lidar设备中的回射器检测和避开
1.本技术要求于2020年9月22日提交的第17/028847号美国专利申请和于2019年11月29日提交的第62/941,989号美国临时专利申请的优先权,其全部内容通过引用并入本文。
背景技术:
2.除非本文另有说明,否则本部分中描述的材料不是本技术中的权利要求的现有技术,并且不因包括在本部分中而被承认是现有技术。
3.光检测和测距(lidar)设备可以估计到给定环境中的对象的距离。例如,lidar设备的发射器子系统可以发射近红外光脉冲,其可以与设备环境中的对象交互。光脉冲的至少一部分可以被重定向回lidar(例如,由于反射或散射)并由检测器子系统检测。常规的检测器子系统可以包括多个检测器和对应的控制器,该控制器被配置为以高时间分辨率确定各个光脉冲的到达时间。可以基于与给定对象交互的对应光脉冲的飞行时间来确定lidar设备与给定对象之间的距离。
技术实现要素:
4.在第一方面,提供了一种方法。该方法涉及由光检测和测距(lidar)设备的光发射器将第一光脉冲发射到视场中。该方法还涉及确定lidar设备的检测器在第一测量时间段期间检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲。检测器被配置为检测来自视场内的光。该方法另外涉及响应于检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲,在一个或更多个后续测量时间段期间停用光发射器。所述一个或更多个后续测量时间段发生在第一测量时间段之后。
5.在第二方面,提供了一种光检测和测距(lidar)设备。lidar设备包括被配置为将光脉冲发射到视场中的光发射器、被配置为检测来自视场内的光的检测器、以及被配置为执行操作的控制器。所述操作包括:(i)控制光发射器将第一光脉冲发射到视场中;(ii)确定检测器在第一测量时间段期间检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲;以及(iii)响应于检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲,在一个或更多个后续测量时间段期间停用光发射器。所述一个或更多个后续测量时间段发生在第一测量时间段之后。
6.在一些实施例中,操作还可以包括确定何时重新激活光发射器。确定何时重新激活光发射器可以涉及确定检测器在第一测量时间段之后发生的第二测量时间段期间是否检测到指示回射器或其他高反射对象的反射的附加光脉冲。响应于确定检测器在第二测量时间段期间检测到指示回射器或其他高反射对象的反射的附加光脉冲,在第二测量时间段之后发生的第三测量时间段期间停用光发射器。响应于确定检测器在第二测量时间段期间未检测到指示由回射器或其他高反射对象的反射的附加光脉冲,在第二测量时间段之后发生的第三测量时间段期间重新激活光发射器。
7.在一些实施例中,光发射器在第一测量时间段期间发射第一光脉冲,并且确定检
测器在第一测量时间段期间检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲包括:确定检测器在第一测量时间段期间检测到反射光脉冲;以及至少基于反射光脉冲的形状来确定反射光脉冲指示由回射器或其他高反射对象的反射。
8.在一些实施例中,所述光发射器是主光发射器,lidar设备还包括次光发射器,并且主光发射器在第一测量时间段之前发生的先前测量时间段期间发射第一光脉冲。所述操作还包括:控制次光发射器在第一测量时间段期间发射次光脉冲,其中,次光脉冲具有比第一光脉冲低的强度;以及控制主光发射器在第一测量时间段期间不发射光。此外,确定检测器在第一测量时间段期间检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲可以包括:确定检测器在第一测量时间段期间检测到反射光脉冲;以及至少基于反射光脉冲具有超过预定阈值的量值来确定反射光脉冲指示由回射器或其他高反射对象的反射。
9.在一些实施例中,所述光发射器是主光发射器,lidar设备还包括次光发射器,主光发射器在第一测量时间段期间发射第一光脉冲,并且操作包括控制次光发射器在第一测量时间段期间发射次光脉冲,其中,第一光脉冲和次光脉冲在时间上分开预定时间差,并且,其中,次光脉冲具有比第一光脉冲低的强度。此外,确定检测器在第一测量时间段期间检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲包括:确定检测器在第一测量时间段期间的第一时间检测到第一反射光脉冲并且在第一测量时间段期间的第二时间检测到第二反射光脉冲;以及至少基于第一时间和第二时间之间的时间差对应于预定时间差来确定第一反射光脉冲和第二反射光脉冲指示回射器或其他高反射对象的反射。
10.在一些实施例中,操作还包括:从lidar设备向计算设备发送指示回射器或其他高反射对象在光发射器的视场内并且在第一测量时间段期间被检测到的信息。
11.在第三方面,提供了一种用于扫描自动驾驶载具的环境的方法。该方法可以包括确定环境的可以包括回射器的部分。确定环境的可以包括回射器的部分可以包括至少基于反射光脉冲的形状来确定反射光脉冲指示回射器的反射。该方法还可以包括选择性地改变lidar扫描那些部分的能力。选择性地改变lidar扫描那些部分的能力可以包括选择性地防止lidar将光发送到环境的可以包括回射器的那些部分。选择性地防止lidar将光发送到环境的可以包括回射器的那些部分可以包括选择性地防止一个或更多个发送器在特定时间发射光。选择性地改变lidar扫描那些部分的能力可以替代地或附加地包括由相同或次光发射器发射次光脉冲,其中,次光脉冲具有比第一光脉冲低的强度。
12.在第四方面,提供了一种用于lidar到lidar通信的方法。该方法涉及由计算设备从耦接到载具的第一lidar设备接收数据,其中,该数据包括指示由第一lidar设备检测到的回射器的位置的信息。该方法还包括由计算设备确定回射器的位置在耦接到载具的第二lidar设备的视场内。该方法还包括由计算设备向第二lidar设备发送消息,其中,该消息包括指示回射器在第二lidar设备的视场内的信息。
13.通过适当地参考附图阅读以下详细描述,这些以及其他方面、优点和替代方案对于本领域普通技术人员将变得清楚。此外,应当理解,在本发明内容部分和本文档中的其他地方提供的描述旨在通过示例而非限制的方式说明所要求保护的主题。
附图说明
14.图1是根据示例实施例的lidar设备的简化框图。
15.图2示出了根据示例实施例的lidar设备的截面图。
16.图3示出了根据示例实施例的lidar设备的多个透射/接收通道的视场(fov)的示例排列。
17.图4a示出了根据示例实施例的载具。
18.图4b示出了根据示例实施例的载具。
19.图4c示出了根据示例实施例的载具。
20.图4d示出了根据示例实施例的载具。
21.图4e示出了根据示例实施例的载具。
22.图5是根据示例实施例的方法的流程图。
23.图6a-6c示出了根据示例实施例的lidar设备扫描回射器所在的其环境的一部分的场景。图6a示出了在第一时间点的场景。图6b示出了在第二时间点的场景。图6c示出了在第三时间点的场景。
24.图7a-7d是示出根据示例实施例的在lidar设备的光发射器的视场中检测到回射器、响应性地停用回射器并且随后当回射器不再处于光发射器的视场中时重新激活回射器的场景的时序图。图7a是该场景中的第一测量时间段的时序图。图7b是该场景中的第二测量时间段的时序图。图7c是该场景中的第三测量时间段的时序图。图7d是该场景中的第四测量时间段的时序图。
25.图8a-8d是示出根据示例实施例的在lidar设备的主光发射器的视场中检测到回射器、响应性地停用回射器并且随后当回射器不再处于主光发射器的视场中时重新激活回射器的场景的时序图。图8a是该场景中的第一测量时间段的时序图。图8b是该场景中的第二测量时间段的时序图。图8c是该场景中的第三测量时间段的时序图。图8d是该场景中的第四测量时间段的时序图。
26.图9a-9d是示出根据示例实施例的在lidar设备的主光发射器的视场中检测到回射器、响应性地停用回射器并且随后当回射器不再处于主光发射器的视场中时重新激活回射器的场景的时序图。图9a是该场景中的第一测量时间段的时序图。图9b是该场景中的第二测量时间段的时序图。图9c是该场景中的第三测量时间段的时序图。图9d是该场景中的第四测量时间段的时序图。
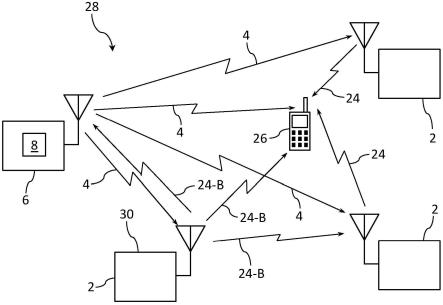
27.图10是根据示例实施例的支持lidar设备之间的信息共享的系统的框图。
28.图11是根据示例实施例的方法的流程图。
具体实施方式
29.本文描述了示例性实现方式。应当理解,词语“示例性”在本文中用于表示“用作示例、实例或说明”。本文中描述为“示例性”或“说明性”的任何实现方式或特征不一定被解释为比其他实现方式或特征优选或有利。在附图中,除非上下文另有规定,否则类似的符号通常标识类似的组件。本文描述的示例实现方式并不意味着限制。将容易理解的是,如本文一般描述的和在附图中示出的,本公开的各方面能够以各种不同的配置来布置、替换、组合、分开和设计。
