1.本发明涉及一种隧洞探测装置,尤其涉及一种有隧洞智能探测深度装置。
背景技术:
2.选矿中分选作业的产物中有用目标组分含量较低而无法用于生产的部分称为尾矿,随着经济的发展,对矿产品需求大幅度增加,矿业开发规模随之加大,产生的选矿尾矿数量将不断增加,而大量堆存的尾矿,造成不少矿业、环境及经济方面的问题,若尾矿长期堆存,将导致尾矿排洪隧洞长期浸水或堵塞,进而引发隧洞坍塌等事故,对施工人员的人身安全造成巨大威胁,并极可能造成严重的环境污染。
3.传统的隧洞探测方式,是通过探测人员将探测器捆绑在细绳上,随后再将探测器放入隧洞中,随着探测器的深入,探测人员可对细绳的长度进行记录,从而判断出隧洞的深度,在此过程中,探测人员只能通过细绳的长度来判断隧洞的深度,但无法对隧洞内部的情况进行影像记录,随着隧洞的深度越来越大,隧洞内部的光线越来越少,探测人员无法通过肉眼来判断探测器深入的深度,从而增加了探测人员的工作难度。
4.为此,我们设计了一种能记录影像资料和自动对隧洞内部进行照明的有隧洞智能探测深度装置。
技术实现要素:
5.为了克服隧洞探测装置无法记录影像资料和无法自动对隧洞内部进行照明的缺点,本发明提供一种能记录影像资料和自动对隧洞内部进行照明的有隧洞智能探测深度装置。
6.本发明是这样实现的,一种有隧洞智能探测深度装置,包括:底座、摄像头、长度调节机构、探查机构和深度测量机构,底座上设有长度调节机构,长度调节机构上设有探查机构,探查机构上设有记录隧洞内部情况的摄像头,探查机构上设有深度测量机构。
7.在本发明一个较佳实施例中,长度调节机构包括:底座上中部设有第一固定板,第一固定板中部转动式设有转杆,转杆下部设有开关键,转杆上侧安装有第一电动推杆,第一电动推杆伸缩杆上侧设有第一距离传感器,底座上内壁中部设有第二固定板,第二固定板上侧转动式设有绕线轮,第一电动推杆伸缩杆上侧转动式设有滑轮组,绕线轮上设有拉绳,拉绳绕过滑轮组,拉绳上设有第三固定板。
8.在本发明一个较佳实施例中,探查机构包括:第三固定板上设有光电传感器,第三固定板底部安装有减速电机,减速电机输出轴与摄像头连接,第三固定板上设有多个对隧洞内部进行照明的led照明灯具。
9.在本发明一个较佳实施例中,深度测量机构包括:底座上内壁安装有驱动电机,驱动电机输出轴与绕线轮之间连接有皮带轮组件,第三固定板下侧滑动式设有滑板,第三固定板上绕有四根第一弹簧,四根第一弹簧两端分别与滑板和第三固定板,滑板中部设有第二距离传感器。
10.在本发明一个较佳实施例中,还包括有角度调节机构,角度调节机构包括:转杆上设有旋转把手,转杆上两侧均设有齿轮,转杆上两侧均绕有扭力弹簧,扭力弹簧两端分别与第一固定板和齿轮连接。
11.在本发明一个较佳实施例中,还包括有回复机构,回复机构包括:第一固定板中部设有第四固定板,第一固定板上安装有第二电动推杆,第四固定板上滑动式设有棘条,棘条与第二电动推杆伸缩杆连接,棘条上绕有第二弹簧,第二弹簧两端分别与棘条和第四固定板连接。
12.在本发明一个较佳实施例中,还包括有稳定机构,稳定机构包括:底座上设有多个第五固定板,第五固定板中部均滑动式设有撞针,撞针上均绕有第三弹簧,第三弹簧两端分别与底座和撞针连接。
13.在本发明一个较佳实施例中,还包括有控制箱,底座上安装有控制箱,控制箱内安装有开关电源、控制模块和电源模块,开关电源为有隧洞智能探测深度装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;开关键、第一距离传感器、光电传感器和第二距离传感器均与控制模块通过电性连接,第一电动推杆、减速电机、led照明灯具和第二电动推杆均与控制模块通过继电器控制模块连接,驱动电机与控制模块通过直流电机正反转模块连接。
14.本发明提供了一种有隧洞智能探测深度装置,具备以下有益效果:1、本发明通过控制模块控制led照明灯具工作,led照明灯具散发出光线,led照明灯具散发出的光线对隧洞进行照明,从而有利于使用者观察隧洞内部情况,实现led照明灯具照明隧洞内部效果;2、当控制模块控制减速电机工作,减速电机输出轴带动摄像头转动,摄像头在转动的过程中,摄像头会将隧洞内部的情况进行记录,实现摄像头记录隧洞内部效果;3、本发明通过撞针转动到与地面接触后,使得撞针深入地面,从而对底座进行固定,防止底座发生位置偏移,实现撞针固定底座效果;4、当转杆转动到指定位置后,使用者控制旋转把手停留,从而对转杆的角度进行固定,从而方便摄像头开展探查工作,实现旋转把手调整转杆角度效果。
