1.本发明涉及道路交通技术领域,具体为一种路面测速方法。
背景技术:
[0002][0003]
在公路养护行业大力发展的时候,由于对路况的监测需求,路面传感器也得到了长足的发展,无线力学传感器(智能颗粒)在这样的背景下应运而生,它是一个标准的颗粒式传感器,外形为2.2cm的正方体,主要包括三轴陀螺仪、三轴加速度计、三轴应变片,可以模拟实际颗粒获取转角、加速度、应力等数据。
[0004]
智能颗粒最初应用铁路领域,用于监测道砟颗粒的移动,后开始应用于公路行业,主要监测室内与现场沥青混合料压实过程中颗粒的转动情况,为现场的压实方案设计以及集料配合比设计提供参考意见。
[0005]
随着道路工程这一交叉学科不断发展,尤其是公路养护行业,为了监测道路的运营情况,不仅需要获得路面内部的力学相关参数,而且还需要获取大量的路面交通数据,以便综合制定养护方案,因此,道路领域的传感器设备不仅应该具有土木行业中监测力学特性的功能,在交通行业也该有一些应用,只有这样的多功能传感器才能在道路与交通交叉领域的发展中得到充分应用。
技术实现要素:
[0006]
为实现上述目的,本发明提供如下技术方案:一种路面测速方法,包括如下步骤:
[0007]
a.在路面层埋设无线力学传感器,并进行初始标定,通过无线力学传感器采集行驶车辆对路面产生的竖向应力电压数据;
[0008]
b.利用无线力学传感器出厂时的回归公式计算竖向应力;
[0009]
c.利用vba程序导出实测应力对应的相对时间,并绘制实际的竖向应力时程图;
[0010]
d.利用应力波峰值时差及行车前后轮间距计算实测车速。
[0011]
优选的,所述在步骤a中,应放置无线力学传感器于路面一边,采集静态电压数据,而后埋设其于路面层中,当车辆行驶过,利用采集软件smartrock-ble-gui采集动态电压数据。
[0012]
优选的,所述在步骤a中,采集频率根据行车前后轮间距和车速大致确定,行车前后轮间距和车速较低时(小于30km/h)应采用较低采集频率,一般为50hz,行车前后轮间距和车速较高时(大于 30km/h)应采用较高采集频率,一般为100hz或200hz。
[0013]
优选的,所述在步骤b中,利用无线力学传感器出厂时设定的应力回归公式u-u0=a*f b*ln(t) c计算路面竖向应力,回归系数a、 b、c应根据无线力学传感器出厂标定结果确定。
[0014]
优选的,所述在步骤b中,无线力学传感器出厂时设定的应力回归公式中,t代表测试时路面内部温度,应读取无线力学传感器中温度传感器的稳定读数。
[0015]
优选的,所述在步骤b中,无线力学传感器出厂时设定的应力回归公式中,f代表实测竖向应力值,应利用行车时的动态电压与标定时的静态电压差值进行计算。
[0016]
优选的,所述在步骤c中,采用excel中的vba程序获取竖向应力所对应的相对时刻,绘制竖向应力时程图。
[0017]
优选的,所述在步骤d中,找到应力时程图中竖向应力峰值所对应的时刻,计算相邻峰值间的时刻差值即加载间隔t。
[0018]
优选的,所述在步骤d中,根据行驶车辆前后轮的间距s以及加载间隔t,通过来计算车辆行驶速度。
[0019]
与现有技术相比,本发明的有益效果是:
[0020]
本发明通过无线力学传感器所采集到的竖向应力这一力学响应来获取车辆前后轮的时刻差,进而根据车辆前后轮间距来计算车辆的行驶速度。该测速方法简便实用,且是基于力学响应数据计算获得的,有利于无线力学传感器应用于道路交通交叉领域;
[0021]
通过计算出的车辆行驶速度不仅可以忽略车辆轴载对车速的影响,另外所测速度不受平面位置的影响,可以根据实际需要及便利埋设无线力学传感器进行数据采集。