30.i.概述
31.光检测和测距(lidar)设备可以包括一个或更多个光发射器和一个或更多个检测器,光发射器被配置为将光脉冲发射到lidar设备的环境中,检测器被配置为检测返回的光脉冲,返回的光脉冲对应于由环境中的一个或更多个对象对发射的光脉冲的反射。能够使用发射光脉冲的时间与检测到光脉冲的反射的时间之间的时间差来确定lidar设备与反射光脉冲的对象之间的距离。另外,能够基于光发射器发射光脉冲的方向来确定到对象的方向。能够例如根据方位角或偏航角(例如,水平面中的角度)和/或仰角(例如,相对于水平面的角度)来表征到对象的方向。
32.在一些实现方式中,lidar设备可以在连续的测量时间段中发射和检测光脉冲。每个测量时间段可以包括光发射器发射光脉冲的发射时间段,随后是检测器“侦听”任何返回的光脉冲的检测时间段。在一些实施例中,光发射器发射光脉冲的方向可以从一个测量时间段改变到另一个测量时间段(例如,由于lidar设备的旋转或其他运动,反射镜或其他光束转向设备的偏转,或以某种方式)。以这种方式,lidar设备可以扫描其环境的一部分。
33.在一些实现方式中,lidar设备可以包括多个光发射器和多个检测器。每个光发射器可以被配置为在不同方向上发射光脉冲,并且每个检测器可以被配置为检测来自不同方向的反射光脉冲。对应于多个光发射器和检测器的不同方向可以覆盖方位角范围和/或仰角范围。在实践中,来自光发射器的发射光脉冲可以具有限定光发射器的视场的光束宽度。类似地,每个检测器可以被配置为检测来自限定检测器的视场的方向范围的光。光发射器的各个视场可以是重叠的或非重叠的,并且检测器的各个视场可以是重叠的或非重叠的。在一些实现方式中,每个光发射器可以与具有与光发射器相同或相似的视场的对应检测器配对。与对应的检测器配对的光发射器可以限定lidar设备的透射/接收通道。因此,包括多个光发射器和多个检测器的lidar设备可以具有多个透射/接收通道,其中,每个通道具有构成lidar设备的整体视场的一部分的各个视场。
34.通常,由检测器检测到的反射光脉冲的强度取决于各种因素,包括发射光脉冲的强度、到反射光脉冲的对象的距离、相对于对象表面的入射角、对象表面的反射率以及对象表面是漫反射(例如,以朗伯反射图案)还是镜面反射光(如镜子)。假设其他因素等同,则反射性更强的对象通常比反射性更弱的对象产生更高强度的反射光脉冲。具有足够高反射率(例如,根据应用,大于80%、大于90%、大于95%或大于99%的反射率)的对象可以被分类为“高反射对象”,诸如“回射器”。此外,如果术语“反射率”被定义为有效朗伯反射率,则“回射器”可以具有大于100%的反射率。回射器的常见示例包括汽车、卡车、自行车和其他载具上的道路标志、车道标记以及前反射器、侧反射器和后反射器。在一些情况下,来自回射器或其他高反射对象的反射光脉冲能够非常强烈,以至于导致lidar设备的期望操作的各种问题。
35.可能由回射器或其他高反射对象引起的一个问题是范围混叠。当在第一测量时间段中发射的光脉冲由足够远而以至于在第二测量时间段中检测到反射光脉冲的回射器反射时,则可能出现该问题。当发生这种情况时,会难以确定反射光脉冲是在第一测量时间段期间发射的光脉冲还是在第二测量时间段期间发射的光脉冲的反射。这进而会产生关于如何确定到生成反射光脉冲的对象的距离的模糊性。
36.可能由回射器或其他高反射对象引起的另一个问题是串扰。如上所述,lidar设备
可以包括被排列为提供多个透射/接收通道的多个光发射器和多个检测器,其中,每个通道具有各自的视场。然而,实际上,来自一个通道的少量光可能被散射到另一个通道中。在一些情况下,这种散射可能是lidar设备内的通道之间的不完全隔离的结果。可替代地或另外地,(例如,由于划痕、条纹、水滴或其他缺陷或碎屑)散射可以发生在lidar设备的窗口、透镜或其他光学组件的表面处。散射也可以发生在lidar设备的外部。例如,雾、雨和雪能够散射光。
37.这种散射能够影响从lidar设备透射到lidar设备的环境中的光,并且还能够影响由lidar设备从环境接收的光。关于透射光,在第一通道中发射的一些光可以被散射到第二通道(例如,相邻通道)的视场中。由该散射产生的杂散光可能被第二通道的视场中的对象反射,这可以导致来自对象的反射杂散光被第二通道中的检测器检测到。关于接收到的光,由第一通道的视场中的对象反射的一些光可以被散射到第二通道的视场中。由该散射产生的杂散光可以被第二通道中的检测器检测。
38.为了解决来自一个通道的光被散射到另一个通道中的可能性,可以使用阈值来确定是否使用检测到的光脉冲来进行距离确定。在该方法中,如果检测器检测到超过阈值的光脉冲(例如,脉冲的高度、综合面积或量值的其他测量超过阈值),则检测到的光脉冲可以被认为是由检测器的对应光发射器发射的光脉冲的反射,并且基于此,可以用于距离确定。另一方面,如果检测器检测到不超过阈值的光脉冲,则光脉冲可以被认为是散射光或噪声的结果,并且基于此不用于距离确定。
39.然而,当回射器或其他高反射对象在特定通道的视场内时,这种阈值方法可能是不足的。当特定通道中的光发射器朝向反射器发射光脉冲时,来自回射器的反射光脉冲的强度能够足够高,使得反射光散射到一个或更多个其他通道中会导致其他通道之一中的检测器检测到超过阈值的光脉冲。这又可能导致虚假距离确定。此外,即使当特定通道中的光发射器关闭时,由于在其他通道中发射的光的散射,大量杂散光也可能到达回射器。回射器会反射该杂散光,导致特定通道中的检测器检测到超过阈值的光脉冲。
40.除了范围混叠和串扰之外,回射器或其他高反射对象会导致lidar设备中的检测器饱和、晕开和其他类型的误差。
41.为了减轻会由回射器或其他高反射对象引起的误差,本文公开了用于检测回射器或其他高反射对象何时在光发射器的视场中,用于当回射器或其他高反射对象在光发射器的视场中时停用光发射器,以及用于当回射器或其他高反射对象不再在光发射器的视场中时重新激活光发射器的方法和系统。
42.在一些示例中,可以基于反射光脉冲的特征形状来检测回射器或其他高反射对象。如果检测器在第一测量时间段期间基于反射光脉冲的形状检测到指示回射器或其他高反射对象的反射的反射光脉冲,则可以在一个或更多个后续测量时间段期间停用检测器的对应光发射器。在一个或更多个后续测量时间段期间停用光发射器可以涉及控制光发射器,使得其在一个或更多个后续测量时间段期间不发射光(例如,不照射回射器)。可替代地,在一个或更多个后续测量时间段期间停用光发射器可以涉及控制光发射器,使得光发射器在一个或更多个后续测量时间段期间以降低的水平发射光(例如,具有降低的脉冲能量和/或强度的光脉冲)。有利地,即使光发射器仍然可以朝向回射器发射一些光,降低的光发射水平也能够足够低,使得串扰大大减少或消除。
43.在一些示例中,次光发射器可以用于检测回射器或其他高反射对象。次光发射器可以发射与由用于距离确定的主光发射器发射的光脉冲相比具有低强度的次光脉冲。另外,次光发射器可以将次光脉冲发射到涵盖lidar设备的各种发送/接收通道的视场的宽视场中。因此,任何通道中的检测器可以潜在地检测由次光脉冲的反射产生的反射光脉冲。然而,次光脉冲的强度可以足够低,使得仅当次光脉冲被检测器的视场中的回射器或其他高反射对象反射时,检测器通常才会检测到反射光脉冲(例如,高于阈值的检测)。
44.在一种方法中,次光发射器在第一测量时间段期间发射次光脉冲,其中,在第一测量时间段中,发送/接收通道的主光发射器不发射光。如果检测器在第一测量时间段期间检测到具有超过阈值的量值(例如,峰值或积分面积)的反射光脉冲,则反射光脉冲指示回射器或其他高反射对象的反射。作为响应,可以在一个或更多个后续测量时间段期间停用检测器的对应主光发射器。
45.在另一种方法中,在第一测量时间段期间,主光发射器发射主光脉冲,并且次光发射器发射次光脉冲。主光脉冲和次光脉冲在时间上以预定时间差分开。如果主光发射器的对应检测器在第一测量时间段期间检测到在时间上分开预定时间差的两个反射光脉冲,则这两个反射光脉冲指示由反射器或其他高反射对象的反射。作为响应,可以在一个或更多个后续测量时间段期间停用检测器的对应主光发射器。
46.当光发射器在一个或更多个后续测量时间段内被停用时,光发射器的对应检测器可以在每个后续测量时间段中继续检测光。如果检测器在后续测量时间段期间检测到指示回射器或其他高反射对象的反射的反射光脉冲,则回射器仍然在光发射器的视场中。作为响应,光发射器保持停用。然而,如果检测器在后续测量时间段期间没有检测到指示回射器或其他高反射对象的反射的反射光脉冲,则回射器不再处于光发射器的视场中。作为响应,可以重新激活光发射器。
47.ii.示例系统
48.图1是根据示例实施例的lidar设备100的简化框图。如图所示,lidar设备100包括一个或更多个主光发射器102、一个或更多个次光发射器104、一个或更多个检测器106、主发射器电路108、次发射器电路110、检测器电路112、一个或更多个主光学元件114、一个或更多个次光学元件116、光学窗口118、壳体120、旋转平台122、固定平台124、一个或更多个致动器126和控制器128。在一些实施例中,系统100可以包括更多、更少或不同的组件。另外,所示的组件可以以任何数量的方式组合或划分。
