1.本发明涉及人形体和关节构造。
背景技术:
2.为了实现与人类、动物接近的动作、姿势,在人形玩具(人形体)包括各种的关节、可动部。但是,在人形玩具设置与人类等的关节相同数量的关节等的情况需要许多构件,即使是精巧的人形玩具,关节等的数量也有限,而难以实现上述设置。因而,为了实现上述这样的动作、姿势,重要的是,由更少的关节、构件构成,并且扩大关节、与关节连结的部位的可动区域,从而实现自然的动作。在专利文献1中提出了一种人形体,其与髋关节连结的连结构件在打开位置和关闭位置之间转动,腿部与连结构件的前端连结。对于该人形体,能够实现腿打开和腿合拢的动作。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2009-34232号公报
技术实现要素:
6.发明要解决的问题
7.虽然连结构件能够在打开位置和关闭位置之间转动,但其动作方向是单向的。为了实现人类的四肢那样的自然的动作,期望的是能够在各方向上转动。另一方面,通过将髋关节与人类同样地设于腰部的内部,能够实现与该髋关节连结的自然的腿部,但其动作空间存在限制。也就是说,谋求在由于与腰部、裙子等其他构件之间的关系而被限制的空间内,使腿部更自由地转动。例如,即使将球形状的连结部应用于髋关节并将腿部以转动自如的方式连接,该连结构件自身的可动区域也会被人形体的腰部等限制,而难以实现将腿部上抬至将近180度等像人类那样的逼真的动作。
8.本发明提供例如在人形体实现更丰富多彩的姿势的结构。
9.用于解决问题的方案
10.本发明例如是一种人形体,其特征在于,该人形体包括:第1连结构件,其在一端具有球形状的连结部;第1零部件,其形成供所述球形状的连结部以能够转动的方式嵌入的凹部;以及第2零部件,其以能够旋转的方式连接于所述第1连结构件的另一端。
11.此外,本发明例如是一种人形体,其特征在于,该人形体包括:第1连结构件,其在一端具有球形状的连结部,在另一端具有把持部;第1零部件,其形成供所述球形状的连结部以能够转动的方式嵌入的凹部;以及第2零部件,其以能够旋转的方式连接于所述第1连结构件的所述把持部。
12.发明的效果
13.根据本发明,能够在人形体实现更丰富多彩的姿势。
附图说明
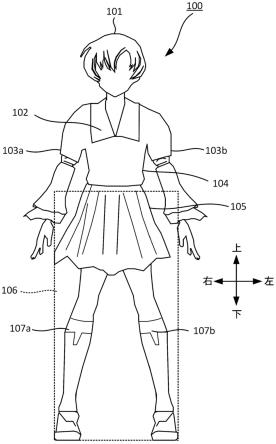
14.图1是表示一实施方式的人形体的外观正面的一例的图。
15.图2的(a)是一实施方式的人形体的下半身的主视图,图2的(b)是一实施方式的人形体的下半身的侧视图。
16.图3是一实施方式的人形体的下半身的分解图。
17.图4是一实施方式的人形体的腿部的侧剖视图。
18.图5是表示一实施方式的人形体的髋关节的动作的侧剖视图。
19.图6是表示一实施方式的人形体的膝关节的动作的侧剖视图。
20.图7是表示一实施方式的人形体的姿势的动作例的图。
21.附图标记说明
22.100、人形体;101、头部;102、胸部;103a、103b、臂部;104、腹部;105、腰部;106、下半身;107a、107b、腿部。
具体实施方式
23.以下,参照附图详细地说明实施方式。另外,以下的实施方式并不用于限定权利要求书所保护的发明,此外,所有实施方式所说明的特征的组合并不是发明所必须的。实施方式所说明的多个特征中的两个以上的特征也可以任意地组合。此外,对相同或同样的结构标注相同的附图标记,省略重复的说明。
24.<人形体的外观>
25.首先,参照图1,对本实施方式的人形体100的外观结构的一例进行说明。图1示出人形体100的外观正面。另外,对于上下、左右、前后的箭头,示出附图中的人形体的朝向,对于其他的附图也同样。
26.人形体(也称为人形状玩具、模型)100包括:头部101、胸部102、臂部103a、103b、腹部104、腰部(腰部零部件)105以及腿部(腿部零部件)107a、107b。人形体100是可动人物模型等可动式的人形体,使各零部件能够在与其他的构件之间的关系所产生的限制区域的范围内可动。头部101与胸部102连结。在胸部102还利用球形状的连结部连结有包括右臂103a和左臂103b的臂部103(以下也称为球头连接),并在下部与腹部104连结。腹部104与腰部(第1零部件)105连结。腰部105利用球形状的连结部连结有包括右腿部107a和左腿部107b的腿部107。附图标记106表示包括人形体100的腰部105和腿部107的下半身(下身部)。以下,对下半身106的腰部105和腿部107之间的连结部即髋关节与腿部107的膝关节进行详细地说明。
27.<下半身的结构>
