1.本发明涉及一种具有或者不具有永磁铁的鼠笼式转子,一种具有这种类型的鼠笼式转子的异步电机及其应用。
背景技术:
2.异步电机的鼠笼式转子具有叠片组,在叠片组上具有电导体,在叠片组的端侧处具有短路环。由于电磁原因,异步电机的这些鼠笼式转子的短路环由具有高导电性的材料/金属合金制成。考虑到它们的机械强度,这些材料限制了转子转速和由此产生的该短路环上的离心力。
3.通过材料(铝、铜、铜合金)预设的转速边界值根据轴高度约为5000转/分钟。换言之,转速边界值由轨迹速度和相关的离心应力确定。
4.短路环由具有较低规格的电阻的均质材料制成。
5.为了加固短路环,在一些设计方案中,在短路环外径的转动轴肩上设置有固定环。
6.由于定子的气隙直径或定子孔,尺寸、尤其是这些保持环的外径也出于装配原因而受到限制。
技术实现要素:
7.因此,本发明的目的是提供一种异步电机的鼠笼式转子,其也适用于相对较大的轴高度和超过8000转/分钟的高转速。在此,鼠笼式转子也应设计用于相应的高的轨迹速度。
8.所提出的目的通过异步电机的鼠笼式转子实现,该鼠笼式转子具有导磁体,尤其是叠片组,该叠片组具有基本上轴向延伸的凹槽,该凹槽带有导体,该导体借助于短路环导电地连接在导磁体的端侧处,其中,短路环具有外侧、内侧、前侧和后侧,其中,由高强度材料制成的支撑元件至少径向地位于短路环的内部、也就是内侧,该支撑元件与短路环至少部段式地材料配合地连接。
9.支撑元件主要用于吸收离心力而不突出到异步电机的气隙中。这通过以下方式实现,即具有短路环的支撑元件至少在短路环内侧的预定部段处材料配合地连接到短路环。
10.支撑元件由机械强度高的材料制成,由于其相对较差的导电性,因此不用于传导电流,而主要适合用于在异步电机运行期间吸收短路环的离心力。
11.材料配合的连接在此理解为焊接,例如电子束焊接或热等静压(hip)或钎焊。在此,短路环和支撑元件应通过原子力或分子力密不可分地结合在一起。
12.因此,由铜、相对高强度的铜合金或具有良好导电性的用于传导电流的其他材料制成的导电环通常位于径向更外侧,形成短路环。
13.支撑元件至少处于短路环的径向内侧处,其至少部段式地(从轴向和/或周向上看)与短路环的内侧材料配合地连接。
14.支撑元件在其基本形式中以几何的方式实施为环或孔盘,其中,其外侧与短路环
的内侧材料配合地连接。
15.就其基本形状而言,支撑元件也能够实施为三角形、正方形、五边形等。然后在相应的角点中提供材料配合的连接。
16.因此根据本发明,在一个特别的实施方式中,在导磁体的每个端侧处有两个由不同材料制成的同心环,它们尤其彼此材料配合地连接。在导电的短路环的径向内部是由钢(尤其是非磁性的钢)或由具有高机械强度的其他材料制成的环,用于减轻外环处、即短路环处的周向应力。
17.可替换地,也能够在导电的短路环的径向内部提供由高机械强度的磁性材料制成的环,用于减轻外环处、即短路环处的周向应力。
18.决定性的是外环,即短路环,主要传导电流,并仅吸收或能够吸收较小程度的离心力,而提供支撑元件,即内环,仅用于稳定和离心力吸收,尤其在高转速范围内在高的轨迹速度的情况下。
19.也可称为支撑环的内环通常具有与短路环的轴向厚度相对应、尤其在内侧处相对应的轴向厚度。但是,支撑环在其轴向范围上也能够实施为更大或更小。这尤其取决于在异步电机运行期间要吸收的离心应力。支撑环也能够实施成圆盘环的形状,其中振动波腹或振动波谷位于径向曲线上。