49.主光发射器102被配置为例如以脉冲的形式发射光。每个光脉冲能够具有适合于确定到环境中的对象的距离的持续时间。例如,每个光脉冲能够具有在2纳秒和5纳秒之间的持续时间。其他脉冲持续时间也是可行的。由主光发射器102发射的光能够具有窄范围的波长。例如,主光发射器102能够包括激光二极管、激光二极管条、垂直腔表面发射激光器(vcsel)、光纤激光器或其他窄带光源。可替代地,主光发射器102能够发射具有更宽波长范围的光。例如,主光发射器102能够包括发光二极管(led)。其他类型的光源也是可行的。由主光发射器102发射的波长可以例如在电磁光谱的紫外、可见和/或红外部分中。在示例实施例中,主光发射器102包括发射波长为约905纳米的光的激光二极管。
50.在一些实施例中,lidar设备100可以仅包括一个主光发射器102。在其他实施例中,lidar设备100可以包括多个主光发射器102。多个主光发射器102中的每个主光发射器
可以被配置为例如基于主光发射器相对于主光学元件114的位置来发射照亮各个视场的光。主光发射器102的各个视场能够是重叠的或非重叠的。
51.次光发射器104被配置为例如以脉冲的形式发射光。由次光发射器104发射的光脉冲能够具有与由主光发射器102发射的光脉冲相同或相似的持续时间,但是能够具有更高或更低的脉冲能量。例如,主光发射器102可以发射具有约76nj的脉冲能量的光脉冲,而次光发射器104可以发射具有约1μj的脉冲能量的光脉冲。尽管脉冲能量可以更高,但是来自次光发射器104的光的强度可以低于主光发射器102的光的强度,这是因为来自次光发射器104的光可以在更宽的视场上扩散(例如,通过次光学元件116)。由次光发射器104发射的光的波长能够与由主光发射器102发射的光的波长相同或相似。在示例实施例中,主光发射器102和次光发射器104两者发射近红外范围内的光。与主光发射器102类似,次光发射器104可以包括窄带光源(诸如激光二极管、激光二极管条、vcsel或光纤激光器)或宽带光源(诸如led)。其他类型的光源也是可行的。
52.在示例实施例中,lidar设备100仅包括一个次光发射器104。单个次光发射器104可以被配置为发射照亮视场的光,该视场涵盖主光发射器102的各个视场。来自次光发射器104的光可以具有比来自主光发射器102中的每一个的光低的强度,这是由于光在更宽的视场上扩散。在这样的实施例中,次光发射器104可以被描述为“闪光照明器”或“泛光照明器”。
53.检测器106可以包括任何类型的光检测器,其被排列为拦截和检测由主光发射器102和次光发射器104发射的光从环境返回到lidar设备100的反射。示例检测器106包括光电二极管、雪崩光电二极管(apd)、硅光电倍增器(sipm)、单光子雪崩二极管(spad)、多像素光子计数器(mppc)、光电晶体管、有源像素传感器(aps)、电荷耦合器件(ccd)、低温检测器和/或能够检测具有由主光发射器102和次光发射器104发射的波长的光的任何其他检测器。
54.在示例实施例中,检测器106与主光发射器102配对以形成多个发送/接收通道。在每个发送/接收通道中,主光发射器被配置为将光发射到各个视场中,并且与主光发射器配对的检测器被配置为接收和检测来自相同或相似视场的光。
55.主发射器电路108包括能够例如在控制器128的控制下在特定测量时间段内选择性地激活和停用主光发射器102中的各个主光发射器的电路。为了在特定测量时间段内激活所选择的主光发射器,主发射器电路108可以包括电容器(或其他能量存储设备),其被充电并且然后放电,使得电流流过所选择的主光发射器。流过所选择的主光发射器的电流使所选择的主光发射器在特定测量时间段期间发射光脉冲。为了在特定测量时间段内停用所选择的主光发射器,主发射器电路108可以不对电容器充电,或者可以对电容器充电并且然后以使得很少或没有电流流过所选择的主光发射器的方式使电容器放电(例如,电容器能够通过不流过所选择的主光发射器的电流路径放电)。结果,所选择的主光发射器在特定测量时间段期间不发射光脉冲(或发射具有减小的强度或脉冲能量的光脉冲)。
56.次发射器电路110包括使次光发射器104中的一个或更多个在一个或更多个测量时间段中发射光脉冲的电路。在一些实施例中,次发射器电路110使次光发射器104在主光发射器102不发射光的专用测量时间段期间发射光脉冲。这种专用测量时间段可以用于基于由检测器106检测到的由次光发射器104发射的光脉冲的反射来映射出回射器在环境中
的位置。专用测量时间段之后可以是一个或更多个标准测量时间段。在标准测量时间段中,主光发射器102能够被选择性地激活以发射光脉冲,或者被停用以避免照射回射器,同时一个或更多个次光发射器104不发射光。
57.在其他实施例中,次发射器电路110控制次光发射器104在每个测量时间段中发射光脉冲。例如,在每个测量时间段期间,次发射器电路110可以使次光发射器104在由主光发射器102发射光脉冲之后的某个时间段(例如,50纳秒)发射光脉冲。可替代地,次发射器电路110可以使次光发射器104在由主光发射器102发射光脉冲之前或同时发射光脉冲。
58.检测器电路112被配置为基于由检测器106中的每一个检测到的光来输出各个信号。例如,检测器电路112可以针对每个检测器106包括被配置为在不同时间对检测器的输出进行采样的相应模数转换器(adc),以便在每个时间输出对应于检测到的光信号(例如,由检测到的光子产生的电流)的数字值。可以基于发射光脉冲的脉冲持续时间来选择adc的采样率,以便获得每个反射脉冲的多个样本。例如,如果发射的光脉冲具有2纳秒的脉冲持续时间,则adc可以每100至500皮秒对检测器的输出进行采样。以这种方式确定的数字值可以用于将由检测器检测到的反射光脉冲的形状确定作为时间的函数(例如,包括上升沿、峰值和下降沿)。
59.主光学元件114可以包括一个或更多个透镜、反射镜、光导、孔径、漫射器和/或将由主光发射器102发射的光引导到lidar设备100的环境中并且将来自环境的反射光引导到检测器106的其他光学元件。在示例实施例中,主光学元件114将主光发射器102与检测器106配对以形成一个或更多个透射/接收通道。在这样的实施例中,每个透射/接收通道与各自的视场相关联,并且,主光学元件114将来自通道的主光发射器的光引导到通道的特定视场中,并且将来自通道的特定视场内的反射光引导到通道的对应检测器。
60.次光学元件116可以包括一个或更多个透镜、反射镜、光导、孔径、漫射器和/或将由次光发射器104发射的光引导到lidar设备100的环境中的其他光学元件。在示例实施例中,次光学元件116将由次光发射器104发射的光扩散到涵盖主光发射器102和检测器106的各个视场的视场中。
61.在一些实施例中,lidar设备100被配置为旋转。如图1所示,lidar设备100包括在致动器122的控制下相对于固定平台120旋转的旋转平台118。固定平台120能够例如安装在载具上。主光发射器102、次光发射器104、检测器106、主发射器电路108、次发射器电路110、检测器电路112、主光学元件114和次光学元件116能够安装在旋转平台118上或耦接到旋转平台118。致动器122可以包括一个或更多个马达、气动致动器、液压活塞和/或压电致动器和/或任何其他类型的致动器。致动器122可以被操作(例如,通过控制器128)以使旋转平台118围绕旋转轴旋转。在一些实施例中,旋转轴可以是竖直轴。例如,lidar设备100可以安装在载具上,并且旋转轴可以大致垂直于载具正在其上操作的路面。在一些实施例中,旋转平台118可以以3-30hz的速率旋转整个360度。其他旋转速率也是可行的。在其他实施例中,旋转平台118可以旋转小于360度。例如,旋转平台118可以在一定角度范围内来回旋转。在一些实施例中,旋转平台118可以在多个测量时间段期间连续旋转lidar设备100。在其他实施例中,旋转平台118可以不提供连续旋转,而是可以替代地用于在不同时间(例如,响应于识别环境中的某些感兴趣区域)调整lidar设备100的定向。
62.如图1所示,lidar设备100包括壳体124,壳体124包围主光发射器102、次光发射器
104、检测器106、主发射器电路108、次发射器电路110、检测器电路112、主光学元件114和次光学元件116。壳体124可以耦接到旋转平台118。在一些实施例中,壳体124对于由主光发射器102和次光发射器104发射的光可以是透明的。在其他实施例中,壳体124可以是不透明的,但是可以包括光学窗口126,该光学窗口126对于由主光发射器102和次光发射器104发射的光是透明的。例如,主光学元件114和次光学元件116可以被排列为将由主光发射器102和次光发射器104发射的光通过光学窗口126引导到lidar设备100的环境中,并且可以被排列为将通过光学窗口126进入lidar设备100的来自环境的反射光引导到检测器106。