28.接着,参照图2,说明本实施方式的人形体100的下半身106的腰部105和腿部107的结构。图2的(a)是表示下半身106的一部分的主视图。图2的(b)是表示下半身106的一部分的侧视图。腿部107a、107b的结构和其相对于腰部105的连接结构具有同样的结构,因此,在以下的说明中省略表示左右的字母a、b来进行记载。
29.腿部107包括大腿部(第2零部件)202和小腿部(第3零部件)203,利用球形状的连结部201与腰部105连结(球头连接)。即,本实施方式的髋关节是利用球接头将腿部107以能够可动的方式与腰部105连结的部件。由此,腿部107能够相对于腰部105在被其他的构件干
渉的范围内向所有方向转动,能够实现各种的动作。另外,如图2所示,连结部201a、201b分别与腰部105的各凹部几乎无间隙地连结。如此,通过消除关节部的间隙,能够抑制由间隙引起的不适感,能够再现像人类那样的逼真的关节。
30.此外,腿部107的大腿部202和小腿部203由膝关节连结。在膝关节设有环形状的旋转部204,小腿部203能够以在环形状的旋转部204的孔贯穿的轴构件(棒构件)为中心旋转。另外,如图2的(a)所示,左右腿部107a、107b的旋转部204a、204b以该旋转部的中心线(虚线)相对于连结大腿部202和小腿部203的中心线(单点划线)具有规定的倾斜205的方式组装。也就是说,旋转部204不是沿着腿部107的中心线或与腿部107的中心线平行地设置,而是形成为相对于该中心线偏移(扭转)的状态。由此,在人形体100,能够实现从正坐的状态到以将两个腿部107a、107b向外侧打开且使臀部贴着地面的状态就坐的m字腿坐(日文:割座)(也称为萝莉坐(日文:女
の
子座
り
)、瘫坐(日文:
ペタン
座
り
)、鸭子坐(日文:
あひる
座
り
))的动作。使用图7后面叙述详细内容。
31.<下半身的组装结构>
32.接着,参照图3和图4,对本实施方式的人形体100的下半身的详细结构进行说明。图3示出本实施方式的下半身的一部分的分解图。图4示出本实施方式的人形体100的下半身的剖视图。在此,作为人形体100的下半身的一部分,对包括腰部105和左腿部107b的构造进行说明。另外,由于右腿部107a是与左腿部107b同样的结构,因此省略说明。
33.腰部105构成为包括零部件301、312。在零部件301形成有用于收容与各腿部107连结的连结构件(第1连结构件)302的凹部311。连结构件302形成为包括连结部201和把持部322。连结部201形成为球形状,以能够相对于在零部件301形成的凹部311转动的方式嵌入该凹部311。由此,连结构件302能够相对于腰部105在被其他的构件干渉的范围内向所有方向转动。因而,与连结构件302的把持部322连接的大腿部202也随着连结构件302的所有方向的转动而动作。
34.大腿部202构成为包括零部件303、304。零部件303构成为包括棒构件331,该棒构件331嵌入于连结构件302的把持部322。棒构件331通过嵌入于把持部322而作为旋转轴发挥功能。此外,零部件303与零部件304连接,零部件304与连结构件305连接。因而,大腿部202以能够将棒构件331作为旋转轴旋转的方式连接于连结构件302。该旋转方向成为与人形体100的上下方向大致同样的方向。另外,把持部322只要是将棒构件331保持为能够转动的构造就没有限定,也可以是例如环状的保持部。
35.连结构件(第2连结构件)305是将大腿部202和小腿部203连结起来而实现膝关节的零部件,构成为包括环形状的旋转部204。如上所述,旋转部204形成为环形状,贯穿其孔的轴构件作为旋转轴发挥功能,连结构件305自身以将旋转部204作为中心弯折的方式转动。因而,以与连结构件305连接的大腿部202的零部件304和小腿部203的零部件306弯折的方式进行动作,实现膝关节的动作。
36.<髋关节的动作>
37.以下,参照图5,对本实施方式的人形体100的髋关节的动作进行说明。图5的(a)和图5的(b)示出人形体100的腰部105和大腿部202的侧剖视图。
38.如图5的(a)所示,与腰部105的零部件301连结的连结构件302能够利用球形状的连结部201在箭头501方向上转动。随着连结构件302的转动,与连结构件302连结的大腿部
即零部件304也如虚线箭头所示那样转动。另外,由于连结部201是球形状,因此,连结构件302和与连结构件302连结的零部件不限于在箭头501方向上转动,而能够在被其他的构件限制的范围内向所有方向转动。由此,能够实现例如大腿部202向内侧扭转这样的动作(内八字(日文:内股))或向外侧打开的这样的动作(外八字(日文:外股))等各种的动作。