20.为了进一步获得支撑效果的提高,支撑元件在短路环的前侧处和/或短路环的后侧处具有附加的盘形元件和/或径向延伸部(支柱和/或爪形星形件),其同样至少部段式地与短路环材料配合地连接。因此,支撑元件能够一件式地或也能够模块化地构造,其中,各个模块也同样材料配合地彼此连接。
21.这些盘形元件和/或径向延伸部能够延伸至异步电机的气隙,以便获得短路环的附加的离心力释放。
22.这些径向延伸部,优选地在短路环的后侧处,也能够实施为爪形星形件或支柱,以便因此也在从叠片组突出的导体之间延伸。
23.爪形星形件的爪或支柱尤其也能够作为径向风扇,从而改善鼠笼转子的冷却。在此,爪或支柱的径向延伸,以及对此爪或支柱的倾斜走向也是可行的,以便改善径向的通风效果。
24.具有支撑元件和在一侧或两侧布置的爪形星形件(即布置在短路环的前侧和/或后侧上)的实施例也是可行的。爪形星形件的爪能够径向短地或径向长地实施。短的实施方案的优点能够是更简单的生产。短路环一侧上的短爪和长爪的组合也是可行的。
25.具有支撑元件和在一侧或两侧布置的支柱(即布置在短路环的前侧和/或后侧)的实施例也是可行的。爪形星形件的支柱能够径向短地或径向长地实施。短路环一侧上的短支柱和长支柱的组合也是可行的。
26.为了避免鼠笼转子可能的不平衡,混合环,即短路环和支撑元件的组合,也能够位于轴的中心。在此有利的是,在支撑元件的径向内部处存在轴向的孔或通道,以便实现气流在支撑元件与叠片组之间的区域中流动。
27.在此,支撑元件能够实施为辐条轮的形式,其中围绕轴闭合的内环和经由辐条与内环连接的外环支撑短路环。
28.除了由导体和短路环制成的笼子外,鼠笼式转子还能够在导磁体中或导磁体处具
有永磁体,尤其具有叠片组,以便也能够用于线路启动马达。
29.通过根据本发明的转子转速的可能的提高,能够实现异步电机的马达或发电机性能的提高。
30.根据本发明,现在存在鼠笼式转子的高集成度,其具有用于机械稳定、冷却和以低损耗传导电流的机构。
31.尤其也能够保留转子的叠层结构。由此,与导磁体的实心的实施方案相比,产生相对较低的转子损耗并且实现了更好的效率。
32.这些措施通过提高最大转速来提高异步电机的性能。这是在保留其他有源电路组件(例如定子)或无源组件(例如异步电机的轴承)的同时实现的。
33.本发明和本发明的其他有利的设计方案将参照原理性示出的实施例进行更详细的解释;图中示出:
附图说明
34.图1示出了具有支撑环的鼠笼式转子的部分纵向截面,
35.图2示出了根据图1的具有支撑环的鼠笼转子的透视图,
36.图3示出了具有支撑环和圆盘的鼠笼式转子的部分纵向截面,
37.图4示出了根据图3的具有支撑环和圆盘的鼠笼式转子的透视图,
38.图5示出了具有支柱的鼠笼式转子的部分纵向截面,
39.图6示出了根据图5的鼠笼式转子的部分横截面,
40.图7示出了具有爪形星形件的鼠笼式转子的部分纵向截面,
41.图8示出了根据图7的鼠笼式转子的部分横截面,
42.图9示出了还具有爪形星形件或支柱的鼠笼式转子的俯视截面图,
43.图10示出了还具有圆盘和支柱等的鼠笼式转子的部分纵向截面,
44.图11示出了具有支柱等的鼠笼式转子的部分纵向截面,
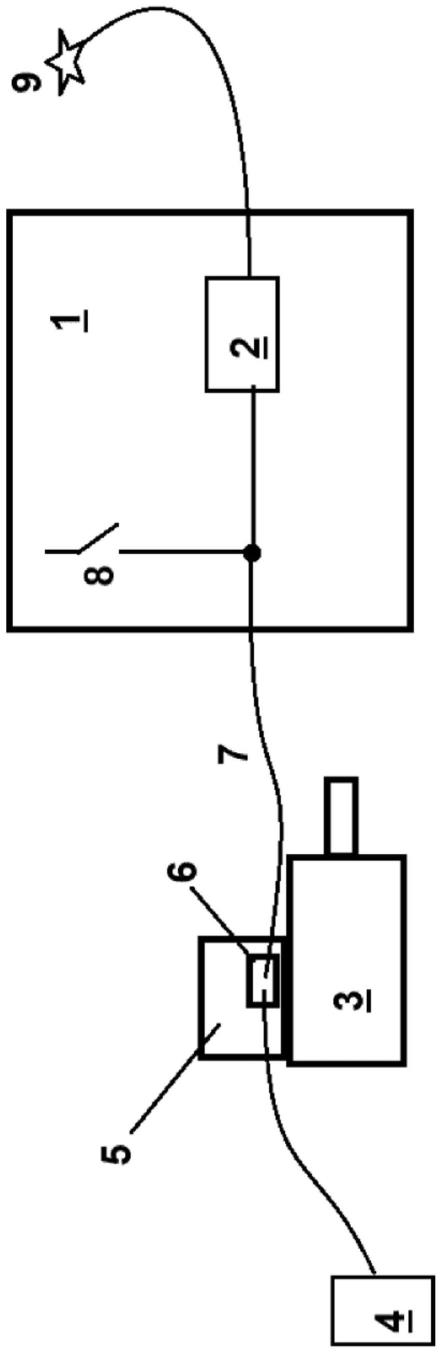
45.图12示出了异步电机的纵向截面。
具体实施方式