63.在一些实施方案中,主光学元件114可以限定从主光发射器102到光学窗口126的第一光路,并且次光学元件116可以限定从次光发射器104到光学窗口126的第二光路。第一光路和第二光路能够是分离的。可替代地,第一光路和第二光路能够部分重叠。
64.控制器128可以包括一个或更多个处理器130和数据存储装置132。处理器130可以包括一个或更多个通用处理器和/或一个或更多个专用处理器(例如,数字信号处理器等)。数据存储装置132可以包括可以由处理器130读取或访问的一个或更多个非暂时性计算机可读存储介质或可以采取所述一个或更多个非暂时性计算机可读存储介质的形式。数据存储装置132能够包括易失性和/或非易失性存储组件,诸如电、光、磁、有机或其他存储器或盘存储装置,其可以全部或部分地与处理器130中的至少一个集成。除了处理器130和数据存储装置132之外或代替处理器130和数据存储装置132,控制器128可以包括其他类型的模拟和/或数字电路。例如,控制器128可以包括现场可编程门阵列(fpga)或专用集成电路(asic)。
65.在一些示例中,数据存储器132可以存储可由处理器130执行以使lidar设备100执行本文描述的各种操作的程序指令。例如,控制器128可以通过主发射器电路108控制主光发射器102(例如,激活和停用主光发射器102中的各个光发射器),并且可以通过次光发射器电路110控制次光发射器104。控制器128还可以从检测器电路112接收数据(例如,具有对应时间戳的adc值),并且可以分析该数据以检测反射光脉冲并识别指示回射器的反射的反射光脉冲。控制器128还可以控制致动器122,以便控制lidar设备100的旋转。控制器128也可以执行其他操作。此外,结合某些操作,控制器128可以与lidar设备100外部的计算设备或其他组件通信。例如,在lidar设备100耦接到自主驾驶载具的实现方式中,控制器128可以向控制载具的自动驾驶操作的计算设备发送数据并从其接收指令。
66.图2是根据示例实施例的lidar设备200的截面图。在该示例中,lidar设备200被配置为在旋转方向202上围绕旋转轴旋转。图2的截面图在垂直于旋转轴的平面中。旋转轴能够是垂直轴,促使旋转方向202上的旋转使得lidar设备200能够扫描环境中的方位角范围。可替代地或附加地,lidar设备200能够围绕水平轴旋转以扫描仰角范围,或者能够被配置为以某种其他方式扫描环境的一部分。
67.如图所示,lidar设备200包括封装在壳体204和光学窗口206内的各种光学组件。lidar设备200的光学组件包括由主光发射器208和210例示的多个主光发射器、次光发射器212以及由检测器218和220例示的多个检测器。在该示例中,主光发射器208与检测器218配对以提供第一透射/接收通道,并且主光发射器210与检测器220配对以提供第二透射/接收通道。尽管图2示出了两个主光发射器和两个检测器,但是应当理解,lidar设备200能够包括任何数量的主光发射器和检测器以提供任何数量的透射/接收通道。
68.在该示例中,lidar设备200包括远心透镜组件224,远心透镜组件224包括安装在耦接到光学窗口206的透镜镜筒/挡板结构230中的多个透镜(由透镜226和228例示)。远心透镜组件224被排列为将从主光发射器208和210发射的光通过光学窗口206引导到lidar设备200的环境中,以便分别照射视场240和242。远心透镜组件224还被排列为将通过光学窗口206进入lidar设备200的来自环境的反射光分别从视场240和242内引向检测器218和220。
69.视场240和242分别部分地由孔径250和252限定。孔径250和252可以是形成在不透明材料(示出为孔板254)中的针孔孔径(例如,直径在100微米和500微米之间)。为了说明的目的,图2仅示出了两个孔径。然而,应当理解,孔板254可以包括任何数量的孔径,其中,每个孔径针对包括相应主光发射器和相应检测器的相应透射/接收通道限定相应视场。孔板254中的孔径能够以一维阵列、二维阵列或一些其他图案排列。透射/接收通道的各种视场可以一起为lidar设备200提供整体视场244。
70.孔径250和252位于远心透镜组件224与检测器218和220之间的远心透镜组件224的焦平面处。利用这种配置,来自视场240和242的光通过远心透镜组件224聚焦在孔径250和252内,并且聚焦的光此后朝向检测器218和220发散。如图所示,检测器218拦截来自孔径250的发散光256,并且检测器220拦截来自孔径252的发散光258。有利地,检测器218和220可以均包括单光子检测器阵列,其覆盖大致上与由发散光256和258照射的区域匹配的区域,以便提供具有高动态范围的单光子检测。例如,检测器218和220可以均包括sipm。
71.如图所示,由主光发射器208和210发射的光分别由光导260和262引导到孔径250和252。更具体地,由主光发射器208和210发射的光被耦接到光导260和262的输入端中(例如,经由各个圆柱形透镜),并且光导260和262通过全内反射将光从其各个输入端引导到被定位在孔径250和252附近的各个输出端。光导260和262的输出端包括反射成角度的表面,该反射成角度的表面将从光导260和262出来的被引导光的至少一部分分别朝向孔径250和252反射。远心透镜组件224使从光导260和262发射的光通过孔径250和252准直,并使准直的光通过光学窗口206分别透射到视场240和242中。
72.次光发射器212发射由菲涅耳透镜260准直然后由漫射器262漫射的光。来自漫射器262的漫射光透射通过光学窗口206以照射视场,该视场(远离lidar设备200超过一定距离)涵盖lidar设备200的视场240和242以及整体视场244。次光发射器212、菲涅耳透镜260和漫射器262可以安装到坐标系264,坐标系264附接到透镜镜筒/挡板结构224并且耦接到光学窗口206。
73.图3示出了lidar设备(诸如lidar设备100或lidar设备200)的透射/接收通道的视场(fov)的示例排列300。在该示例中,fov以二维阵列排列,其中,四个fov水平排列(由fov 302-308例示)并且八个fov垂直排列(由fov 308-322例示)。在其他示例中,能够水平地排列更多或更少数量的fov,并且能够垂直地排列更多或更少数量的fov。另外,虽然图3示出了以二维阵列排列的fov,但是fov能够以一维阵列或以某种其他图案排列。在图3中,每个fov被示出为大致圆形。然而,在实践中,透射/接收通道的fov能够是椭圆形、正方形、矩形、梯形或一些其他形状。
74.图3还示出了fov 330,其对应于由一个或更多个次光发射器(诸如图1中所示的次光发射器104或图2中所示的次光发射器212)照射的区域。如图所示,次光发射器的fov 330
涵盖透射/接收通道的fov。此外,虽然fov330在图3中被示出为矩形,但是fov 330可以是正方形、圆形、椭圆形、梯形或一些其他形状。
75.因为来自次光发射器的光在比透射/接收通道的fov(例如,fov 302-322)宽的fov(例如,fov 330)上展开,所以来自次光发射器的光可以具有比来自每个主光发射器的光低的强度。例如,来自次光发射器的光的强度可以低一个数量级、低两个数量级或低三个或更多个数量级。
76.尽管图1和图2示出了lidar设备100和200的示例配置,并且图3示出了由此产生的示例fov,但是应当理解,其他配置也是可行的。例如,lidar设备100和200被示出为能够旋转。然而,非旋转lidar设备也是可行的。此外,虽然lidar设备100和200包括用于检测回射器的一个或更多个次光发射器,但是一些lidar设备可以包括一个或更多个主光发射器但不包括次光发射器。在这样的lidar设备中,可以分析主光发射器的反射光脉冲以确定它们是否已经由回射器反射。
77.图4a-4e示出了根据示例实施例的载具400。载具400可以是半自动或全自动驾驶载具。虽然图4a-4e将载具400示出为汽车(例如,小型货车),但是将理解,载具400能够包括能够使用传感器和关于其环境的其他信息在其环境内导航的另一种类型的自动驾驶载具、机器人或无人机。
78.载具400可以包括一个或更多个传感器系统402、404、406、408和410。在示例实施例中,传感器系统402、404、406、408和410均包括各自的lidar设备。另外,传感器系统402、404、406、408和410中的一个或更多个可以包括雷达设备、相机或其他传感器。在示例实施例中,传感器系统402可以耦接到载具400的顶部,传感器系统404可以耦接到载具400的前侧,传感器系统406可以耦接到载具400的后侧,传感器系统408可以耦接到载具400的右侧,并且传感器系统410可以耦接到载具400的左侧。在其他实施例中,一个或更多个传感器系统能够耦接到载具的其他部分。
