线性差分定向麦克风阵列
背景技术:
1.语音增强技术是许多嘈杂环境下的远场拾音设备不可或缺的组成部分。枪型麦克风(通常是一个超心形封装体,带有长、中空、开槽的干扰管)和麦克风阵列都因其高方向性而能够衰减环境噪声或干扰。枪型麦克风通常用于许多需要低噪音的应用中,例如特定摄像机、会议专用或特定采访的情境中。虽然,该类型的枪型麦克风可以在嘈杂的环境中沿某个方向拾取声音,使拾取的声音更清晰、噪音更小,但它们具有固定的波束形成特性,并且不可调谐。此外,设计和生产该类型麦克风的成本相对较高。相比之下,采用适当信号处理算法的麦克风阵列可以提供更灵活的解决方案。
2.在所有麦克风阵列中,差分麦克风阵列(dma)近年来备受关注。作为dma的一种类型,线性差分麦克风阵列(ldma)已被广泛研究,但是,许多已发步的ldma设计似乎都采用了全向麦克风。虽然稳健的ldma设计可以通过使用比ldma的阶数更多的麦克风元件,以最小范数解决方案来改善白噪声增益(wng),但是wng可能仍然相对较低,尤其是在低频率下,其在实际实现中引起众所周知的白噪声放大问题。此外,常规ldma的方向性因子(df)通常会随着频率的增加而降低,并且在高频下波束模式也倾向于变形。
附图说明
3.详细描述参照附图。在附图中,参考编号最左边的数字标识参考编号首先出现的图。在不同的图中使用相同的参考编号表示相似或相同的项目或特征。
4.图1a示出了具有m个定向麦克风的均匀线性阵列(ula)的示例图。
5.图1b示出了具有m个定向麦克风的非均匀线性阵列(nula)的示例图。
6.图2示出了线性差分定向麦克风阵列(lddma)的示例。
7.图3a和图3b分别示出1khz处的二阶心形图案和三阶图案的波束模式。
8.图4a和图4b分别示出了在3khz处的二阶心形图案和三阶图案的波束模式。
9.图5a和图5b分别示出了在6khz处的二阶心形图案和三阶图案的波束模式。
10.图6a和图6b分别示出了针对不同类型的麦克风(p=1,p=0.5,p=0)的2阶lddma设计的白噪声增益(wng)和方向性指数(di)的比较。
11.图7a和7b分别示出了针对不同类型的麦克风(p=1,p=0.5,p=0)的3阶lddma设计的wng和di中的比较。
12.图8示出了用于构造lddma的示例过程。
具体实施方式
13.提供了一种线性差分定向麦克风阵列(lddma)的设计方法,该方法考虑了阵列元件的方向性。某些定向麦克风元件具有固有的独特性能,其可以优于全向麦克风元件。lddma可以实现为高性能的枪型拾音设备。
14.全向和定向麦克风元件在行业中普遍使用。全向麦克风从各个方向以同等增益拾取声音,而定向麦克风主要从某些特定方向拾取声音。在数学上,定向麦克风的波束模式可
以表示为u(p,θ,α)=p (1-p)cos(θ-α)其中θ是声音入射角,α是麦克风元件的转向方向,并且p定义了定向麦克风的特性,例如,当p=0.5时,它形成众所周知的心形波束模式,当p=0时,形成偶极子波束模式。定向麦克风可以是任何类型的定向麦克风,包括全向、心形、偶极子麦克风等。
15.有两种方法可以实现定向麦克风,一种是使用带有两个声音入口的单个麦克风盒的专用定向麦克风,另一种是带有适当数字信号处理的双全向元件系统。在信噪比(snr)方面,已知的专用定向麦克风方法比双全向元件系统方法产生更好的定向麦克风。专用定向麦克风的该种性能优势主要归因于信号处理,该信号处理产生了指向性,并通过前后声音入口进行了声学处理。可以利用专用定向麦克风的该种独特特性来实现比常规ldma更好的性能。专用定向麦克风可以采用驻极体电容麦克风(ecm)或微机电系统(mems)的形式。
16.图1a示出了具有m个定向麦克风104的均匀线性阵列(ula)102的示例图100。图1b示出了具有m个定向麦克风110的非均匀线性阵列(nula)108的示例图106。
17.对于图1中的ula 102,元件间间隔记为δ,并且所有定向麦克风104、1至m均指向右方,即α=0(为了简单起见,在下面的描述中将省略)。对于图1b中的nula 108,元件间间隔相对于第一定向麦克风110发生变化,并记为δ1…
