移动,从而使得夹脚移入夹紧位置以将导体抵向电流条夹紧。通过设置触发元件,特别是可以在未对操纵元件进行操纵的情况下连接柔性导体并且将其抵向电流条夹紧。为了将导引元件保持在释放位置,导引元件可以在夹箍弹簧的夹脚的释放位置上与触发元件卡合在一起。如果触发元件与导引元件卡合在一起,那么导引元件就无法实施位移运动,或者位移运动就会停止。通过触发元件与导引元件以及导引元件与夹箍弹簧的夹脚在夹脚的释放位置上的作用性连接或耦合,就能在无操纵元件辅助的情况下将夹脚保持在这个释放位置,由此,特别是可以将柔性导体插入由此在电流条与夹箍弹簧之间空出的导体连接腔。触发元件可以具有指向导体连接腔方向的按压面,该按压面可以与导体插入接线配置的插入区域对齐布置,或者与导体连接腔对其布置,使得导体在插入接线配置时撞击在触发元件的按压面上,从而由导体将按压力施加至触发元件。通过借助于导体对按压面进而对触发元件施加按压力,例如能够使
得触发元件进入沿导体的插入方向的偏转运动或倾斜运动,从而使得触发元件沿导体的插入方向背离导引元件偏转或倾斜。通过触发元件的偏转运动,触发元件可以与导引元件脱离卡合,使得导引元件可以重新自由移动,由此,导引元件可以在无人力辅助的情况下仅通过夹脚的弹力移动,从而使得夹脚可以从释放位置移入夹紧位置。通过这个特殊的机制,仅凭导体的插入运动便能特别简单地实现对柔性导体的连接,而无需使用者对其他元件、诸如操纵元件进行操纵来释放夹箍弹簧并使其从释放位置移入夹紧位置。借此简化接线配置的操作,并且在连接导体的过程中节省时间。触发元件优选在电流条的可供夹紧导体的区段与夹箍弹簧之间的区域范围内延伸,使得触发元件能够在一侧形成导体连接腔的边界。
21.为了借助于插入导体连接腔的导体使得触发元件与导引元件分离,进而与导引元件脱离卡合,触发元件以可相对导引元件倾斜的方式支承。因此,触发元件可以呈翘板状。如果待连接的导体压向触发元件,那么触发元件可以沿导体的插入方向倾斜,以便与导引元件脱离卡合从而释放导引元件,使得这个导引元件可以重新自由移动。
22.为了在夹箍弹簧的夹脚的释放位置上形成触发元件与导引元件的卡合,触发元件可以具有至少一个底部切口,该底部切口可以在夹箍弹簧的夹脚的释放位置上与导引元件的至少一个卡扣凸缘扣合。这样就能在夹箍弹簧的夹脚处于释放位置的情况下,在导引元件与触发元件之间形成卡扣连接。触发元件优选地具有两个底部切口,导引元件优选地具有两个卡扣凸缘,从而在导引元件与触发元件之间形成双重的作用性卡扣。如果设有两个底部切口,那么这些底部切口优选构建在触发元件的两个相互平行的侧面上。
23.触发元件可以与夹箍弹簧的保持脚连接。触发元件优选如此地与保持脚连接,使得触发元件可以相对保持脚偏转。在此情形下,偏转轴优选构建在触发元件与夹箍弹簧的保持脚的接合区域内。保持脚与触发元件之间的连接优选可以如此地构建,使得保持脚与触发元件一体成型。但触发元件也可以为独立于夹箍弹簧、电流条和导引元件构建的元件或部件。
24.本发明的目的还通过一种接线端子、特别是接线板来达成,所述接线端子具有至少一个如上所述地构建和改进的接线配置。所述接线端子例如可以布置在印制电路板上。若所述接线端子构建为接线板,则所述接线板可以布置在安装导轨上。
25.还可以设有接线端子配置,其可以具有多个接连排列布置的接线端子,所述连接端子可以分别具有至少一个如上所述地构建和改进的接线配置。
26.此外,还可以设有插式连接器,所述插式连接器可以具有一或多个如上所述地构建和改进的接线配置。
27.本发明的目的还可以通过一种电子设备来达成,所述电子设备可以具有至少一个如上所述地构建和改进的接线配置,和/或至少一个如上所述地构建和改进的接线端子。
附图说明
28.下面参照附图结合优选实施方式对本发明进行详细说明。
29.其中
30.图1为本发明的接线端子以及接线配置的示意图,包含夹箍弹簧的处于夹紧位置的夹脚,
31.图2为当对操纵元件进行操纵以使得夹箍弹簧的夹脚从夹紧位置移入释放位置
时,图1所示接线端子的示意图,
32.图3为图1所示接线端子的示意图,包含夹箍弹簧的处于释放位置的夹脚,
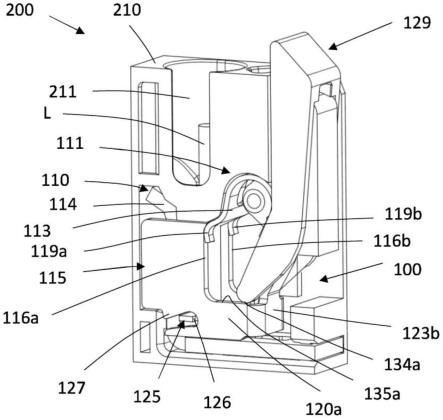
33.图4为如图1所示接线端子的示意性剖视图,
34.图5为如图2所示接线端子的示意性剖视图,以及
35.图6为如图3所示接线端子的示意性剖视图。
具体实施方式
36.图1至6示出具有壳体210的接线端子200,该壳体可以由绝缘材料形成,其中在壳体210中布置或容置有用于连接例如图1和图4所示导体l的接线配置100。
37.特别是如图4至6的剖视图所示,接线配置100具有电流条110和构建为支腿弹簧的夹箍弹簧111。夹箍弹簧111具有保持脚112和夹脚113。保持脚112保持在固定位置,而夹脚113可以相对保持脚112偏转。通过夹脚113的偏转运动,这个夹脚可以移入夹紧位置(如图1和图4所示)以及移入释放位置(特别是如图3和图6所示)。在夹紧位置上,夹脚113压向电流条110的一个区段114或者压向插入接线配置100的导体,以将这个导体夹紧并连接至电流条110的区段114。在释放位置上,夹脚113与电流条110的区段114隔开,使得导体l可以插入由此形成在电流条110的区段114与夹脚113之间的自由空间。