79.传感器系统402、404、406、408和410的lidar设备可以被配置为围绕轴(例如,图4a-4e中所示的z轴)旋转,以便用光脉冲照射载具400周围的环境的至少一部分并检测反射光脉冲。基于反射光脉冲的检测,可以确定关于环境的信息。从反射光脉冲确定的信息可以指示到载具400周围环境中的一个或更多个对象的距离和方向。例如,该信息可以用于生成与载具400的环境中的物理对象有关的点云信息。该信息还能够用于确定环境中的对象的反射率、环境中的对象的材料组成或关于载具400的环境的其他信息。
80.传感器系统402、404、406、408和410的lidar设备可以具有可以重叠的不同视场。例如,在图4a-4e所示的配置中,传感器系统402的lidar设备可以具有围绕载具延伸360度的长距离视场,而传感器系统404、406、408和410的lidar设备可以具有覆盖载具400前侧、后侧、右侧和左侧的各个方向的较短距离视场。传感器系统404、406、408和410的lidar设备的每个相应视场的至少一部分可以与传感器系统402的lidar设备的视场重叠。
81.从传感器系统402、404、406、408和410中的一个或更多个获得的信息可以用于诸如当载具400以自动或半自动驾驶模式操作时控制载具400。例如,该信息能够用于确定路线(或调整现有路线)、速度、加速度、载具定向、制动操纵或载具400的其他驾驶行为或操作。
82.iii.示例方法和时序图
83.本文描述了可以在lidar设备100和200中实现的示例方法和过程。然而,所描述的方法和过程能够在与lidar设备100和200不同地配置的lidar设备中实现。
84.图5是根据示例实施例的方法500的流程图。例如,方法500呈现了能够与任何lidar设备100和/或lidar设备200一起使用的方法的实施例。方法500可以包括如框502-506中的一个或更多个所示的一个或更多个操作、功能或动作。
85.另外,对于方法500和本文公开的其他过程和方法,流程图示出了本实施例的一个可能实现的功能和操作。在这方面,每个框可以表示模块、段、制造或操作过程的一部分、或程序代码的一部分,其包括可由处理器执行的用于实现过程中的特定逻辑功能或步骤的一个或更多个指令。程序代码可以存储在任何类型的计算机可读介质上,例如,诸如包括盘或硬盘驱动器的存储设备。计算机可读介质可以包括非暂时性计算机可读介质,例如,诸如在短时间段内存储数据的计算机可读介质,像寄存器存储器、处理器高速缓存和随机存取存储器(ram)。计算机可读介质还可以包括非暂时性介质,诸如次级或持久长期存储装置,例如像只读存储器(rom)、光盘或磁盘、压缩盘只读存储器(cd-rom)。计算机可读介质还可以是任何其他易失性或非易失性存储系统。计算机可读介质可以被认为是例如计算机可读存储介质或有形存储设备。
86.另外,对于方法500和本文公开的其他过程和方法,图5中的每个框可以表示被连线以执行过程中的特定逻辑功能的电路。
87.在框502处,方法500涉及由lidar设备的光发射器将第一光脉冲发射到视场中。在一些示例中,光发射器能够是lidar设备的唯一光发射器。在其他示例中,光发射器能够是lidar设备的多个光发射器之一,其中,每个光发射器被配置为将光脉冲发射到各个视场中。在一些这样的示例中,lidar设备可以包括一个或更多个主光发射器(例如,主光发射器102或主光发射器208、210)和一个或更多个次光发射器(例如,次光发射器104或次光发射器212)。在这样的示例中,发射第一光脉冲的光发射器可以是主光发射器。视场能够是lidar设备的环境内的任何视场,诸如图2中所示的视场240或242之一或图3中所示的视场302-322之一。
88.在一些实施例中,lidar设备可以被配置为通过发射光脉冲并在连续测量时间段中检测反射光脉冲来确定到环境中的对象的距离。在这样的实施例中,第一光脉冲能够在连续测量时间段之一期间由光发射器发射。
89.在框504处,方法500涉及确定lidar设备的检测器在第一测量时间段期间检测到指示回射器或其他高反射对象的至少一个反射光脉冲,其中,检测器被配置为检测来自视场内的光。检测器能够是能够检测光的任何检测器,诸如图1中所示的检测器106或图2中描述的检测器218和220。
90.在一些实施例中,第一光脉冲在第一测量时间段期间由光发射器发射,并且由检测器检测到的至少一个反射光脉冲是第一光脉冲的反射。
91.在这样的实施例中,反射光脉冲能够基于反射光脉冲的形状指示回射器或其他高反射对象的反射。例如,来自回射器的反射光脉冲可以强烈到使得其快速地使检测器饱和。结果,检测到的信号(例如,作为时间的函数的adc值)可以增加到大的峰值(例如,对应于检测器的饱和值的峰值),但是一旦检测器饱和并且不再能够检测到光子,则检测到的信号就会非常快速地下降。所得到的脉冲具有大的峰值,但也非常窄。因此,检测到的脉冲的各种
特征,诸如脉冲的峰值、脉冲的宽度和/或脉冲的下降沿的陡度,可以指示回射器或其他高反射对象的反射。
92.在一些实施例中,由检测器检测到的至少一个反射光脉冲能够是在第一测量时间段期间由lidar设备的次光发射器发射的次光脉冲的反射。
93.在这样的实施例中,lidar设备可以包括至少一个主光发射器和至少一个次光发射器,其中,至少一个主光发射器在标准测量时间段期间发射主光脉冲,并且至少一个次光发射器在专用测量时间段期间发射次光脉冲。由至少一个次光发射器发射的光脉冲可以在比由至少一个主光发射器发射的光脉冲宽的视场上展开,并且可以具有更低的强度。第一测量时间段能够是其中至少一个次光发射器发射光以映射出回射器的位置并且至少一个主光发射器不发射光的专用测量时间段。因此,第一光脉冲可以在第一测量时间段之前的标准测量时间段期间由主光发射器发射。在这样的实施例中,反射光脉冲能够基于反射光脉冲的量值超过预定阈值来指示回射器或其他高反射对象的反射。能够基于反射光脉冲的峰值、反射光脉冲的积分面积或基于一些其他测量来确定反射光脉冲的量值。
94.在一些实施例中,lidar设备可以包括多个次光发射器。例如,每个主光发射器可以与具有相同或相似视场的相应次光发射器配对(例如,通过将配对的第一光发射器和次光发射器放置成彼此紧密接近)。在每对中,主光发射器可以发射主光脉冲,并且次光发射器可以以较低强度(在发射主光脉冲之前或之后)发射次光脉冲,以检测视场中的反射器。
95.在一些实施例中,由检测器检测到的至少一个反射光脉冲能够是由检测器检测到的两个反射光脉冲:由光发射器发射的第一光脉冲的反射和由次光发射器发射的次光脉冲的反射。
96.在这样的实施例中,lidar设备可以包括至少一个主光发射器和至少一个次光发射器,并且两种类型的光发射器可以在每个测量时间段期间发射光脉冲。因此,第一光脉冲可以在第一测量时间段期间由主光发射器发射,并且次光脉冲可以在第一测量时间段期间由次光发射器发射。第一光脉冲和次光脉冲可以在不同的时间发射(例如,次光脉冲可以在第一光脉冲之后发射),并且两个光脉冲可以在时间上分开预定时间差(例如,50纳秒)。两个光脉冲也可以具有不同的强度和光束宽度,其中,次光脉冲在更宽的视场上展开并且具有比第一光脉冲低的强度。
97.预定时间差可以是对于每个测量时间段相同的固定时间差。可替代地,预定时间差能够从一个测量时间段到另一个测量时间段变化。另外,在lidar设备包括多个主光发射器的实施例中,预定时间差对于所有主光发射器能够是相同的。可替代地,每个主光发射器能够具有不同的在主光发射器发射主光脉冲的时间与次光脉冲被发射的时间之间的预定时间差。
98.由主光发射器发射的第一光脉冲与由次光发射器发射的次光脉冲之间的时间差可以用于确定由检测器检测到的反射光脉冲指示由回射器或其他高反射对象的反射。例如,检测器可以在第一时间检测第一反射光脉冲并且在第二时间检测第二反射光脉冲。由检测器检测到的这两个反射光脉冲指示由回射器或其他高反射对象的反射的确定可以基于确定第一时间和第二时间之间的时间差对应于由主光发射器发射第一光脉冲的时间与由次光发射器发射次光脉冲的时间之间的预定时间差。
99.确定由检测器检测到的反射光脉冲指示回射器或其他高反射对象的反射也能够
基于多次拍摄。例如,能够改变发射光脉冲之间的定时以解决检测回射器时的模糊性。
100.确定由检测器检测到的第一反射光脉冲和第二反射光脉冲指示由回射器或其他高反射对象的反射也可以考虑第一反射光脉冲和第二反射光脉冲的其他特征。在一些实现方式中,确定可以涉及检查第一反射脉冲和第二反射脉冲的峰值是否与由主光发射器发射的第一光脉冲和由次光发射器发射的次光脉冲一致。例如,如果第一光脉冲在次光脉冲之前发射,则检测到的第一反射光脉冲应当具有比检测到的第二反射光脉冲高的峰值。在一些实现方式中,确定可以涉及确定反射光脉冲之一是否具有指示由回射器反射的形状(例如,高峰值与窄脉冲宽度和陡峭下降沿的组合)。在一些实现方式中,该确定可以涉及确定第一反射光脉冲和/或第二反射光脉冲具有超过预定阈值的量值。例如,能够将第一反射光脉冲的峰值与指示第一光脉冲由回射器反射的第一阈值进行比较,和/或能够将第二反射光脉冲的峰值与指示次光脉冲由回射器反射的第二不同阈值进行比较。