δm。所有定向麦克风110,1至m也均指向右侧。如果平面波112以θ的入射角入射到阵列102上,则转向向量d由下式给出:d(ω,θ)=[p (1-p)cosθ][1 e-jωδcosθ/c
ꢀ…ꢀ
e-jω(m-1)δcosθ/c
]
t
,
ꢀꢀ
(1)其中上标t是转置算子,是虚数单位,ω=2πf是角频率,f是时间频率。为了进行比较,带有全向麦克风的常规ula的转向向量可以表示为:a(ω,θ)=[1 e-jωδcosθ/c
ꢀ…ꢀ
e-jω(m-1)δcosθ/c
]
t
,
ꢀꢀ
(2)通过将定向麦克风的波束模式的方程与具有全向麦克风的常规ula的方程(2)相结合,所述转向向量d(ω,θ)可以表示为:d(ω,θ)=u(p,θ)a(ω,θ)
ꢀꢀ
(3)
[0018]
波束成形问题可以被解释为一个空间滤波器,用于通过应用复权向量来估计来自所需的注视方向的信号,并抑制来自不所需的方向的信号:h(ω)=[h1(ω)h2(ω)
···hm
(ω)]
t
.
ꢀꢀ
(4)
[0019]
在给定的信号模型下,在所需的视方向θ=0时,波束形成器表现出无失真响应,即,dh(ω,0)h(ω)=1,其中上标h是共轭-转置算子。在其他方向上,波束形成器在响应上显示出一定的失真,即,dh(ω,θ)h(ω)《1。
[0020]
三种广泛使用的性能指标,即白噪声增益(wng)、波束图和方向性因子(df)的数学定义如下所示。wng显示了波束形成器抑制空间不相关噪声的能力,并且也是评估波束形成器对其某些缺陷(例如传感器噪声、位置误差等)的灵敏度的最方便方法。wng定义为:w[h(ω)]=1/[hh(ω)h(ω)]。波束图显示出了波束形成器对从入射角θ入射到阵列102上的平面波108的方向灵敏度,如图1a所示,并在数学上定义为b[h(ω),θ]=dh(ω,θ)h(ω)。频率不变的波束模式通常是宽带语音处理的首选。
[0021]
方向性因子(df)定义为在所需的转向方向上的阵列输出响应功率与在所有方向上的平均功率之间的比率,即df计算为:其中,|b(ω,φ,θ)|是球坐标系
中的波束模式;θ是方位角,而φ是仰角。指向性指数(di)定义为di[h(ω)]=10*log10(df[h(ω)])。
[0022]
欲为带有定向传声器的ula设计n阶差分波束形成问题,可以将该问题表述为如下所示的线性方程组:r(ω,θ)h(ω)=c,
ꢀꢀ
(5)其中,θ是大小为(n 1)
×
m的约束矩阵r(ω,θ),由下式给得出:其中,dh(ω,θn),n=1,2,
…
,n,是方程式(1)中定义的长度为m的转向向量,并且θ=[0 θ1ꢀ…ꢀ
θn]
t
,
ꢀꢀ
(7)c=[1 c1ꢀ…ꢀcn
]
t
,
ꢀꢀ
(8)是大小为(n 1)的向量,其中包含波束形成器的设计参数。θ(粗体字母)表示方程式(7)中定义的空位置约束向量,θ1…
θn通常定义所需的空方向,并且θ1…
θn是这些方向的相应响应,即,如果需要某种衰减,则空值或小值为0。
[0023]
将方程式(3)和方程式(6)进行结合,得出:r(ω,θ)=u(p,θ)a(ω,θ),
ꢀꢀ
(9)其中,根据如下所示的转向向量a(ω,θ)构造转向矩阵a(ω,θ):u(p,θ)称为麦克风响应矩阵,并表示为对角矩阵:u(p,θ)=diag(1,u(p,θ1),
…
,u(p,θn))
ꢀꢀ
(11)
[0024]
为了最大化阵列102的wng,并求解(5)的线性方程组,可以使用最小范数解来获得lddma波束形成器,如下所示:h(ω)=rh(ω,θ)r(ω,θ)rh(ω,θ)-1cꢀꢀ
(12)其中,具有最小范数解的lddma波束形成器可被识别为与ldma波束形成器相同的形式。
[0025]
差异反映在r(ω,θ)中,r(ω,θ)由全向麦克风的常规远场转向向量和所提出的定向麦克风响应矢量组成,如方程式(9)所示。结合方程式(9)和(12),可以将lddma波束形成器重新表述为:h(ω)=ah(ω,θ)uh(p,θ)[u(p,θ)a(ω,θ)ah(ω,θ)uh(p,θ)]-1
c.
