新的星载gnss反射信号的溢油检测方法
技术领域
1.本发明涉及海上溢油检测领域,具体涉及一种新的星载gnss反射信号的溢油检测方法。
背景技术:
2.海上溢油是海洋污染的主要原因之一,造成海上溢油的原因有海上石油开采平台的泄露和船舶在海上运输过程中发生泄漏等。目前主要的海面溢油检测方法有:合成孔径雷达(synthetic aperture radar,sar)、高光谱等。
3.gnss-r作为一种新型的海面监测方法,主要基本技术特点是利用反射的导航卫星伪随机测距码信号或者载波信号,提取目标反射面特征,其工作模式为收发分置的双基雷达模式。与其他溢油检测技术相比,具有大量信号源、全天候和全天时、采用异源观测模式、节约终端、精准的时空间信息等特点。目前gnss-r在溢油检测方面主要是使用介电常数监测溢油,该方法适合于地基gnss-r接收机的小范围溢油探测。
技术实现要素:
4.本发明的目的在于提供一种新的星载gnss反射信号的溢油检测方法,结合镜面反射点σ0值、ddm的波形峰值以及风速,实现星载gnss-r反射信号的海面溢油检测。
5.为了达到上述的目的,本发明提供一种新的星载gnss反射信号的溢油检测方法,利用星载实测数据的时延-多普勒延迟图ddm的波形峰值和归一化双基地散射截面σ0,并结合海面风速,实现溢油检测。
6.上述新的星载gnss反射信号的溢油检测方法,其中,包括:(1)获取星载gnss-r探测载荷数据;
7.(2)根据星载gnss-r探测载荷数据计算ddm的波形峰值和σ0;
8.(3)获取海面风速;
9.(4)结合ddm的波形峰值、σ0值和海面风速进行溢油监控。
10.上述新的星载gnss反射信号的溢油检测方法,其中,在2.5m/s<海面风速<5.0m/s条件下,同一颗gnss卫星数据中某镜面反射点的ddm的波形峰值大于其它镜面反射点ddm的波形峰值的10%,且该镜面反射点的σ0值亦大于其它镜面反射点σ0值的10%,判定该镜面反射点附近区域为溢油区域。
11.上述新的星载gnss反射信号的溢油检测方法,其中,所述步骤(1)中,接收星载gnss反射信号即能获得星载gnss-r探测载荷数据。
12.上述新的星载gnss反射信号的溢油检测方法,其中,所述步骤(2)包括:(2-1)从星载gnss-r探测载荷数据中提取ddm可观测值以及经纬度; (2-2)对提取的信息进行预处理;(2-3)根据预处理后的数据计算ddm的波形峰值和σ0值。
13.与现有技术相比,本发明的有益技术效果是:
14.本发明的新的星载gnss反射信号的溢油检测方法,结合镜面反射点σ0值、ddm的波
形峰值以及风速,实现了星载gnss-r反射信号的海面溢油检测;
15.本发明的新的星载gnss反射信号的溢油检测方法,利用星载gnss-r 具有较大的反射截面的特点,可大大提高溢油探测范围。
附图说明
16.本发明的新的星载gnss反射信号的溢油检测方法由以下的实施例及附图给出。
17.图1为溢油前后gnss反射信号的ddm对比图,其中,(a)为溢油后 gnss反射信号的ddm图,(b)为海水gnss反射信号的ddm图。
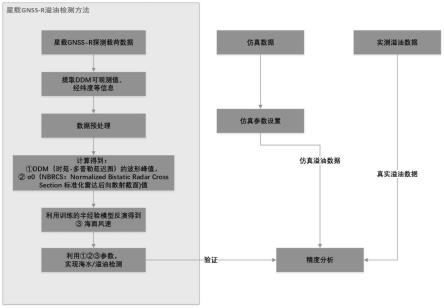
18.图2为本发明新的星载gnss反射信号的溢油检测方法的流程图。
19.图3-1为海面风速与σ0值的关系图。
20.图3-2为海面风速与ddm的波形峰值的关系图。
21.图4为溢油点附近镜面反射点示意图(2021年4月30日cygnss的6 号卫星)。
22.图5-1为56-69号镜面反射点与σ0值的关系图(风速》2.5m/s)。
23.图5-2为56-69号镜面反射点与ddm的波形峰值的关系图(风速》2.5m/s)。
具体实施方式
24.以下将结合图1~图5-2对本发明的新的星载gnss反射信号的溢油检测方法作进一步的详细描述。
25.与现有gnss-r在溢油检测方面的方法(即使用介电常数监测溢油)相比,星载gnss-r具有较大的反射截面,可大大提高溢油探测范围。本发明的新的星载gnss反射信号的溢油检测方法,利用星载实测数据的ddm(时延-多普勒延迟图)的波形峰值和σ0(nbrcs:normalized bistatic radar crosssection标准化雷达后向散射截面)值,并结合海面风速,实现溢油检测,该方法可适用于星载gnss-r的溢油检测。