101.在该方法的变型中,主光发射器能够发射在时间上分开预定时间段的第一光脉冲和次光脉冲(以较低强度)两者。因此,能够控制由主光脉冲发射的光脉冲的强度,而不是使用单独的次光发射器。
102.在框506处,方法500涉及响应于检测到指示回射器或其他高反射对象的反射的至少一个反射光脉冲,在一个或更多个后续测量时间段期间停用光发射器。所述一个或更多个后续测量时间段发生在第一测量时间段之后。在一些实施例中,在一个或更多个后续测量时间段期间停用光发射器涉及控制光发射器,使得光发射器在一个或更多个后续测量时间段期间不发射光(例如,不照射回射器)。可替代地,在一个或更多个后续测量时间段期间停用光发射器能够涉及控制光发射器,使得光发射器在一个或更多个后续测量时间段期间以降低的水平发射光(例如,具有降低的脉冲能量和/或强度的光脉冲)。有利地,即使光发射器仍然可以朝向回射器发射一些光,降低的光发射水平也能够足够低,使得串扰大大减少或消除。
103.在一些实施例中,方法500还涉及确定何时重新激活停用的光发射器。此外,确定何时重新激活停用的光发射器可以涉及确定光发射器的对应检测器在一个或更多个后续测量时间段期间是否检测到指示回射器或其他高反射对象的反射的一个或更多个附加反射光脉冲。在这方面,即使光发射器在一个或更多个后续测量时间段期间被停用,光发射器的对应检测器仍然可以出于至少两个可能的原因检测到反射光脉冲。
104.首先,在lidar设备包括多个主光发射器(包括停用的光发射器)的实施例中,来自其他主光发射器中的一个或更多个的杂散光可以进入停用的光发射器的视场并到达回射器。因此,被配置为检测来自停用的光发射器的视场内的光的检测器可以检测到对应于来自一个或更多个其他主光发射器的杂散光的反射光脉冲,该杂散光由回射器或其他高反射对象反射。
105.其次,在lidar设备包括次光发射器的实施例中,次光发射器可以继续将光脉冲发射到包括停用的光发射器的视场的宽视场中。因此,检测器可以检测到对应于来自次光发射器的由回射器或其他高反射对象反射的光的反射光脉冲。
106.因此,作为杂散光由回射器反射的结果和/或作为来自次光发射器的光由回射器反射的结果,检测器可以在第一测量时间段之后发生的第二测量时间段期间检测到一个或更多个附加的反射光脉冲。第二测量时间段可以在第一测量时间段之后立即发生,或者可
以在第一测量时间段之后的某个数量的测量时间段发生。可以分析一个或更多个附加反射光脉冲以确定附加反射光脉冲是否指示回射器的反射。
107.在一些实施例中,该分析可以涉及将附加反射光脉冲的量值(例如,附加反射光脉冲的峰值或积分面积)与阈值进行比较。如果量值超过阈值,则附加反射光脉冲可以被认为是停用的光发射器的视场中的回射器或其他高反射对象的反射的结果。如果量值未超过阈值,则附加反射光脉冲可以被认为是尚未由回射器或其他高反射对象反射噪声或杂散光的结果,从而指示回射器或其他高反射对象不再处于停用的光发射器的视场中。
108.在一些实施例中(例如,在主光发射器和次光发射器发射在时间上分开预定时间差的光脉冲的实施例中),该分析可以涉及确定是否检测到具有与预定时间差对应的时间差的两个附加反射光脉冲。例如,反射光脉冲之一可以由来自由一个或更多个其他主光发射器发射的光脉冲的杂散光由回射器反射而产生,并且另一个反射光脉冲可以通过由次光发射器发射的光由回射器或其他高反射对象反射而产生。如果检测到具有与预定时间差相对应的时间差的两个附加反射光脉冲,则附加反射光脉冲可以被认为是由停用的光发射器的视场中的回射器或其他高反射对象反射的结果。没有检测到这样的附加反射光脉冲可以指示回射器或其他高反射对象不再处于停用的光发射器的视场中。
109.如果分析指示在第二测量时间段期间由检测器检测到的一个或更多个附加反射光脉冲指示回射器或其他高反射对象的反射,则光发射器可以在一个或更多个附加测量时间段内继续被停用。然而,如果分析指示附加反射光脉冲不指示回射器或其他高反射对象的反射,则可以重新激活光发射器,使得光发射器在第二测量时间段之后发生的第三测量时间段中发射第二光脉冲。
110.图6a-6c示出了lidar设备扫描其环境的一部分的示例场景600。lidar设备包括具有跨越仰角范围和方位角范围的视场的多个透射/接收通道。出于说明的目的,图6a-6c将透射/接收通道的视场示出为包括五个不同方位角和七个不同仰角的网格图案。每个单独的透射/接收通道的视场由圆圈指示。然而,在实践中,透射/接收通道的视场可以呈现某种其他形状。另外,虽然图6a-6c示出了网格图案中的视场,但是应当理解,透射/接收通道的视场可以不同地排列。在场景600中,可以使用任何前述技术来确定何时由于回射器存在于光发射器的视场中而停用光发射器,以及何时由于回射器不再存在于光发射器的视场中而重新激活光发射器。
111.如图6a所示,如当lidar设备扫描其环境的一部分时会发生的,通道的视场的网格图案在方向604上朝向回射器602移动。回射器602能够是例如道路标志(例如,人行横道标志)、载具上的回射标记或一些其他类型的回射器。方向604可以是基于例如lidar设备围绕垂直轴旋转的水平方向(例如,平行于地面或路面)。
112.在图6a所示的时间点,回射器602的一部分刚刚移动到通道606的视场中,但尚未在任何其他通道的视场中。通道606的光发射器朝向回射器602发射光脉冲,其产生由通道606的检测器检测的强反射光脉冲。另外,一个或更多个相邻通道(诸如通道608、610和/或612)可以检测由来自强反射光脉冲的杂散光进入那些通道的视场而产生的弱反射光脉冲。如果用于距离确定,则这些弱反射光脉冲会导致不准确。因此,期望检测回射器602的存在并控制在各种透射/接收通道中发射的光以避免照射回射器602。
113.在场景600中,可以使用本文描述的任何技术(例如,在有或没有次光发射器的帮
助下)来确定由通道606中的检测器检测到的强反射光脉冲指示606的视场中的回射器的反射。响应于该确定,通道606中的光发射器被停用。
114.图6b示出了当回射器602处于通道606的视场中并且也处于七个其他通道的视场中时的稍后时间点。可以使用本文描述的任何技术来检测这些通道的视场中回射器602的存在,并且响应地停用这些通道中的光发射器。在图6b中,具有停用的光发射器的通道由阴影线指示。
115.图6c示出了当回射器602不再处于通道606的视场中时的更晚的时间点。通道606中的光发射器已经被重新激活,如由没有阴影线示出的通道606所指示的。在场景600中,响应于确定回射器602不再处于通道606的视场中,重新激活通道606中的光发射器。能够使用本文描述的任何技术来进行该确定。然而,回射器602在其他通道的视场中。如阴影所示,这些通道中的光发射器已被停用。
116.图7a-7d是示出场景700的时序图,其中,在lidar设备的光发射器的视场中检测到回射器,响应性地停用光发射器,并且随后当回射器不再在光发射器的视场中时重新激活光发射器。在场景700中,lidar设备包括多个透射/接收通道,每个透射/接收通道具有各自的视场,各个光发射器向该视场中发射光脉冲,并且对应的检测器被配置为从该视场检测光。出于说明的目的,在场景700中描述了三个透射/接收通道(ch1、ch2和ch3)。此外,场景700是在不使用泛光照明器、闪光照明器或其他类型的次光发射器的情况下检测回射器的示例。
117.图7a示出了测量时间段t1,其包括发射时间段,随后是检测时间段。ch1、ch2和ch3中的光发射器在发射时间段期间发射光脉冲702、704和706。在这种场景下,光脉冲702-706同时或几乎同时发射。可替代地,光脉冲702-706能够在发射时间段内的不同时间发射。
118.ch1中的检测器检测反射光脉冲708和710。ch2中的检测器检测反射光脉冲712。ch3中的检测器检测反射光脉冲714。分析反射光脉冲708-714的形状以确定这些反射光脉冲中的任何一个是否指示回射器的反射。在该示例中,反射光脉冲712基于其形状,具体地基于反射光脉冲窄且具有大的峰值指示回射器的反射。因此,反射光脉冲712的形状指示回射器在ch2的视场中。
119.其他反射脉冲的形状不指示回射器的反射,因此可以用于确定到对象的距离。然而,因为反射光脉冲708是与回射光脉冲712同时检测到的弱脉冲,所以反射光脉冲708是否实际上表示ch1的视场中的对象的反射,或者反射光脉冲708是否表示来自回射器的杂散光会是模糊的,该回射器实际上在ch2而不是ch1的视场中。
120.基于反射光脉冲712的形状指示ch2的视场中的回射器,ch2的光发射器在一个或更多个后续测量时间段内被停用。例如,图7b示出了后续测量时间段t2。如图所示,ch1和ch3中的光发射器发射光脉冲720和722,但是ch2中的光发射器不发射光。ch1中的检测器检测反射光脉冲724(其可以类似于反射光脉冲710),并且ch3中的检测器检测反射光脉冲726(其可以类似于反射光脉冲714)。即使ch2中的光发射器不发射光,ch2中的检测器也检测反射光脉冲728(例如,反射光脉冲728的量值超过阈值)。反射光脉冲728的检测指示回射器仍然在ch2的视场内。具体地,反射光脉冲728出现是因为来自ch1和/或ch3的杂散光到达回射器并被反射到ch2的视场中。