39.图5的(b)示出使零部件304从图5的(a)的状态进一步旋转而得到的样子。如上所述,零部件304与零部件303连接,零部件303的棒构件331以能够旋转的方式嵌入于连结构件302的把持部322。因而,零部件303、304能够以棒构件331作为旋转轴在箭头502的方向上旋转。该旋转动作能够使零部件304如虚线箭头所示那样从图5的(a)的状态进一步旋转。因而,利用由球形状的连结部201进行的转动动作和由棒构件331进行的旋转动作这两个阶段的动作,如图5的(b)所示,人形体100的大腿部202能够转动至靠近人形体100的腰部105、腹部104等上身部的位置(大致180度),而能够提供更大的可动区域。此外,通过实现这样的较大的可动区域,能够摆出各种姿势。
40.另外,为了确保上述的可动区域,期望的是,对于连结构件302,在形成于其一端的连结部201和形成于其另一端的把持部322之间形成为具有确保该可动区域的规定的长度。也就是说,通过具有上述规定的长度,能够减小根据大腿部202的转动而导致零部件304受到零部件301等其他的构件的干渉的范围,而能够进一步扩大可动区域。此外,如图5的(b)所示,零部件302的把持部322的外形形成为具有曲面,成为即使在大腿部202进行了旋转的情况下,上述曲面也暴露于外部而不会在该把持部322与该零部件304之间产生间隙的结构。由此,实现以下结构:即使在使大腿部202如图5的(b)所示那样进行了旋转的情况下,也不会在大腿部202的里侧产生间隙,而不会带来不自然的印象。
41.<膝关节的动作>
42.接着,参照图6,对本实施方式的人形体100的膝关节的动作进行说明。图6的(a)和图6的(b)示出人形体100的包括大腿部202和小腿部203的腿部的侧剖视图。
43.图6的(a)示出伸展腿部107的状态。图6的(b)示出使小腿部203从图6的(a)的状态以连结大腿部202和小腿部203的连结构件305的旋转部204为中心旋转而得到的样子。如图6的(b)所示,能够利用旋转部204的旋转使腿部107弯曲大致180度。为了实现这样的腿部107的弯曲动作,需要尽可能地抑制零部件304和零部件306之间的干渉。因此,根据本实施方式,如图6的(a)的虚线框601所示,将零部件306的由于旋转部204的旋转而与零部件304抵接的部分与零部件304的形状相匹配地切削而形成。通过这样形成,在图6的(b)的虚线框602所示的位置处,零部件304和零部件306紧贴地抵接,避免了在旋转时零部件306的一部分与零部件304碰撞而缩小可动区域的情况。
44.<姿势>
45.接着,参照图7,对能够由本实施方式的人形体100实现的姿势的一例进行说明。图7的(a)示出腰部105和腿部107的侧剖视图,图7的(b)示出腰部105和腿部107的主视图。
46.在图7的(a)中,示出在腿部107以旋转部204为中心弯折的状态下使大腿部202以向靠近人形体100的腰部105、腹部104的方式进行了转动的状态。在利用两腿进行这样的动作时,能够实现抱膝坐(日文:三角座
り
)(抱腿坐(日文:体育座
り
))等动作。
47.在图7的(b)中,示出腿部107以旋转部204为中心弯折且此时小腿部203向外侧打开的状态。如使用图2所说明的那样,这是因为,实现本实施方式的腿部107的弯曲动作的旋
转部204以相对于零部件304、306的中心线具有规定的倾斜205地偏移的状态(扭转的状态)形成。由此,在使腿部107a、107b弯折时,小腿部203a、203b成为分别向外侧打开的状态。因而,如图7的(b)所示,利用人形体100,能够实现将小腿部203a、203b向外侧打开且使臀部贴着地面的状态就坐的m字腿坐(也称为萝莉坐、瘫坐、鸭子坐)的动作。
48.如以上所说明的那样,本实施方式的人形体包括:第1连结构件(302),其在一端具有球形状的连结部(201),在另一端具有把持部(322);第1零部件(105、301),其形成供球形状的连结部以能够转动的方式嵌入的凹部(311);以及第2零部件(202、304),其以能够旋转的方式连接于第1连结构件的把持部。由此,能够在人形体实现更丰富多彩的姿势。
49.此外,人形体(人形状玩具、模型)的形状没有特别限定,包括人、动物、机器人、昆虫、恐龙、虚拟生物等各种各样的形状。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