26.1)星载gnss-r溢油检测原理
27.gnss-r技术原理是使用gnss导航卫星的反射信号和直射信号对目标探测进行遥感测量,然后提取反射信号中携带的目标探测表面的特征信息,从而应用于对不同反射面的反演。
28.valery u.zavortny与akexander g.voronovich于2000年建立了z-v模型,基于双基雷达方程,采用基尔霍夫近似几何光学方法,建立了gnss海面散射信号的延迟-多普勒二维相关功率模型,对原表达式在形式和变量上作轻微修改,如公式(1)所示:
[0029][0030]
式中,是相干处理的散射信号功率(单位为瓦特),p
t
是gps卫星发射功率,为gps卫星天线增益,是cygnss接收机天线增益,是发射机到地面的距离,接收器到地面的距离,l
a1
和l
a2
分别是到地表和从地表的大气损失,是归一化双基地散射截面(nbrcs),λ是gps信号载波波长(19厘米),是gps信号在延时下的扩展函
数,gps信号的频率响应。
[0031]
公式(1)可以用每个时延多普勒中多个变量的有效值来简化,得到ddm 中单个时延多普勒的表达式,如公式(2)所示:
[0032][0033]
式中,是每个延迟多普勒维上的有效接收天线增益,和是每个延迟多普勒维上的有效距离,是每个延迟多普勒维上的有效表面散射面积。
[0034]
海面粗糙度的影响用归一化双基地散射截面(nbrcs)σ0描述。在 kirchhoff近似的几何光学极限中,nbrcs函数σ0用表达式(3)表示:
[0035][0036]
式中,q是发射机和接收机在反射面上固定位置的散射矢量,这个矢量也可以看作是平面坐标的函数,为菲涅尔反射系数,p
(-q
⊥
/qz)为海面坡度的概率密度函数。
[0037]
由公式(1)到公式(3)可以得出,不同的海面粗糙度会引起σ0值的变化,从而导致ddm的波形峰值的变化。溢油会导致海面张力变化,从而影响海面粗糙度的变化,这是本发明星载gnss-r的溢油检测的主要原理。
[0038]
图1所示为溢油(即污染)前后gnss反射信号的ddm对比图,其中,(a)为溢油后gnss反射信号的ddm图,(b)为海水(即溢油前)gnss 反射信号的ddm图。从图1中可以计算出,溢油时σ0=173.564、ddm的波形峰值=3.58*e-17
;海水时σ0=131.172、ddm的波形峰值=2.76*e-17
,溢油时σ0和ddm的波形峰值均明显大于海水时σ0和ddm的波形峰值。
[0039]
根据该原理,本发明利用星载gnss-r实测数据的ddm的波形峰值和σ0值,并结合海面风速实现了对镜面反射点附近的溢油检测。
[0040]
2)本发明新的星载gnss反射信号的溢油检测方法的概述
[0041]
影响海面因素很多,根据星载gnss-r反射截面大,信号弱、干扰大的特点,传统的地基的溢油检测方法不能够满足星载反演的要求,因此提出一种新的星载gnss反射信号的溢油检测方法。
[0042]
图2所示为本发明新的星载gnss反射信号的溢油检测方法的流程图。
[0043]
参见图2,本发明新的星载gnss反射信号的溢油检测方法包括:
[0044]
(1)获取星载gnss-r探测载荷数据;
[0045]
接收星载gnss反射信号即可获得星载gnss-r探测载荷数据;
[0046]
(2)根据星载gnss-r探测载荷数据计算ddm的波形峰值和σ0值;
[0047]
(2-1)从星载gnss-r探测载荷数据中提取ddm可观测值以及经纬度等信息;
[0048]
(2-2)对提取的信息进行预处理;
[0049]
(2-3)根据预处理后的数据计算ddm的波形峰值和σ0值;
[0050]
根据星载gnss-r探测载荷数据计算ddm的波形峰值和σ0值,已有成熟技术,本发明
对此不展开详细说明,本发明对计算方法亦不作限制;
[0051]