121.图7b还示出了检测器ch1不再检测到像模糊反射光脉冲708那样的反射光脉冲。因
此,在该示例中,停用ch2中的光发射器使得光发射器不照射回射器有效地防止ch1检测到伪反射光脉冲。
122.基于ch2的检测器在ch2的光发射器被停用时检测到反射光脉冲,这指示回射器仍然在回射器的视场内,ch2的光发射器可以在一个或更多个后续测量时间段内保持停用。然而,在某一时刻,回射器可能不再在ch2的视场内(例如,因为lidar设备已经扫描经过它)。在场景700中,这发生在测量时间段t3期间,如图7c所示。
123.如图7c所示,ch1中的光发射器发射光脉冲730,ch3中的光发射器发射光脉冲732,但ch2中的发射器不发射光。ch1中的检测器检测反射光脉冲734(其可以类似于反射光脉冲724),并且ch3中的检测器检测反射光脉冲736(其可以类似于反射光脉冲726)。然而,ch2中的检测器未检测到反射光脉冲(例如,未检测到超过阈值的反射光脉冲)。这指示回射器不再处于ch2的视场中。
124.基于ch2中的检测器在测量时间段t3期间未检测到反射光脉冲,ch2的光发射器被重新激活以在一个或更多个后续测量时间段期间发射光。图7d示出了后续测量时间段t4。如图所示,ch1、ch2和ch3中的光发射器分别发射光脉冲740、742和744,并且ch1、ch2和ch3中的检测器检测反射光脉冲746、748和750。在这种情况下,反射光脉冲746、748和750不指示回射器的反射,并且因而可用于确定到对象的距离。
125.图8a-8d是示出场景800的时序图,其中,在lidar设备的光发射器的视场中检测到回射器,响应性地停用光发射器,并且随后当回射器不再处于光发射器的视场中时重新激活光发射器。场景800类似于场景700,除了使用次光发射器。因此,在场景800中,lidar设备包括多个透射/接收通道,每个透射/接收通道具有各自的视场,各个主光发射器向该视场中发射光主要脉冲,并且对应的检测器被配置为从该视场检测光。出于说明的目的,描述了三个透射/接收通道(ch1、ch2和ch3)。在场景800中,次光发射器还将次光脉冲发射到涵盖透射/接收通道的视场的宽视场中。次光脉冲具有比主光脉冲低得多的强度。结果,次光脉冲的反射不预期被检测为反射光脉冲(例如,检测到高于阈值),除非它们由回射器反射。
126.图8a示出了测量时间段t1,其包括发射时间段,随后是检测时间段。ch1、ch2和ch3中的主光发射器在发射时间段期间分别发射主光脉冲802、804和806。次光发射器在发射时间段期间发射次光脉冲808。因为次光脉冲808照射每个通道的视场,所以次光脉冲808在ch1、ch2和ch3中示出。在该示例中,同时或几乎同时发射主光脉冲802-806,并且在发射主光脉冲802-806之后的预定时间段(例如,50纳秒)发射次光脉冲808。可替代地,可以在发射主光脉冲802-806之前发射次光脉冲808,或者在发射主光脉冲802-806的同时发射次光脉冲808。
127.ch1中的检测器检测反射光脉冲810和812。ch2中的检测器检测反射光脉冲814和816。ch3中的检测器检测反射光脉冲818。然后分析反射光脉冲810-818以确定反射光脉冲中的任何一个是否指示回射器的反射。该分析能够涉及确定两个反射光脉冲是否以对应于主光脉冲802-806和次光脉冲808的发射之间的预定时间段的时间间隔出现在同一通道中。在这种情况下,ch2中的反射光脉冲814和816具有这样的时间间隔。因此,反射光脉冲814和816指示ch2的视场中的回射器的反射。该分析还能够考虑其他因素,诸如反射光脉冲的形状。在这种情况下,反射光脉冲814具有大的峰值和窄的宽度,这进一步指示在ch2的视场中的回射器的反射。
128.其他反射光脉冲810、812和818可以用于确定到对象的距离。然而,因为反射光脉冲810是在检测回射光脉冲814的同时检测到的弱脉冲,所以反射光脉冲810会是由于ch2的视场中的回射器而不是由ch1的视场中的对象反射引起的串扰。
129.基于确定反射光脉冲814和816指示ch2的视场中的回射器的反射,在一个或更多个后续测量时间段内停用ch2的主光发射器。例如,图8b示出了后续测量时间段t2。在发射时间段期间,ch1和ch3中的主光发射器发射主光脉冲820和822,但是ch2中的主光发射器不发射光。在发射时间段期间,次光发射器将次光脉冲824发射到涵盖ch1、ch2和ch3的视场的宽视场中。在检测时间段期间,ch1中的检测器检测反射光脉冲824(其可以类似于反射光脉冲812),ch2中的检测器检测弱反射光脉冲828和830,并且ch3中的检测器检测反射光脉冲832(其可以类似于反射光脉冲818)。
130.分析反射光脉冲826-832以确定是否指示回射器的反射。如前所述,分析能够涉及确定两个反射光脉冲是否以对应于主光脉冲820、822和次光脉冲824的发射之间的预定时间段的时间间隔出现在同一通道中。在这种情况下,ch2中的反射光脉冲828和830具有这样的时间间隔。该分析还可以考虑其他考虑因素,诸如一个或两个脉冲是否具有超过阈值的量值。
131.因此,在该示例中,反射光脉冲828和830指示ch2的视场内的回射器的反射。反射光脉冲828可以归因于来自在其他通道中发射的主光脉冲的杂散光被回射器反射到ch2的视场中。反射光脉冲830可以归因于次光脉冲824被回射器反射。
132.基于确定反射器仍然在ch2的视场内,ch2的主光发射器可以在一个或更多个后续测量时间段内保持停用。然而,在某一时刻,回射器可能不再处于ch2的视场内(例如,因为lidar设备已经扫描经过它)。在场景800中,这在测量时间段t3期间发生,如图8c所示。
133.如图8c所示,ch1中的主光发射器发射主光脉冲740,ch3中的主光发射器发射主光脉冲842,但ch2中的主发射器不发射光。次光发射器将次光脉冲844发射到涵盖ch1、ch2和ch3的视场的宽视场中。在检测时间段期间,ch1中的检测器检测反射光脉冲846(其可以类似于反射光脉冲826),并且ch3中的检测器检测反射光脉冲848(其可以类似于反射光脉冲848)。然而,ch2中的检测器未检测到反射光脉冲(例如,未检测到超过阈值的反射光脉冲)。这指示回射器不再处于ch2的视场中。
134.基于ch2中的检测器在测量时间段t3期间未检测到反射光脉冲,ch2的光发射器被重新激活以在一个或更多个后续测量时间段期间发射光。图8d示出了后续测量时间段t4。如图所示,ch1、ch2和ch3中的主光发射器分别发射主光脉冲850、852和854,并且次光发射器发射次光脉冲856。ch1、ch2和ch3中的检测器检测反射光脉冲858、860和862。在这种情况下,反射光脉冲858、860和862不指示回射器的反射,因此可以用于确定到对象的距离。
135.在上述场景800中,次光发射器在每个测量时间段中发射次光脉冲,以便检测回射器。然而,在其他实现方式中,次光发射器可以仅在某些测量时间段中发射次光脉冲。例如,次光发射器可以仅在主光发射器不发射光的专用测量时间段期间发射次光脉冲。专用测量时间段可以与其中主光发射器发射主光脉冲的标准测量时间段交错。例如,专用测量时间段可以每五个测量时间段、每十个测量时间段、每二十个测量时间段或以某个其他频率发生。可替代地,可以动态地指定专用测量时间段,例如,响应于传感器数据或表明lidar设备可以扫描回射器的其他信息。在又一个方法中,专用测量时间段能够是用于确定环境光的
背景水平的背景测量时间段。例如,背景测量时间段可以在每个测量时间段的发射时间段之前发生,使得在背景测量时间段期间确定的背景水平可以用于设置在后续测量时间段期间使用的检测阈值。因此,除了测量环境光的背景水平之外,可以使用背景测量时间段来检测可以指示回射器或其他高反射对象的反射的次光脉冲的反射。
136.可以使用专用测量时间段来确定回射器何时在通道的视场内,使得可以响应地停用该通道中的主光发射器。还可以使用专用测量时间段来确定回射器何时不再处于通道的视场内,使得可以响应地重新激活该通道中的主光发射器。图9a-9d是示出场景900的时序图,其中,专用测量时间段用于确定何时停用以及何时重新激活主光发射器。
137.图9a示出了测量时间段t1,其是用于检测回射器是否在任何通道(ch1、ch2和ch3)的视场内的专用测量时间段。次光发射器将次光脉冲902发射到涵盖ch1、ch2和ch3的视场的宽视场中。次光脉冲902的强度足够低,使得次光脉冲902的反射仅在由回射器反射时才是可检测的(例如,检测到高于阈值)。在这种情况下,ch1中的检测器检测反射光脉冲904,ch2中的检测器检测反射光脉冲906,并且ch3中的检测器不检测反射光脉冲。这些检测指示回射器存在于ch1和ch2的视场中,但不存在于视场ch3中。作为响应,ch1和ch2中的主光发射器在一个或更多个后续测量时间段内被停用。
138.图9b示出了作为标准测量时间段的后续测量时间段t2。ch3中的主光发射器发射主光脉冲910,并且ch3中的检测器检测反射光脉冲912。反射光脉冲912可以用于确定到对象的距离。ch1和ch2中的主光发射器被停用,并且ch1和ch2中的检测器不检测任何反射光脉冲。