ꢀꢀ
(13)
[0026]
该方程式巧妙地显示了常规ldma的解决方案与所提出的lddma之间的关系,该lddma通过引入另一个自由度u(p,θ)来扩展ldma。换句话说,ldma是方程式(11)中的所有麦
克风在p=1时、将麦克风响应矩阵u(p,θ)简化为单位矩阵时的lddma的一个特例,即,lddma可以用作设计ldma的更通用框架。
[0027]
图2示出了lddma 200的示例。在该示例中,lddma 200被示出为具有六个麦克风,202、204、206、208、210和212(m=6),它们以1cm(δ=1cm)的元件间间隔线性地布置。可以使用的麦克风的类型有全向(p=1)、心形(p=0.5)和偶极子(p=0)。平面波214的入射角为θ。
[0028]
为了评估不同类型的定向麦克风(即p)对lddma波束形成器的性能的影响,使用了三种常用的麦克风元件,即,全向(p=1)、心形(p=0.5)和偶极子(p=0),用于形成具有δ=1cm和m=6的阵列构型的ula。比较两种设计在1khz,3khz和6khz频率下的波束模式,即,示出了和c=[1 0 0]
t
的二阶心形线和θ=和c=[1 0 0 0]
t
的三阶图案。
[0029]
图3a和图3b分别示出了在1khz处的二阶心形线302和三阶图案304的波束模式,并且图4a和图4b分别示出了在3khz处的二阶心形线402和三阶图案404的波束模式。可以观察到,低频率(1khz和3khz)下的lddma波束形成器与所需的波束模式匹配良好。然而,如图5a和图5b所示,其分别示出了在6khz处的二阶心形线502和三阶图案504的波束模式,波束模式在较高频率(即6khz)下偏离所需的波束模式。带有心形麦克风(p=0.5)的lddma在2阶设计中获得最大的旁瓣衰减,而带有偶极子麦克风(p=0)的lddma在3阶设计中获得最大的旁瓣衰减。需要注意的是,p=1的lddma成为带有全向麦克风的常规ldma。
[0030]
图6a和图6b分别示出了针对带有不同类型的麦克风(p=1,p=0.5,p=0)的2阶lddma设计的wng 602和di 604中的比较。图7a和7b分别示出了针对带有不同类型的麦克风(p=1,p=0.5,p=0)的3阶lddma设计的wng 702和di704中的比较。
[0031]
如图6a所示,带有定向麦克风(p=0.5和p=0)的2阶lddma在低频率下表现出显著高于常规ldma(全向麦克风,p=1)的wng,在低于400hz的频率下约为20db。在图6b中,对于p=0.5和p=0)的定向麦克风,其2阶lddma具有相同的di,其高于约3khz的高频率下的常规ldma的di。
[0032]
如图7a所示,带有偶极子麦克风(p=0)的三阶lddma设计在低频率时获得最佳wng,而常规ldma(p=1)最差。如图7b所示,在高于约5.5khz的高频率下,具有两个定向麦克风(对于心形为p=0.5,对于偶极子为p=0)的lddma比具有全向麦克风(p=1)的lddma产生更好的di,而麦克风的类型不会造成太大的差异。在低于约5.5khz的低频率下,di小于约0.5db。
[0033]
因此,3阶设计的wng和di的性能与2阶设计的wng和di类似,也就是说,在给定相同的约束条件下,在构造ldma时,定向麦克风在wng和di性能方面比全向麦克风更适合。
[0034]
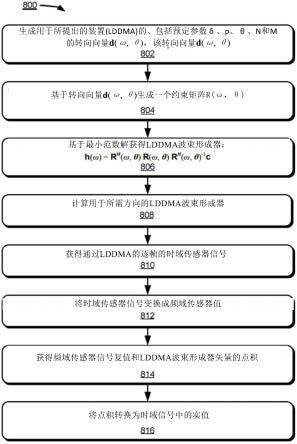
图8示出了用于构造lddma的示例过程800。lddma可以包括均匀的和非均匀的lddma。
[0035]