38.夹箍弹簧111通过其保持脚112支撑在电流条110上。
39.此外,接线配置100具有导引元件115。导引元件115特别是以可相对于电流条110移动的方式支承,使得导引元件115可以实施水平的位移运动。
40.夹箍弹簧111的夹脚113可以借助于导引元件115从夹紧位置移入释放位置,并且保持在释放位置。为此,导引元件115与夹箍弹簧111的夹脚113处于作用性连接。
41.在此处所示技术方案中,导引元件115具有两个相互平行的弹簧抵靠边116a、116b,夹脚113抵靠在这些弹簧抵靠边上。
42.夹脚113具有主区段117,在其自由端上构建有夹边118。主区段117侧面构建有两个滑动区段119a、119b,使得主区段117布置在这两个滑动区段119a、119b之间。这两个滑动区段119a、119b抵靠在导引元件115的这两个弹簧抵靠边116a、116b上,其中滑动区段119a抵靠在弹簧抵靠边116a上,滑动区段119b抵靠在弹簧抵靠边116b上。滑动区段119a、119b在夹箍弹簧111的夹脚113的释放位置和夹紧位置上均抵靠在弹簧抵靠边116a、116b上。
43.滑动区段119a、119b的长度小于主区段117。滑动区段119a、119b呈弧形,从而形成橇形,借助于这个滑板形,当夹脚113移入释放位置和夹紧位置时,滑动区段119a、119b可以沿弹簧抵靠边116a、116b滑动。
44.这两个弹簧抵靠边116a、116b构建在导引元件115的相对的纵向侧壁120a、120b上。这两个纵向侧壁120a、120b相互平行。这两个纵向侧壁120a、120b分别具有一个上缘121a、121b和一个相对的下缘122a、122b。弹簧抵靠边116a、116b分别垂直于上缘121a、121b延伸。从水平延伸的上缘121a、121b出发,弹簧抵靠边116a、116b朝导引元件115的水平延伸的下缘122a、122方向向下延伸。下缘122a、122可以在导引元件115平行于电流条110的区段131移动的情况下滑动,该区段平行与电流条110的夹有导体l的区段114地对准或定向。
45.电流条110和夹箍弹簧111布置在导引元件115的两个纵向侧壁120a、120b之间。电流条110和夹箍弹簧111被导引元件115包围。因此,导引元件115形成将电流条110和夹箍弹
簧111容置在内腔中的框架。
46.导引元件115还具有两个相互平行的端壁123a、123b。端壁123a、123b横向于导引元件115的两个纵向侧壁120a、120b布置。因此,导引元件115具有大体呈矩形的横截面。
47.在电流条110的区段114与夹脚113之间构建有可供待连接导体l插入的导体连接腔124。导体连接腔124的侧面被导引元件115的两个纵向侧壁120a、120b覆盖或由其形成边界,使得导引元件115同样形成待连接导体l的导引件。
48.导体连接腔124与构建在壳体210中的导体入口211齐平,可以经由该导体入口将待连接导体l沿插入方向e插入接线端子200的壳体210。
49.接线配置100还具有触发元件125。触发元件125与导体入口211和导体连接腔124齐平。触发元件125在下方形成导体连接腔124的边界。
50.特别是从图3可以看出,在夹箍弹簧111的夹脚113的释放位置上,触发元件125与导引元件115卡合在一起,使得引元件115保持在其位置上,由此,夹脚113同样通过弹簧抵靠边116a、116b和滑动区段119a、119b保持在其位置上,从而防止夹脚113非期望地从释放位置回转至夹紧位置。
51.触发元件125具有两个布置在侧面的底部切口126,其在夹箍弹簧111的夹脚113的释放位置上分别与导引元件115的一个卡扣凸缘127卡合在一起,以在导引元件115与触发元件125之间形成卡扣。第一卡扣凸缘127构建在纵向侧壁120a上,第二卡扣凸缘127构建在纵向侧壁120b上。触发元件125因这两个底部切口126而呈t形。
52.如图1所示,在夹紧位置上,触发元件125与导引元件115脱离卡合,使得导引元件115可以自由移动。
53.触发元件125以可相对导引元件115倾斜的方式支承。
54.在将待连接导体l沿插入方向e经由导体入口211插入导体连接腔124时,导体l撞击在触发元件125上,从而使得触发元件125相对导引元件115倾斜,从而脱离与导引元件115的卡合,使得导引元件115可以重新自由移动,由此,导引元件115可以在无人力辅助的情况下仅通过夹脚113的弹力移动,从而使得夹脚113可以从释放位置移入夹紧位置。