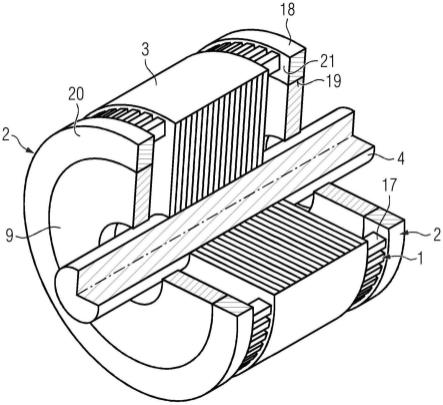
46.图1示出了异步电机7的鼠笼式转子6的部分纵向截面,其中,在实施为实心的或叠片组3的导磁体中,电导体1、尤其是导体棒布置在基本上轴向延伸的凹槽8中,该电导体在叠片组3的端侧10处分别与短路环2电接触。叠片组3抗扭地与轴4连接并且可围绕轴线5旋转地支承。机械强度高的支撑环9以非磁性或磁性的方式径向位于短路环2的内部,该支撑环9在其外周面上至少部分地以材料配合的方式与短路环2的内侧19连接。
47.原则上,在以下实施方式中,这种材料配合的连接也能够通过hip方法、焊接方法、冷喷涂方法或其他技术产生。
48.图2示出了该实施方式的透视图,短路环2如何与叠片组3轴向间隔并进而确保对特别是从叠片组3突出的自由的导体棒部段和短路环2的冷却。在此,导体棒的从叠片组3的端侧10突出并且不位于短路环2中的轴向部段被称为自由的导体棒部段17。
49.在该实施方案中,支撑环9与轴4具有间距30,使得自由的导体棒部段还获得冷却气流。
50.在另一个实施方案中,图3示出了径向在短路环2的内部的支撑环9,并且还在短路环2的前侧20处示出了轴肩(尤其是圆盘12)在未详细地示出的气隙16的方向上的径向延伸部,该轴肩在短路环2的前侧20处稳定和支撑短路环以抵抗离心应力。该圆盘12同样至少部分地以材料配合的方式与短路环2和/或支撑环9连接。
51.圆盘12和支撑环9两者以材料配合的方式彼此连接或制成一件式的。圆盘12的外半径不大于或仅略大于短路环2的外半径。在任何情况下,它都不应突出到气隙16中。
52.根据图4,该实施方案以透视图更详细地示出。
53.与根据图3和图4的这些部分的阴影相反,支撑环9和圆盘12也能够由一件式的元件或材料制成。因此,然后应在短路环2的内侧19和前侧20与该一件式的元件之间提供至少部段式的材料配合的连接。支撑环9因此将具有径向延伸的轴肩或径向延伸的肩部。
54.图5示出了另一个实施方案中的两个环,一方面是短路环2和由高强度材料制成的支撑环9,支撑环在径向上进一步向内放置。此外,在短路环2的后侧21处,即短路环2与叠片组3的端侧10之间的间隔内有支柱13,其中,各个支柱13分别在气隙16的方向上延伸并进而尤其在高转速范围内附加地支持短路环2以抵抗离心应力。这些支柱13同样至少部段式地与短路环2和/或支撑环9材料配合地连接。
55.图6以部分横截面示出了该实施方案,其中,各个支柱13在导体棒1之间延伸并且最多达到气隙16。
56.与根据图5和图6的这些部分的阴影相反,支撑环9和支柱13也能够由一件式的元件或材料制成。因此,然后应在短路环2的内侧19和后侧21与该一体式的元件之间提供至少部段式的材料配合的连接。支撑环9因此将具有径向延伸的支柱13。
57.在另一个实施方案中,图7示出了三个环,一方面是短路环2,由高强度材料制成的在径向上进一步向内放置的支撑环9,以及形成爪形星形件31的环。爪形星形件31在此具有带有径向延伸的爪的环。此外,在短路环2的后侧21处,即在短路环2与叠片组3的端侧10之间的间隔中有爪形星形件31的爪。这些单独的爪在气隙16的方向上延伸,并进而也尤其在高转速范围内附加地支持短路环2以抵抗离心应力。该爪形星形件31同样至少部段式地与短路环2和/或支撑环9材料配合地连接。
58.图8以部分横截面示出了该实施方案,其中,各个爪在导体棒1之间延伸并且最多达到气隙16。