在框802,可以生成转向向量d(ω,θ),该转向向量d(ω,θ)用于所提出的装置(lddma)。也就是说,可以预先选择lddma的一些所需的参数,包括参数δ、p、θ、n和m,以生成转向向量d(ω,θ)。在框804,可以基于转向向量d(ω,θ)生成一个约束矩阵r(ω,θ)。例如方程式(9)所示,该约束矩阵r(ω,θ)可以分别基于转向矩阵和麦克风响应矩阵(例如方程式(10)和(1))来重新方程式化,并且是大小为(n 1)x m的矩阵,其中n是ula的差分波束形成
的阶数,m是麦克风的数量。麦克风响应矩阵可以基于带有如上所述的声音入射角θ、转向方向α和定向麦克风p的性质的定向麦克风的波束模式来导出。例如,p=1表示全向麦克风,p=0.5表示心形麦克风,p=0表示偶极子麦克风。尽管描述了全向、心形、以及偶极子麦克风,但是,所述定向麦克风可以是任何类型的定向麦克风。
[0036]
基于最小范数解,例如用于最大化白噪声增益(wng)的方程式(12),可以在框806处获得lddma波束形成器,例如方程式(13)的h(ω)。可以看出,波束形成器h(ω)是频率相关的复值权重。
[0037]
在框808处,可以计算在所需频率处用于所需方向的lddma波束形成器,并将其存储在存储器中,并且可以在框810处获得通过lddma的逐帧的时域传感器信号。在框812处,所有时域传感器信号可以被变换成频域传感器值。对于每一帧,信号在时域上的实值会变成频域上的复值。所使用的变换方法可以是短时傅立叶变换(stft)、滤波器组、小波变换等。在频域中,可以以矢量形式(lddma波束形成器矢量)加载lddma波束形成器复值权重,并且可以在框814处获得频域传感器信号复值和lddma波束形成器矢量的点积。然后,点积的结果是频域中的单个复数值,可以通过相应的逆变换函数将其转换为时域信号中的实值。
[0038]
如上所述,形成ula的不同类型的定向麦克风,例如全向(p=1)、心形(p=0.5)和偶极子(p=0)对lddma波束形成器的性能的影响,可以与不同的阵列配置一起使用,该阵列配置具有用于不同的命令模式的不同的元素间间隔δ和不同频率下的元素数量m,以评估波束模式,如图3a、3b、4a、4b、5a、5b、6a、6b、7a和7b所示。然后可以基于从波束模式和相关联的参数δ、p、θ、n和m中选择的波束模式来构造实际的ldmma。
[0039]
上述方法的部分或全部操作可以通过执行存储在计算机可读存储介质上的计算机可读指令来执行,如下定义。在说明书和权利要求中使用的术语“计算机可读指令”包括例程、应用程序、应用模块、程序模块、程序、组件、数据结构、算法等。计算机可读指令可以在各种系统配置上实现,包括单处理器或多处理器系统、小型计算机、大型计算机、个人计算机、手持式计算设备、基于微处理器的可编程消费电子产品、其组合等。
[0040]
计算机可读存储介质可以包括易失性存储器(诸如随机存取存储器(ram))和/或非易失性存储器(诸如只读存储器(rom)、闪存等)。计算机可读存储介质还可以包括附加的可移动存储和/或不可移动存储,包括但不限于闪存、磁存储、光存储和/或磁带存储,这些存储可以提供计算机可读指令、数据结构、程序模块等的非易失性存储。
[0041]
非暂时性计算机可读存储介质是计算机可读介质的示例。计算机可读介质包括至少两种类型的计算机可读介质,即计算机可读存储介质和通信介质。计算机可读存储介质包括在用于存储诸如计算机可读指令、数据结构、程序模块或其他数据的信息的任何过程或技术中实现的易失性和非易失性、可移动和不可移动介质。计算机可读存储介质包括但不限于相变存储器(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦可编程只读存储器(eeprom)、闪存或其他存储器技术、光盘只读存储器(cd-rom)、数字多功能磁盘(dvd)或其他光存储、磁带盒、磁带、磁盘存储或其他磁存储设备,或可用于存储信息以供计算设备访问的任何其他非传输介质。相反,通信介质可以在调制数据信号(例如载波)或其他传输机制中体现计算机可读指令、数据结构、程序模块或其他数据。如本文所定义的,计算机可读存储介质不包括通信介质。