139.后续专用测量时间段可以用于确定是否重新激活ch1中的主光发射器和/或ch2中的主光发射器。图9c示出了后续专用测量时间段t3。如图所示,次光发射器将次光脉冲920发射到涵盖ch1、ch2和ch3的宽视场中。次光脉冲920的强度足够低,使得次光脉冲920的反射仅在由回射器反射时才是可检测的(例如,检测到高于阈值)。在这种情况下,ch1中的检测器检测反射光脉冲922,但是ch2和ch3中的检测器不检测任何反射光脉冲。这些检测指示回射器仍然存在于ch1的视场中,回射器不再处于视场ch2中,并且回射器不在ch3的视场中。作为响应,在一个或更多个后续测量时间段内停用ch1中的主光发射器,并且在一个或更多个后续测量时间段内重新激活ch2中的主光发射器。
140.图9d示出了后续标准测量时间段t4。如图所示,ch2中的主光发射器发射主光脉冲930,并且ch3中的主光发射器发射主光脉冲932。ch1中的主光发射器被停用,并且ch1中的检测器不检测反射光脉冲。ch2和ch3中的检测器分别检测反射光脉冲934和936,其可以用于确定到对象的距离。
141.iv.lidar设备之间的示例信息共享
142.如上所述,lidar设备可以在特定测量时间段期间检测到回射器(或其他高反射对象)在lidar设备的特定光发射器的视场内,并且可以响应地停用特定光发射器。在一些实现方式中,lidar设备还可以被配置为与一个或更多个其他系统(例如,一个或更多个其他lidar设备)共享关于检测到的回射器的信息。当具有重叠视场的多个lidar设备耦接到载具时,这种信息共享能够是特别有益的,诸如图4a-4e所示。例如,当载具上的第一lidar设备检测到也在载具上的第二lidar设备的视场内的回射器时,可以与第二lidar设备共享关于检测到的回射器的信息,使得第二lidar设备能够停用光发射器或采取其他动作以避免
照射回射器。信息共享可以经由载具上的计算设备(例如,以自动或半自动操作模式控制载具的计算设备)发生。
143.图10示出了用于在耦接到载具的lidar设备之间共享信息(例如,关于检测到的回射器的信息)的示例系统1000。在该示例中,系统1000包括lidar设备1010、1020、1030、1040和1050,并且还包括通信地耦接到每个lidar设备的计算设备。例如,如图4a-4e所示,lidar设备1010-1050能够耦接到载具。因此,lidar设备1010能够耦接到载具的顶部(例如,如传感器系统402),并且lidar设备1020-1050能够耦接到载具的前侧、后侧、右侧和左侧(例如,如传感器系统404-410)。计算设备1060也能够耦接到载具。例如,计算设备1060可以被配置为以自主模式控制载具,诸如控制载具的速度、加速度、方向或其他驾驶行为。
144.系统1000可以被配置为支持关于回射器的单向或双向信息共享。对于单向信息共享,lidar设备之一(例如,lidar设备1010)可以是被配置为检测回射器并将关于检测到的回射器的信息发送到计算设备1060的“源”lidar设备,而其他lidar设备(例如,lidar设备1020-1050)可以是被配置为从计算设备1060接收关于检测到的回射器的信息的“接收方”lidar设备。例如,源lidar设备1010可以检测回射器(例如,使用本文描述的任何技术),并且可以响应地将指示检测到的回射器的位置的信息发送到计算设备1060。基于该信息,计算设备1060可以将接收方lidar设备1020-1050中的一个或更多个识别为具有包括检测到的回射器的视场,并且可以向一个或更多个接收方lidar设备中的每一个发送关于检测到的回射器的消息。响应于接收到该消息,一个或更多个接收方lidar设备中的每一个可以停用光发射器或采取其他动作以避免照射检测到的回射器。
145.当源lidar设备具有宽视场(例如,围绕载具360度)并且接收方lidar设备均具有与源lidar设备的视场至少部分重叠的较窄视场时,这种单向信息共享能够特别有用。源lidar设备通常能够被配置为检测对象,或者源lidar设备能够专用于仅检测回射器。
146.在一些实现方式中,系统1000可以支持关于回射器的双向信息共享。在这样的实现方式中,回射器可以由lidar设备1010-1050中的任何一个检测,并且计算设备1060可以将关于检测到的回射器的信息发送到在其视场中具有检测到的回射器的任何其他lidar设备。
147.图11是示出用于共享关于检测到的回射器的信息的示例方法1100的流程图。出于说明的目的,将参考图10中所示的系统1000来描述方法1100。然而,应当理解,能够使用其他配置。
148.如框1110所示,方法1100涉及由计算设备(例如,计算设备1060)从耦接到载具的第一lidar设备(例如,lidar设备1010)接收数据,其中,该数据包括指示由第一lidar设备检测到的回射器的位置的信息。在一些情况下,数据能够包括指示由第一lidar设备检测到的多个回射器的位置的信息。数据还可以包括其他信息。
149.第一lidar设备可以使用本文描述的任何技术来检测回射器。指示检测到的回射器的位置的信息可以包括关于回射器的位置的任何信息。例如,该信息可以指示在特定时间段(例如,检测到回射器的特定测量时间段)期间回射器在第一lidar设备中的多个光发射器中的特定光发射器的视场内。基于该信息,计算装置可以确定回射器所位于的方向。指示检测到的回射器的位置的信息还可以指示到回射器的距离(例如,基于发射光脉冲被发射的时间与来自回射器的反射光脉冲被检测到的时间之间的时间差)。其他类型的位置信
息也是可行的。
150.如框1110所示,方法1100还涉及由计算设备确定回射器的位置在耦接到载具的第二lidar设备的视场内。如框1120所示,方法1100还涉及由计算设备向第二lidar设备发送消息,其中,该消息包括指示回射器在第二lidar设备的视场内的信息。在一些情况下,消息可以包括指示多个回射器在第二lidar设备的视场内的信息(例如,当来自第一lidar设备的数据包括多个回射器的位置时)。
151.在一个可能的实现方式中,计算设备可以将回射器的位置映射到载具的世界坐标系中的位置。耦接到载具的每个lidar设备的视场也能够映射到载具的世界坐标系。然后,计算设备能够识别在世界坐标系中具有包括世界坐标系中的回射器的位置的视场的任何lidar设备(除了检测到回射器的lidar设备之外)。以这种方式,计算设备能够确定回射器的位置在耦接到载具的第二lidar设备的视场内,并向第二lidar设备发送关于回射器的消息。在一些情况下,计算设备可以确定回射器的位置在耦接到载具的多个lidar设备的视场内。在这种情况下,计算设备可以向多个lidar设备中的每一个发送关于回射器的消息。
152.消息中包括的指示回射器在第二lidar设备的视场内的信息能够是使第二lidar设备能够识别回射器在其视场内的任何信息。在示例实施例中,第二lidar设备可以响应地避免照射回射器。例如,响应于接收到消息,第二lidar可以停用第二lidar设备中的光发射器,以避免照射回射器。
153.在一些实现方式中,指示回射器在第二lidar设备的视场内的信息可以指定回射器的位置。例如,该信息能够包括回射器相对于第二lidar设备的相对位置。相对位置能够由计算设备从载具的世界坐标系中的位置映射到第二lidar设备的坐标系或参考系中的位置。能够提供回射器的相对位置,例如,为第二lidar设备的偏航角和第二lidar设备的俯仰角。然而,指定回射器的位置的其他方式也是可行的。
154.指示回射器在第二lidar设备的视场内的信息还能够包括关于回射器的其他信息,诸如回射器是移动的还是静态的。
155.方法1100还能够包括当检测器回射器不再存在于该位置时通知第二lidar设备的步骤。例如,当第一lidar设备响应于检测到的回射器重新激活先前停用的光发射器时,第一lidar设备能够通知计算设备,并且计算设备能够向第二lidar设备发送第二消息,以指示在先前在第一消息中指示的位置处不再存在回射器。然而,第二消息能够指示回射器仍然在第二lidar设备的视场内但处于不同的相对位置。相对位置的变化能够是载具的运动和/或回射对象的运动的结果。
156.v.结论
157.图中所示的特定排列不应被视为限制。应当理解,其他实现方式可以包括更多或更少的给定图中所示的每个元件。此外,可以组合或省略一些所示元件。此外,示例性实现方式可以包括图中未示出的元件。另外,虽然本文已经公开了各种方面和实现方式,但是其他方面和实现方式对于本领域技术人员而言将是清楚的。本文公开的各个方面和实现方式是为了说明的目的,而不是限制性的,真实的范围和精神由所附权利要求指示。在不脱离本文呈现的主题的精神或范围的情况下,可以利用其他实现方式,并且可以进行其他改变。将容易理解的是,如本文一般描述的并且在附图中示出的本公开的各方面能够以各种不同的配置来排列、替换、组合、分离和设计。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。