55.触发元件125具有指向导体连接腔124的按压面128,该按压面与导体入口211齐平或与导体连接腔124齐平地布置,使得导体l在插入接线配置100时撞击在触发元件125的按压面128上,从而由导体l将按压力施加至触发元件125。通过借助于导体对按压面128进而对触发元件125施加按压力,能够使得触发元件125进入沿导体l的插入方向e的偏转运动或倾斜运动,从而使得触发元件125沿导体l的插入方向e背离导引元件115偏转或倾斜。
56.在此处所示技术方案中,特别是如图5和图6所示,触发元件125接合至夹箍弹簧111的保持脚112。触发元件125以某种方式接合,使得触发元件125可以相对停留在固定位置的保持脚112偏转。偏转轴可以构建在触发元件125与保持脚112的接合区域内。
57.在导引元件与触发元件125脱离卡合的情况下,这个导引元件115沿某个方向实施位移运动v,该方向横向于待连接导体l插入导体连接腔124的插入方向e。
58.为了借助于导引元件115将夹脚113反向于其弹力从夹紧位置移回释放位置,接线配置100具有操纵元件129。操纵元件129以可沿箭头s偏转的方式支承。操纵元件129可以在接线端子200的壳体210的外侧上偏转。
59.操纵元件129以偏转杆的形式构建。操纵元件129的长度延伸超过接线端子200的
壳体210的高度的三分之二。
60.操纵元件129具有两个相互平行的臂部132a、132b。这两个臂部132a、132b在操纵元件129的长度范围内延伸。在这两个臂部132a、132b的长度之间布置有以轴体形式构建的旋转轴133。旋转轴133横向于这两个臂部132a、132b的纵向延伸度延伸。
61.导引元件115具有以斜面形式构建的滑动面130,可以沿该滑动面导引操纵元件129。在此处所示技术方案中,滑动面130成型在导引元件115的端壁123b上。滑动面130从端壁123b出发朝操纵元件129方向延伸。滑动面130因构建为斜面而倾斜地布置,使得滑动面130在此以130
°
至160
°
的角度相对导引元件115的端壁123b延伸。
62.替代地,滑动面130也可以与端壁123b有所间隔地布置在两个纵向侧壁120a、120b之间,使得滑动面130直接接合至纵向侧壁120a、120b。
63.旋转轴133形成旋转点,操纵元件129可以绕该旋转点沿偏转方向s偏转。特别是如图5所示,在对操纵元件129进行操纵时,旋转轴133与导引元件115的滑动面130处于作用性连接,具体方式是,在操纵元件129实施偏转运动以将夹脚113从夹紧位置移入释放位置时,旋转轴133可以沿导引元件115的滑动面130滑动。由于旋转轴133沿滑动面130滑动,操纵元件129将按压力施加至滑动面130进而施加至导引元件115,由此,导引元件115通过位移运动v而水平地移动。
64.借助于操纵元件129,导引元件115可以如此地移动,使得夹箍弹簧111的抵靠在导引元件115上的夹脚113可以从夹紧位置移入释放位置。在沿偏转方向s对操纵元件129进行操纵时,操纵元件129可以如此地向下偏转,从而通过旋转轴133将按压力施加至导引元件115,以使得导引元件115反向于夹箍弹簧115的夹脚113的弹力移动,从而在到达夹脚113的释放位置后,导引元件115能够与触发元件125卡合在一起。通过导引元件115的这个位移运动v,夹脚113从夹紧位置偏转至释放位置。
65.如图3和图6所示,如果夹脚113处于释放位置且导引元件115与触发元件125扣合,那么操纵元件129就能重新偏转回其起始位置。在无操纵元件129辅助的情况下,夹脚113借助于导引元件115停留在其释放位置。在这个释放位置上,操纵元件129的旋转轴133远离滑动面130。如图1和图4所示,只有在借助于导体l操纵触发元件125,进而触发元件125与导引元件115间的卡扣分离,从而使得导引元件115通过夹脚113用以进入夹紧位置的力而移动的情况下,操纵元件129的旋转轴133才会重新抵靠在导引元件115的滑动面130上。
66.这两个臂部132a、132b分别在其末端区段中的一个上具有一个导引面134a、134b,这些导引面可以在操纵元件129实施偏转运动时分别沿导引元件115的两个纵向侧壁120a、120的一个边缘面135a、135b滑动。边缘面135a、135b分别与弹簧抵靠边116a、116b成直角。边缘面135a、135b平行于上缘121a、121b地延伸,具体方式是,边缘面135a、135b与相应上缘121a、121b在高度上错开布置。操纵元件129可以通过导引面134a、134b在导引元件115,特别是导引元件115的边缘面135a、135b上滚动。
67.在臂部132a、132b的与导引面134a、134b相对构建的末端区段上构建有握持区段136,可以通过该握持区段对操纵元件129进行手动操纵。
68.操纵元件129在这两个臂部132a、132b之间具有自由空间137,在图1、图3、图4和图6所示技术方案中,接线配置200的壳体210的一部分138可以穿过该自由空间。
69.操纵元件129与夹箍弹簧111的保持脚112相邻地布置。因此,操纵元件129布置在
夹箍弹簧111之后。夹箍弹簧111布置在电流条110的区段114与操纵元件129之间。