[0042]
存储在一个或多个非暂时性计算机可读存储介质上的计算机可读指令,当由一个或多个处理器执行时,该计算机可读指令可以执行上述图8所示的操作。通常,计算机可读指令包括例程、程序、对象、组件、数据结构,以及诸如此类的执行特定功能或实现特定抽象数据类型的指令。描述操作的顺序不旨在被解释为限制,并且任何数量的描述操作可以以任何顺序和/或并行地组合以实现流程。示例性条款
[0043]
a.一种用于构造麦克风的线性阵列(la)的方法,包括:生成具有预选参数的la的转向向量;基于所述转向向量生成约束矩阵;基于麦克风响应矩阵和转向矩阵重新构造所述约束矩阵;通过应用所述约束矩阵的最小范数解,获得波束形成器;通过计算所需方向的波束形成器来验证la所需的特性;以及基于所述预选参数和所述波束形成器构造所述la。
[0044]
b.如段落a所述的方法,其中,所述la的麦克风是定向麦克风,并且所述la是线性差分定向麦克风阵列(lddma)。
[0045]
c.如段落b所述的方法,其中,所述lddma是均匀lddma或非均匀lddma中的一种。
[0046]
d.如段落a所述的方法,其中,所述约束矩阵是大小为(n 1)x m的矩阵,其中,n是所述la的差分波束成形阶数,m是麦克风数量。
[0047]
e.根据段落a所述的方法,其中,所述麦克风响应矩阵是基于定向麦克风的波束模式导出的,该定向麦克风具有声音入射角、转向方向和所述定向麦克风的特性。
[0048]
f.如段落e所述的方法,其中,所述定向麦克风的特性包括全向性、心形和偶极性。
[0049]
g.如段落a所述的方法。2.根据权利要求1所述的方法,其中,通过对所述约束矩阵应用最小范数解,以获得所述波束形成器,所述约束矩阵包括最大化白噪声增益(wng)。
[0050]
h.如段落a所述的方法,其中,所述计算所需方向的波束形成器,包括在所需频率下计算所述所需方向的波束形成器。
[0051]
i.如段落h所述的方法,其中,所述计算所需方向的波束形成器是基于通过所述la接收到的时域逐帧传感器信号。
[0052]
j.如段落i所述的方法,还包括:将所有所述时域逐帧传感器信号转换为频域传感器值。
[0053]
k.如段落j所述的方法,还包括:计算频域传感器值和波束形成器矢量的点积,所述波束形成器矢量与波束形成器的复值权重相关联。
[0054]
l.如段落k所述的方法,其中,基于所述预选参数和所述波束形成器构造所述la包括基于所述点积构造所述la。
[0055]
m.1.一种线性阵列(la),包括:线性布置、并以所需的麦克风间距隔开的所需数量的麦克风,所需的麦克风数量和所需的麦克风间距通过以下方式验证:生成具有预选参数的la的转向向量;基于所述转向向量生成约束矩阵;基于麦克风响应矩阵和转向矩阵重新构造约束矩阵;通过应用所述约束矩阵的最小范数解,获得波束形成器;通过计算所需方向的波束形成器,来验证la所需的特性;以及基于所述预选参数和所述波束形成器构造所述la。
[0056]
n.如段落m所述的la,其中,la的麦克风是定向麦克风,并且la是线性差分定向麦克风阵列(lddma)。
[0057]
o.如段落n所述的la,其中,所述lddma是均匀lddma或非均匀lddma中的一种。
[0058]
p.如段落m所示的la,其中,所述约束矩阵是大小为(n 1)x m的矩阵,其中,n是所述la的差分波束成形阶数,m是麦克风数量。
[0059]
q.如段落m所述的la,其中,所述麦克风响应矩阵是基于定向麦克风的波束模式导出的,该定向麦克风具有声音入射角、转向方向和所述定向麦克风的特性。