(3)获取海面风速;
[0052]
求取海面风速的方法有很多种,例如,利用训练的半经验模型反演得到海面风速,本发明对求取海面风速的方法不作限制;
[0053]
(4)结合ddm的波形峰值、σ0值和海面风速进行溢油监控;
[0054]
在2.5m/s<海面风速<5.0m/s条件下,同一颗gnss卫星数据中某镜面反射点的ddm的波形峰值大于其它镜面反射点ddm的波形峰值的10%,且该镜面反射点的σ0值亦大于其它镜面反射点σ0值的10%,可判定该镜面反射点附近区域为溢油区域。
[0055]
3)本发明新方法的验证
[0056]
(1)本发明新方法的仿真
[0057]
在本方法仿真结果验证过程中,p
(-q
⊥
/qz)是描述海面粗糙度的概率函数其表达式如下所示:
[0058][0059]
式中,和分别为海面坡度在x、y方向上的分布(基于ecxi 坐标系),为侧风方向的海面均方坡度(cross-wind mss),为逆风方向的海面均方坡度(upwindmss)。
[0060]
根据cox提出的mss模型,当海面发生溢油时会影响海面均方坡度。将 katzberg s j模型与cox提出的模型相结合,当海面无油时:
[0061][0062][0063]
当海面溢油时:
[0064][0065][0066]
式中,
[0067][0068]
u为海面风速(单位:米/秒),在海平面10米高度测量。
[0069]
北京时间2021年4月27日9时许,一货船与一油轮在某海域发生碰撞,事故导致油轮货舱受损,海面发现溢油。本次仿真实验是模拟2021年4月30 日该海域溢油环境。
[0070]
星载gnss-r探测载荷数据仿真是根据cygnss 4月30日6号接收卫星在溢油事故最近的镜面反射点为基础进行设置,表1为仿真程序的基本参数,表2为仿真程序的主要参数。
[0071]
表1星载数据仿真实验基本参数
[0072][0073]
表1为固定参数,表2根据不同的海面风速结合公式(5)、(6)计算出有、无油时的海面均方坡度,进而计算出有、无油时的σ0值和ddm的波形峰值,主要参数如下:
[0074]
表2星载数据仿真实验主要参数
[0075][0076]
使用以上参数做为程序的输入,仿真实验目的是模拟出不同海面风速情况下有、无油对ddm的波形峰值、σ0值的影响。
[0077]
图3-1是海面风速与σ0值的关系图,图3-2是海面风速与ddm的波形峰值的关系图。图中clear表示无油、oil表示有油,由图可知海面风速越大,σ0值及ddm的波形峰值越小,这是由于海面风速越大,海面的粗糙度就越大,反射面越粗糙电磁波的相干分量功率值逐渐变小。当海面风速大于2.5m/s时,两者差距比较明显。
[0078]
仿真结果表明,星载数据的ddm的波形峰值和σ0(nbrcs)值,结合海面风速,可以实
现对镜面反射点附近的溢油检测。
[0079]
(2)本发明新方法海面溢油检测的cygnss实测结果
[0080]
cygnss(cyclone global navigation satellite system)星座发射于2016 年12月,由八颗小卫星组成,以35
°
的倾角绕热带轨道运行。cygnss的设计目的是在飓风事件期间监测海洋表面风速。每颗cygnss卫星都带有两个向下的天线和一个全球导航卫星系统反射测量(gnss-r)接收器。
[0081]
对于上述溢油区域,选取2021年4月30日cygnss的6号卫星的实际接收数据进行分析,溢油事故附近镜面反射点(no56-69)如图4所示,粗点表示在溢油水域中的镜面反射点,可以看出64和65镜面反射点在溢油检测区域内。
[0082]
图5-1、图5-2分别是在海面风速大于2.5m/s的情况下,实际cygnss 镜面反射点σ0值和ddm的波形峰值的对应关系。由图可知溢油区域中的两个镜面反射点的σ0值和ddm的波形峰值明显大于其他镜面反射点的数值。该结果说明本方法可以利用在实际星载gnss-r数据的溢油检测。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