附图说明
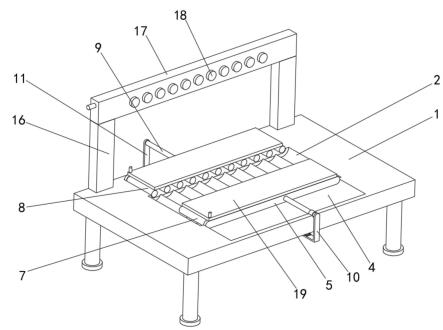
15.图1为本发明的整体立体结构示意图。
16.图2为本发明的第一部分立体结构示意图。
17.图3为本发明的第二部分立体结构示意图。
18.图4为本发明的长度调节机构第一部分立体结构示意图。
19.图5为本发明的长度调节机构第二部分立体结构示意图。
20.图6为本发明的探查机构第一部分立体结构示意图。
21.图7为本发明的探查机构第二部分立体结构示意图。
22.图8为本发明的深度测量机构第一部分立体结构示意图。
23.图9为本发明的深度测量机构第二部分立体结构示意图。
24.图10为本发明的a处放大立体结构示意图。
25.图11为本发明的角度调节机构立体结构示意图。
26.图12为本发明的b处放大立体结构示意图。
27.图13为本发明的回复机构立体结构示意图。
28.图14为本发明的c处放大立体结构示意图。
29.图15为本发明的稳定立体结构示意图。
30.图16为本发明的电路框图。
31.图17为本发明的电路原理图。
32.其中,上述附图包括以下附图标记:1、底座,2、控制箱,3、摄像头,4、长度调节机构,41、第一固定板,42、转杆,43、开关键,44、第一电动推杆,4401、第一距离传感器,45、第二固定板,46、绕线轮,47、滑轮组,48、拉绳,49、第三固定板,5、探查机构,51、光电传感器,52、减速电机,53、led照明灯具,6、深度测量机构,61、驱动电机,62、皮带轮组件,63、滑板,64、第一弹簧,65、第二距离传感器,7、角度调节机构,71、旋转把手,72、齿轮,73、扭力弹簧,8、回复机构,81、第四固定板,82、第二电动推杆,83、第二弹簧,84、棘条,9、稳定机构,91、第五固定板,92、撞针,93、第三弹簧。
具体实施方式
33.尽管可关于特定应用或行业来描述本发明,但是本领域的技术人员将会认识到本发明的更广阔的适用性。本领域的普通技术人员将会认识到诸如:在上面、在下面、向上、向下等之类的术语是用于描述附图,而非表示对由所附权利要求限定的本发明范围的限制。诸如:第一或第二之类的任何数字标号仅为例示性的,而并非旨在以任何方式限制本发明的范围。
34.请参阅图1-图17,本发明提供一种技术方案:一种有隧洞智能探测深度装置,包括有底座1、摄像头3、长度调节机构4、探查机构5和深度测量机构6,底座1上设有长度调节机构4,长度调节机构4上设有探查机构5,探查机构5上设有深度测量机构6,探查机构5上设有摄像头3。
35.长度调节机构4包括有第一固定板41、转杆42、开关键43、第一电动推杆44、第一距离传感器4401、第二固定板45、绕线轮46、滑轮组47、拉绳48和第三固定板49,底座1上中部焊接有第一固定板41,第一固定板41中部转动式设有转杆42,转杆42前侧下部设有开关键43,转杆42上侧通过螺栓固定安装有第一电动推杆44,第一电动推杆44伸缩杆上侧固定设有第一距离传感器4401,底座1上内壁中部焊接有第二固定板45,第二固定板45上侧转动式设有绕线轮46,第一电动推杆44伸缩杆上侧转动式设有滑轮组47,绕线轮46上设有拉绳48,拉绳48绕过滑轮组47,拉绳48上固定设有第三固定板49。
36.探查机构5包括有光电传感器51、减速电机52和led照明灯具53,第三固定板49前侧右部固定设有光电传感器51,第三固定板49底部中间通过螺栓固定安装有减速电机52,减速电机52输出轴与摄像头3连接,第三固定板49上固定设有多个led照明灯具53。
37.深度测量机构6包括有驱动电机61、皮带轮组件62、滑板63、第一弹簧64和第二距离传感器65,底座1上内壁右侧通过螺栓固定安装有驱动电机61,第三固定板49下侧滑动式设有滑板63,驱动电机61输出轴后侧与绕线轮46后侧之间连接有皮带轮组件62,皮带轮组件62由两个皮带轮和一根皮带组成,两个皮带轮分别设在驱动电机61输出轴后侧和绕线轮