59.支撑环9以及还有爪形星形件31与轴4具有间距30,使得自由的导体棒部段17还获得冷却气流。
60.图9以局部视图示出了鼠笼式转子6的截面,其中,短路环2由爪形星形件31或支柱13支撑,其中,爪或支柱13分别在导体棒1之间延伸。在该实施方案中,爪或支柱13不接触导体棒并且因此能够借助于冷却气流有助于尤其导体部段17的冷却。
61.爪形星形件31的爪或独立的支柱13能够在可预设的范围内占据两个相邻的导体棒、短路环2的后侧和叠片组3的端侧10之间在轴向和/或周向方向上的间隔。
62.图10示出了另一个实施方案,其中短路环2由高强度支撑环9支撑在内侧19上并且轴向在两侧上由爪形星形件31(后侧21)和由圆盘12(前侧20)支撑。然而,为了在叠片组3的端侧10与短路环2的后侧21之间的间隔中获得足够的冷却,在该实施方案中,在轴4的区域中在支撑环9中提供通道14,以使冷却空气能够轴向通过。在这种情况下,支撑环9例如类似
辐条轮地构造。
63.为了避免鼠笼式转子6中可能出现的不平衡,混合环、即短路环2和支撑元件9、31、13的组合也能够位于轴4的中心。因此,然后在混合环中提供通道14,以便在叠片组3的端侧10与短路环2的后侧21之间的间隔中获得足够的冷却。
64.通道14的布置能够有利地与鼠笼式转子6的平衡相关联。
65.除了支撑环9,短路环2还能够在前侧20处和后侧21处设有两个爪形星形件31。
66.根据图11,支撑环9设有通道14。同样也能够在短路环2的前侧20和后侧21上附加地设有径向较短的支柱13。
67.支撑环9还能够在短路环2的前侧20和后侧21上具有两个爪形星形件31,其具有径向较短的爪。因此,支撑环9在轴向上比短路环2厚。
68.支撑环9、爪形星形件31和支柱13被简单地实施为环形盘,从横截面看为具有矩形爪的环形盘和从横截面看为矩形支柱,可能具有不同的径向长度,例如如图11所示。
69.然而,为了获得上述实施的元件在强度、惯性或流动技术方面优化的形式,这些元件例如是圆形的、拱形的、辐条状的或在它们的走向中实施有不同的横截面。
70.此外,支撑环9和/或爪形星形件31和/或支柱13既能够实施为一件式的并且与短路环2材料配合地连接,或者能够作为单个元件彼此连接并与短路环2材料配合地连接。
71.图12示出了原则上的异步电机7,其中所有这些实施例都能够毫无问题地使用,因为这些实施例仅涉及鼠笼式转子6并且不必改变诸如定子,壳体,轴承等的其他部件。这导致整个异步电机7的性能提高,从而在压缩机、风扇和驱动区域的应用中,由于更高的转速能够实现性能的显著提高。
72.原则上,本发明的想法也能够用于鼠笼式转子6,其短路环2、即短路环2的后侧21直接抵靠在叠片组3的端侧10处(图12)。在此,在内侧19处设支撑环9,并且必要时还在短路环2的前侧处设有圆盘12或爪形星形件31或支柱13。
73.圆盘12、爪形星形件31或支柱13也能够在短路环2的外侧18处具有轴向的重叠,这能够附加地吸收短路环2的离心力。
74.原则上,在所有实施方式中,鼠笼式转子6除了短路环2和导体1外,还能够包括永磁体,以便用作pm线路启动马达。在此,马达直接连接到网络,并借助于鼠笼异步运行,即经由短路环2和短路的导体1以同步的转速高速运行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。