[0060]
r.如段落q所述的la,其中,所述定向麦克风的特性包括全向性、心形和偶极性。
[0061]
s.如段落m所述的la,其中,通过对所述约束矩阵应用最小范数解,以获得所述波束形成器,所述约束矩阵包括最大化白噪声增益(wng)。
[0062]
t.如段落m所述的la,其中,所述计算所需方向的波束形成器,包括在所需频率下计算所述所需方向的波束形成器。
[0063]
u.如段落t所述的la,其中,所述计算所需方向的波束形成器是基于通过所述la接收到的时域逐帧传感器信号。
[0064]
v.如段落u所述的la,还包括:将所有时域逐帧传感器信号转换成频域传感器值。
[0065]
w.如段落v所述的la,还包括:计算频域传感器值和波束形成器矢量的点积,所述波束形成器矢量与波束形成器的复值权重相关联。
[0066]
x.如段落w所述的la,其中,基于所述预选参数和所述波束形成器构造所述la包括基于所述点积构造所述la。
[0067]
y.一种计算机可读存储介质,其存储可由一个或多个处理器执行的计算机可读指令,所述计算机可读指令在由所述一个或多个处理器执行时,使所述一个或多个处理器执行包括以下各项的操作:生成具有预选参数的la的转向向量;基于所述转向向量生成约束矩阵;基于麦克风响应矩阵和转向矩阵重新构造所述约束矩阵;通过应用所述约束矩阵的最小范数解获得波束形成器;通过计算所需方向的波束形成器,来验证la所需的特性;以及基于所述预选参数和所述波束形成器构造所述la。
[0068]
z.如段落y所述的计算机可读存储介质,其中,所述la的麦克风是定向麦克风,并且所述la是线性差分定向麦克风阵列(lddma)。
[0069]
aa.如段落z所述的计算机可读存储介质,其中,所述lddma是均匀lddma或非均匀lddma中的一种。
[0070]
ab.如段落y所述的计算机可读存储介质,其中,所述约束矩阵是大小为(n 1)x m的矩阵,其中,n是所述la的差分波束成形阶数,m是麦克风数量。
[0071]
ac.如段落y所述的计算机可读存储介质,其中,所述麦克风响应矩阵是基于定向麦克风的波束模式导出的,该定向麦克风具有声音入射角、转向方向和所述定向麦克风的特性。
[0072]
ad.如段落ac所述的计算机可读存储介质,其中,所述定向麦克风的特性包括全向性、心形和偶极性。
[0073]
ae.如段落y所述的计算机可读存储介质,其中,通过对所述约束矩阵应用最小范数解,以获得所述波束形成器,所述约束矩阵包括最大化白噪声增益(wng)。
[0074]
af.如段落y所述的计算机可读存储介质,其中,计算所述所需方向的所述波束形成器,包括在所需频率下计算所述所需方向的波束形成器。
[0075]
ag.如段落af所述的计算机可读存储介质,其中,所述计算所需方向的波束形成器是基于通过所述la接收到的时域逐帧传感器信号。
[0076]
ah.如段落ag所述的计算机可读存储介质,还包括:将所有所述时域逐帧传感器信号转换成频域传感器值。
[0077]
ai.如段落ah所述的计算机可读存储介质,还包括:计算频域传感器值和波束形成器矢量的点积,所述波束形成器矢量与波束形成器的复值权重相关联。
[0078]
aj.如段落ai所述的计算机可读存储介质,其中,基于所述预选参数和所述波束形成器构造所述la包括基于所述点积构造所述la。结论
[0079]
尽管已经以特定结构特征和/或方法行为的语言描述了主题,但是应当理解,在所附权利要求中定义的主题不一定限于所描述的特定特征或行为。相反,具体特征和动作被公开为实施权利要求的示例性形式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。