46后侧,皮带绕在两个皮带轮之间,第三固定板49上绕有四根第一弹簧64,四根第一弹簧64两端分别与滑板63和第三固定板49,滑板63中部固定设有第二距离传感器65。
38.还包括有角度调节机构7,角度调节机构7包括有旋转把手71、齿轮72和扭力弹簧73,转杆42后侧固定设有旋转把手71,转杆42前后两侧均固定设有齿轮72,转杆42前后两侧均绕有扭力弹簧73,扭力弹簧73位于齿轮72外侧,扭力弹簧73两端分别与第一固定板41和齿轮72连接。
39.还包括有回复机构8,回复机构8包括有第四固定板81、第二电动推杆82、棘条84和第二弹簧83,第一固定板41左侧中部设有第四固定板81,第一固定板41后侧通过螺栓固定安装有第二电动推杆82,第四固定板81左侧滑动式设有棘条84,棘条84与第二电动推杆82伸缩杆连接,棘条84与齿轮72配合,棘条84前侧绕有第二弹簧83,第二弹簧83两端分别与棘条84和第四固定板81连接。
40.还包括有稳定机构9,稳定机构9包括有第五固定板91、撞针92和第三弹簧93,底座1上焊接有多个第五固定板91,第五固定板91中部均滑动式设有撞针92,第五固定板91顶部开有与撞针92配合的板槽,撞针92上均绕有第三弹簧93,第三弹簧93两端分别与底座1和撞针92连接。
41.还包括有控制箱2,底座1上通过螺栓固定安装有控制箱2,控制箱2内安装有开关电源、控制模块和电源模块,开关电源为有隧洞智能探测深度装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;开关键43、第一距离传感器4401、光电传感器51和第二距离传感器65均与控制模块通过电性连接,第一电动推杆44、减速电机52、led照明灯具53和第二电动推杆82均与控制模块通过继电器控制模块连接,驱动电机61与控制模块通过直流电机正反转模块连接。
42.本发明的工作原理是,当人们想要对隧洞深度进行探测时,可使用这种有隧洞智能探测深度装置,首先,使用者按下电源总开关,将本装置上电,长度调节机构4中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值大,深度测量机构6中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值小,使用者将本装置搬运到隧洞附近后,使用者转动长度调节机构4,从而对探查机构5中角度进行调节,长度调节机构4转动到指定位置后,使用者控制长度调节机构4停止转动,接着使用者按下长度调节机构4,使得控制模块控制长度调节机构4运转,与此同时,控制模块控制深度测量机构6运转,深度测量机构6带动探查机构5和摄像头3向下运动,当长度调节机构4运转到长度调节机构4的第一预设值时,使得控制模块控制长度调节机构4停止工作,与此同时,控制模块控制探查机构5运转,探查机构5带动摄像头3转动,摄像头3在转动的过程中,摄像头3会将隧洞内部的情况进行记录,当深度测量机构6与隧洞地底之间的距离达到深度测量机构6的第一预设值时,使得控制模块控制深度测量机构6停止工作,隧洞探查完成后,使用者再次按下长度调节机构4,使得控制模块控制长度调节机构4和深度测量机构6反向运转,深度测量机构6带动探查机构5和摄像头3向上运动,当长度调节机构4运转到长度调节机构4的第二预设值时,使得控制模块控制长度调节机构4停止工作,当深度测量机构6与隧洞地底之间的距离达到深度测量机构6的第二预设值时,使得控制模块控制深度测量机构6停止工作,使用者再次按下电源总开关,将本装置断电。
43.第一距离传感器4401中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值大,使用者转动转杆42,转杆42带动第一电动推杆44、第一距离传感器4401、第二固定板45、绕线轮46、滑轮组47、拉绳48、第三固定板49和深度测量机构6转动,转杆42转动到指定位置后,使用者停止转动转杆42,随后使用者按下开关键43,使得控制模块控制第一电动推杆44伸缩杆向上伸长,第一电动推杆44伸缩杆带动滑轮组47向上运动,当第一距离传感器4401与转杆42之间的距离达到第一距离传感器4401的第一预设值时,使得控制模块控制第一电动推杆44停止工作,使得第一电动推杆44对第三固定板49的长度进行调节,方便摄像头3开展探测工作,使用者再次按下开关键43,使得控制模块控制第一电动推杆44伸缩杆向下缩短,第一电动推杆44伸缩杆带动滑轮组47向下运动,当第一距离传感器4401与转杆42之间的距离达到第一距离传感器4401的第二预设值时,使得控制模块控制第一电动推杆44停止工作,接着使用者反向转动转杆42,转杆42带动第一电动推杆44、第一距离传感器4401、第二固定板45、绕线轮46、滑轮组47、拉绳48、第三固定板49和深度测量机构6反向转动到恢复原位。