附图说明
[0022]
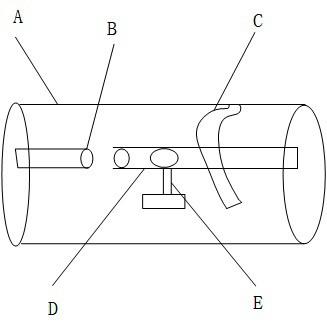
图1为本发明平面布置图;
[0023]
图2为剖面布置图。
具体实施方式
[0024]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0025]
请参阅图1和图2,本发明提供一种技术方案:一种路面测速方法,包括如下步骤:
[0026]
a.在路面层埋设无线力学传感器,并进行初始标定,通过无线力学传感器采集行驶车辆对路面产生的竖向应力电压数据;
[0027]
b.利用无线力学传感器出厂时的回归公式计算竖向应力;
[0028]
c.利用vba程序导出实测应力对应的相对时间,并绘制实际的竖向应力时程图;
[0029]
d.利用应力波峰值时差及行车前后轮间距计算实测车速。
[0030]
在步骤a中,应放置无线力学传感器于路面一边,采集静态电压数据,而后埋设其于路面层中,当车辆行驶过,利用采集软件 smartrock-ble-gui采集动态电压数据,在步骤a中,采集频率根据行车前后轮间距和车速大致确定,行车前后轮间距和车速较低时应采用较低采集频率,一般为50hz,行车前后轮间距和车速较高时应采用较高采集频率,一般为100hz或200hz;
[0031]
在步骤b中,利用无线力学传感器出厂时设定的应力回归公式 u-u0=a*f b*ln(t) c计算路面竖向应力,回归系数a、b、c应根据无线力学传感器出厂标定结果确定,在步骤b中,无线力学传感器出厂时设定的应力回归公式中,t代表测试时路面内部温度,应读取
无线力学传感器中温度传感器的稳定读数,在步骤b中,无线力学传感器出厂时设定的应力回归公式中,f代表实测竖向应力值,应利用行车时的动态电压与标定时的静态电压差值进行计算;
[0032]
在步骤c中,采用excel中的vba程序获取竖向应力所对应的相对时刻,绘制竖向应力时程图;
[0033]
在步骤d中,找到应力时程图中竖向应力峰值所对应的时刻,计算相邻峰值间的时刻差值即加载间隔t,在步骤d中,根据行驶车辆前后轮的间距s以及加载间隔t,通过来计算车辆行驶速度。
[0034]
所用测速车辆是用于进行足尺加速加载试验的apt加载车,该车最高车速可以达到22km/h,测试场地在室内实验室中;
[0035]
在本实施例中,加载车将在四种车速和五种轴载下行驶,加速车轮是在车内循环行驶,且每种速度下测试时间为3min左右,因此会得到充分的数据点;
[0036]
表1加载工况表
[0037][0038]
沿轮迹带方向埋设两个,用来对照,垂直于轮迹带方向在双轮下及距离外轮30cm处各埋设一个,总共为6个采集数据;
[0039]
智能颗粒全部都埋设于距离路表10cm处;
[0040]
绘制以相对时刻表示的竖向应力时程图,图中最少应包含3个以上的应力峰,所绘制的竖向应力时程图以外轮载下20kn-5km/h工况为例;
[0041]
找到应力时程图中竖向应力峰值所对应的时刻,计算相邻峰值间的时刻差值即加载间隔t;
[0042]
加速加载车前后轮的间距s为10/3m。
[0043]
表2外轮下实测加载间隔表(tm/s)
[0044]
[0045]
表3外轮下计算车速表(vc/m
·
s-1
)
[0046][0047]
表4距外轮30cm处实测加载间隔表(tm/s)
[0048][0049]
表5距外轮30cm处计算车速表(vc/m
·
s-1
)
[0050][0051][0052]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。