70.附图标记说明
71.100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接线配置
72.110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电流条
73.111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹箍弹簧
74.112
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
保持脚
75.113
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹脚
76.114
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电流条的区段
77.115
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导引元件
78.116a、116b
ꢀꢀꢀꢀꢀꢀꢀꢀ
弹簧抵靠边
79.117
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
主区段
80.118
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹边
81.119a、119b
ꢀꢀꢀꢀꢀꢀꢀꢀ
滑动区段
82.120a、120a
ꢀꢀꢀꢀꢀꢀꢀꢀ
纵向侧壁
83.121a、121b
ꢀꢀꢀꢀꢀꢀꢀꢀ
上缘
84.122a、122b
ꢀꢀꢀꢀꢀꢀꢀꢀ
下缘
85.123a、123b
ꢀꢀꢀꢀꢀꢀꢀꢀ
端壁
86.124
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导体连接腔
87.125
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
触发元件
88.126
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
底部切口
89.127
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
卡扣凸缘
90.128
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
按压面
91.129
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
操纵元件
92.130
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑动面
93.131
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电流条的区段
94.132a、132b
ꢀꢀꢀꢀꢀꢀꢀꢀ
臂部
95.133
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转轴
96.134a、134b
ꢀꢀꢀꢀꢀꢀꢀꢀ
导引面
97.135a、135b
ꢀꢀꢀꢀꢀꢀꢀꢀ
边缘面
98.136
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
握持区段
99.137
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
自由空间
100.138
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壳体的部分
101.200
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
接线端子
102.210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
壳体
103.211
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导体入口
[0104]vꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
位移运动
[0105]eꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
插入方向
[0106]sꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏转方向
[0107]
l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
导体
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。