44.当第一距离传感器4401与转杆42之间的距离达到第一距离传感器4401的第一预设值时,使得控制模块控制led照明灯具53工作,led照明灯具53散发出光线,led照明灯具53散发出的光线对隧洞进行照明,从而有利于使用者观察隧洞内部情况,当led照明灯具53散发出的光线强度达到光电传感器51预设值时,使得控制模块控制减速电机52工作,减速电机52输出轴带动摄像头3转动,摄像头3在转动的过程中,摄像头3会将隧洞内部的情况进行记录,当第一距离传感器4401与转杆42之间的距离达到第一距离传感器4401的第二预设值时,使得控制模块控制led照明灯具53停止工作,led照明灯具53随之停止散发出光线,当led照明灯具53散发出的光线强度低于光电传感器51预设值时,使得控制模块控制减速电机52停止工作,摄像头3随之停止转动。
45.第二距离传感器65中设置有第一预设值和第二预设值,第一预设值的数值比第二预设值的数值小,使用者按下开关键43后,使得控制模块控制驱动电机61工作,驱动电机61输出轴带动皮带轮组件62和转杆42转动,使得绕线轮46松开拉绳48,拉绳48带动滑轮组47转动,拉绳48带动第三固定板49、led照明灯具53、减速电机52、摄像头3、光电传感器51、滑板63、第一弹簧64和第二距离传感器65向下运动,使得摄像头3深入隧洞,从而对隧洞内部进行详细的探查,第二距离传感器65向下运动到与隧洞内,当第二距离传感器65与隧洞地底之间的距离达到第二距离传感器65的第一预设值时,使得控制模块控制驱动电机61停止工作,使用者再次按下开关键43后,使得控制模块控制驱动电机61工作,驱动电机61输出轴带动皮带轮组件62和转杆42反向转动,绕线轮46对拉绳48进行缠绕,拉绳48带动滑轮组47反向转动,拉绳48带动第三固定板49、led照明灯具53、减速电机52、摄像头3、光电传感器51、滑板63、第一弹簧64和第二距离传感器65向上运动,当第二距离传感器65与隧洞地底之间的距离达到第二距离传感器65的第二预设值时,使得控制模块控制驱动电机61停止工作。
46.当使用者想要对转杆42的角度进行调整时,使用者转动旋转把手71,旋转把手71带动齿轮72和转杆42转动,扭力弹簧73扭转形变,转杆42转动到指定位置后,使用者控制旋转把手71停留,从而对转杆42的角度进行固定,从而方便摄像头3开展探查工作,摄像头3探查完成后,使用者松开旋转把手71,扭力弹簧73复位,从而带动旋转把手71、齿轮72和转杆
42反向转动到恢复原位。
47.棘条84对齿轮72进行卡紧后,当第二距离传感器65与隧洞地底之间的距离达到第二距离传感器65的第二预设值时,使得控制模块控制第二电动推杆82伸缩杆向前伸长一秒钟后静止一分钟,第二电动推杆82伸缩杆带动棘条84向前运动,第二弹簧83被压缩,棘条84向前运动脱离齿轮72后,处于扭转形变的扭力弹簧73复位,从而带动旋转把手71、齿轮72和转杆42转动到恢复原位,从而解除棘条84对齿轮72的卡紧状态,一分钟后,控制模块控制第二电动推杆82伸缩杆向后缩短一秒钟后关闭,第二电动推杆82伸缩杆带动棘条84向后运动,第二弹簧83复位,棘条84向后运动到与齿轮72接触。
48.使用者将底座1搬运到隧洞附近后,使用者转动撞针92,使得撞针92上部与板槽对应,处于拉伸状态的第三弹簧93复位,从而带动撞针92向下插入地底,从而对底座1进行固定,防止底座1发生位置偏移,探查结束后,使用者使得撞针92向上,第三弹簧93被拉伸,当撞针92上部位于第五固定板91上方时,反向转动撞针92复位,从而将撞针92收回底座1内。
49.以上对本技术进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。